堆场平行岸线的自动化码头水平运输建模与仿真
2021-03-15李天昊
李天昊 周 强 田 宇,2
1武汉理工大学物流工程学院 武汉 430063 2上海国际港务(集团)股份有限公司 上海 200080
0 引言
随着无人驾驶技术的发展和集装箱码头自动化程度的不断提高,堆场平行岸线布置的集装箱码头开始采用无人驾驶集卡进行水平运输自动化改造。但陆域集疏运作业仍旧使用人工驾驶集卡,无人-人工驾驶集卡在码头内部混合通行,势必会对集装箱码头水平运输自动化产生影响。如何对无人驾驶集卡和人工驾驶集卡进行精准管控,确保码头水平运输作业的安全与高效,是集装箱码头水平运输自动化改造过程中研究的焦点。
集装箱码头水平运输系统是一个典型的复杂系统,系统内影响因素众多,计算机建模仿真提供了一种简单有效的研究方法[1,2]。虽然国内外专家对集装箱码头自动化改造方面有一定的研究成果[3,4],但对采用无人驾驶集卡的集装箱码头水平运输自动化改造研究还处于探索阶段。因此,依据集装箱码头水平运输自动化改造方案,探索元胞自动机(cellular automata,以下简称CA)与Agent相结合的建模方法,构建基于CA-Agent的集装箱码头水平运输系统模型,从系统角度研究无人-人工驾驶集卡通行优先级和装卸道容量两类集卡管控策略对码头生产作业的影响。
1 集装箱码头水平运输自动化改造
1.1 集装箱码头平面布置及装卸工艺
集装箱码头堆场平行岸线的平面布置是码头最为常见的布置形式,其装卸工艺主要采用堆场起重机(以下简称场桥)+集卡+岸边集装箱起重机(以下简称岸桥)的形式。该种集装箱码头平面布置和装卸工艺下,集卡可以沿箱区侧面的装卸道行驶至目标箱位处,由场桥完成堆场与集卡的集装箱装卸交接。集装箱在堆场的水平移动主要依靠集卡,场桥的大车行走机构为非工作机构。装卸船内集卡和集疏运外集卡不能分开行驶,不可避免存在2类集卡混行交叉的冲突情况,给码头的水平运输自动化带来了复杂的安全与效率问题。堆场平行岸线布置的集装箱码头平面布置及交通流向如图1所示。
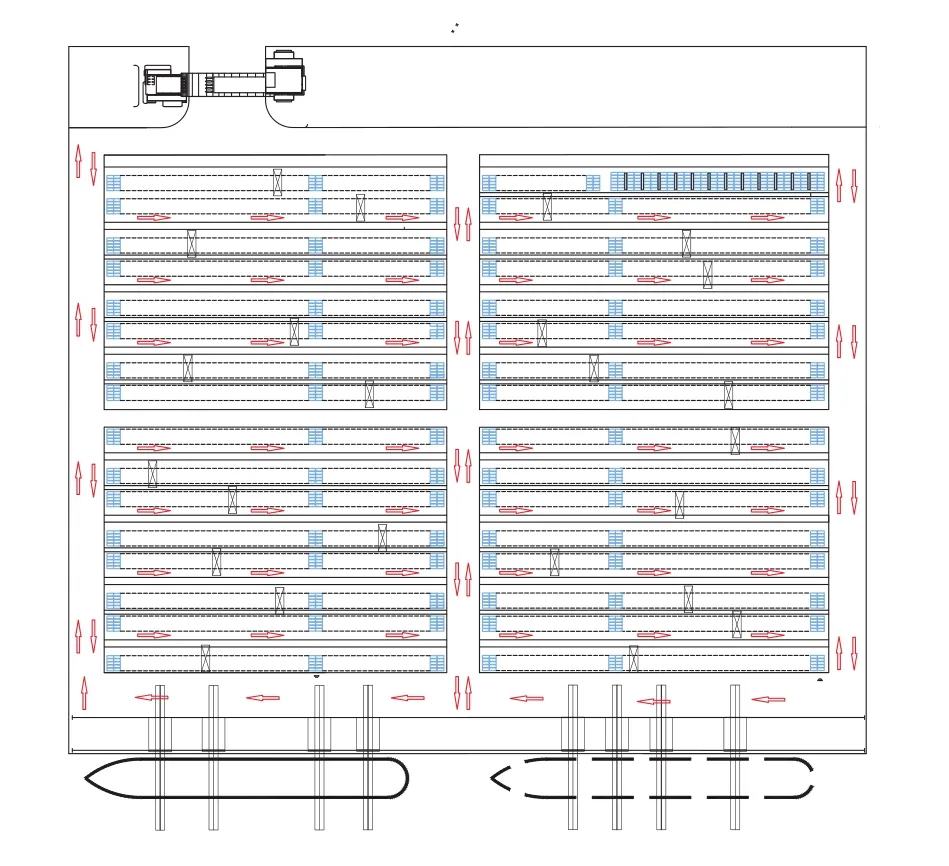
图1 集装箱码头平面布置和交通流向示意图
1.2 水平运输自动化改造
集装箱码头的水平运输自动化改造主要包括内集卡无人化、集卡导引自动化以及交通管控的精准化3个方面。
首先,集装箱码头通过高精度雷达、车载摄像头、5G与V2X通讯以及自动驾驶等技术对传统集卡进行自动化改造,实现港区内集卡的无人驾驶。无人驾驶系统充分与电气控制系统(ECS)系统交互,利用码头设备间的信息协同,实现内集卡的远程控制和港区环境下的车路协同。
其次,码头生产管理系统(TOS)与车辆管理系统(VMS)进行结合,通过无线通讯技术,将装卸任务信息发布给相应集卡,通过集卡实时定位结合排队信息,控制集卡运行路线与顺序,指挥引导集卡自动停在正确位置,实现集卡引导自动化。
最后,码头设置智能闸杆和交通信号灯等管控设备,控制内、外集卡的通行优先级和装卸道容量,实现多场区通行次序管制。通过内、外集卡的精确定位,结合车辆管理系统控制无人驾驶集卡的跟驰距离与停车间距,实现内、外集卡在系统控制下的精确运行,确保无人驾驶集卡和人工驾驶集卡能够混合运行,实现交通管控的精准化。
2 集装箱码头水平运输系统建模
2.1 CA与Agent建模方法
元胞自动机[4]是由Von Neuman所提出的一种在离散时空框架下根据有限状态进行演化的动力学系统。元胞自动机由元胞、元胞空间、邻居、元胞状态和规则变换函数5部分构成,其相互关系如图2所示。CA方法具有建模简单、仿真效率高的特点,但也存在对道路、车辆、控制规则过度简化而产生的精度不足的问题。

图2 元胞自动机结构示意图
Agent理论[5]是由Minsky所提出的一类具有相互沟通能力、环境适应能力以及通过学习改变自身行为和运行规则的个体。Agent的基本结构如图3所示,一般具有感知、执行、决策、通信、知识库等模块。Agent模型能够较好地反映无人驾驶集卡和人工驾驶集卡的车辆控制、调度等过程,但也存在建模过程复杂度高、考虑因素众多、仿真效率低下的问题。
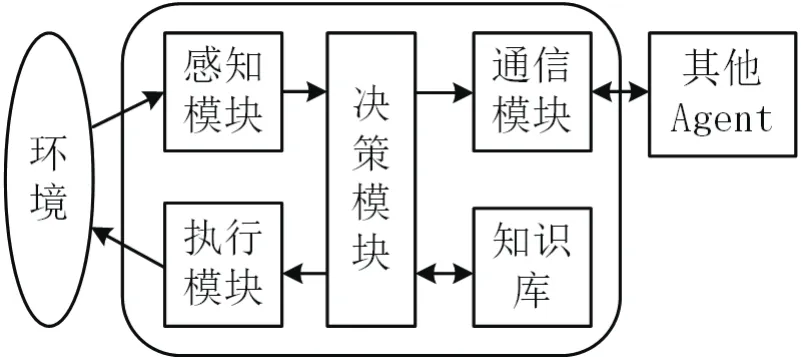
图3 Agent基本结构
CA和Agent理论都可以对集装箱码头等复杂系统进行抽象描述,在理论描述和建模应用方面存在相关性。两者都具有可迁移、可扩展的开放性;具有自下而上的建模方式;运用演化规则推动系统运行;采用并行计算方式将复杂问题离散化分解;都具有空间特性,使得两者具有结合的可能性。因此,通过对CA方法进行元胞定义、状态以及演化规则的扩展,实现与Agent方法的相互融合,在保证水平运输自动化集装箱码头仿真精度的情况下,提高码头水平运输作业的仿真效率。
2.2 基于CA-Agent的模型框架
基于CA-Agent的集装箱码头水平运输模型框架由系统控制层、道路元胞空间以及装卸设备元胞空间3部分组成,如图4所示。

图4 模型整体框架图
系统控制层包括集装箱码头道路交通控制信号和生产作业控制信息,交通控制信号控制装卸道容量,集卡通行优先级、跟驰距离、停车间距等集卡行驶状态;生产作业控制信息负责集卡Agent、场桥元胞、岸桥元胞的任务分配和设备调度。道路元胞空间是集装箱码头路网结构的映射,根据码头路网结构和功能的不同,划分为车辆行驶速度与规则各异的路网元胞。集卡Agent模拟实际集卡的功能与状态,在路网元胞上行驶并进行水平运输作业,与感知范围内的元胞和集卡Agent进行信息交互。装卸设备元胞空间主要包含场桥和岸桥元胞,两类元胞在判断集卡Agent到达指定装卸位置后,会根据集疏运、装卸类型任务类型,模拟实际集装箱装卸的过程。
模型的3个部分之间都设置有标准的数据接口,即各部分之间可以通过相同的数据结构和输入输出方式进行信息交换。
2.3 路网及装卸设备元胞模型构建
2.3.1 元胞划分及状态设置
集装箱码头路网和装卸设备根据位置和功能划分为如图5所示的7类元胞,其中白色为主干道元胞C1,灰色的代表交叉口元胞C2,粉色的为装卸道元胞C3,橙色的为超车道元胞C4,浅绿色的前沿道路为C5;场桥元胞用Cc,岸桥元胞用Ca表示。元胞具有位置信息和状态信息,元胞的属性设计如下:

图5 路网及装卸设备元胞局部示意图
元胞的位置信息用三维数组(Cn,Cx,Cy)表示,其中Cn代表元胞的类型,Cx、Cy代表元胞的横、纵坐标位置,集卡利用所在道路元胞的坐标值可以计算车辆的间隔距离。
元胞占据状态用O表示,O={1,0} 。其中0表示当前元胞没有被集卡或装卸设备占据为空闲等待状态;1表示元胞被占据。
集卡的行驶方向用状态D表示,D={1,2,3,4}。1表示集卡向下行驶,2、3、4分别表示集卡向右、向上和向左移动。
集卡的速度用状态V表示,V={0,1,2,…,Vmax}。集卡Agent行驶速度按照一个仿真步长经过的元胞数量来计算。
装卸状态用L表示,L={0,1}。其中0代表当前道路上没有集卡进行装卸作业或装卸设备未进行装卸作业;1代表在车辆进行装卸作业或装卸设备正在进行装卸作业。
2.3.2 装卸设备元胞的演化规则
每个箱区的场桥元胞内只有1台场桥进行装卸作业,当有集卡正在进行装卸作业时,装卸道上的其他集卡必须排队等待。场桥在有装卸作业任务时,会根据自身移动速度,经过一定的仿真步长到达指定元胞位置进行作业。场桥元胞的装卸作业示意图和流程图如图6、图7所示。
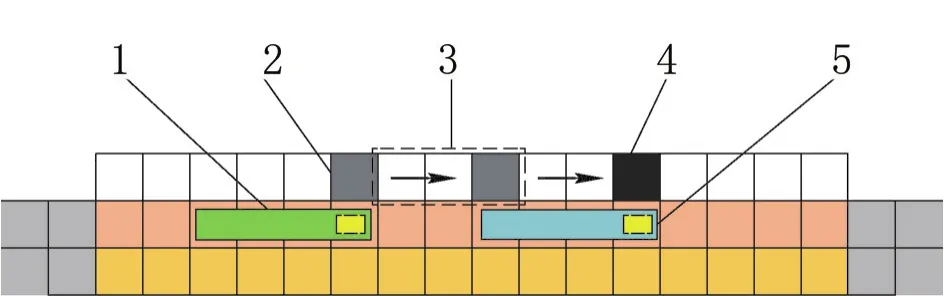
图6 场桥元胞装卸作业示意图
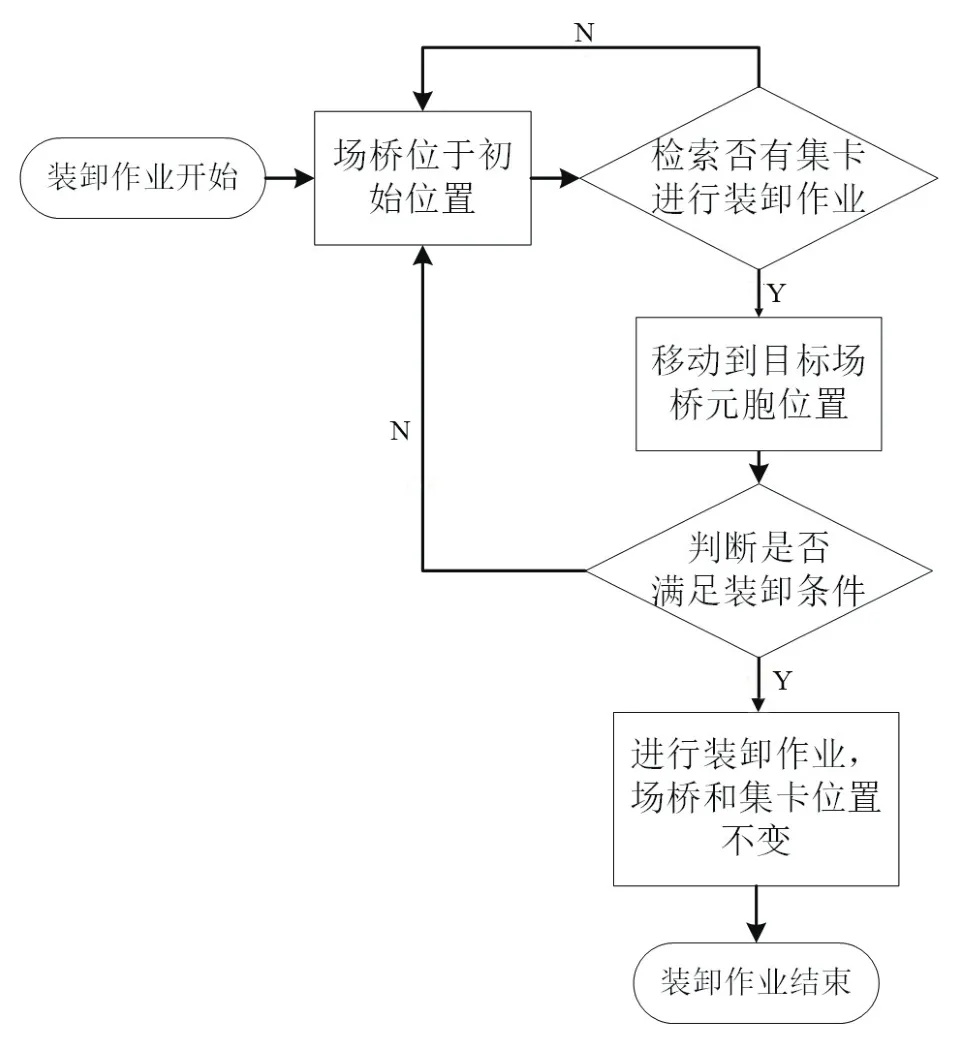
图7 场桥元胞作业流程图
岸桥元胞内可以有多台岸桥同时作业,每台岸桥负责一条泊位前沿道路。岸桥移动到目标元胞位置且集卡到达泊位前沿的指定装卸点,岸桥进行装卸船作业,如果岸桥已经在目标元胞位置则不需要移动。岸桥元胞装卸作业示意图和流程图如图8和图9所示。

图8 岸桥元胞装卸作业示意图
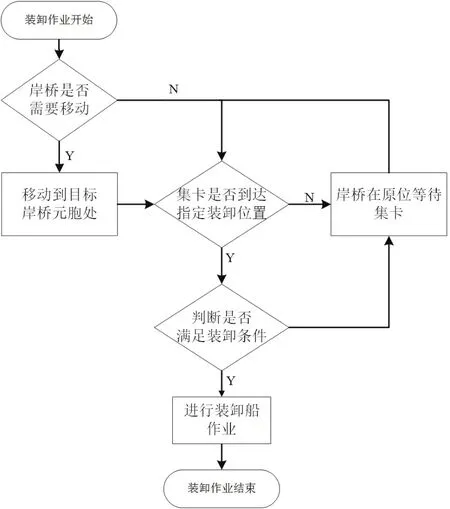
图9 岸桥元胞作业流程图
2.4 集卡Agent构建
集卡Agent和无人驾驶集卡一样,能接受来自车辆管理系统的管控信息,根据集卡所感知的环境信息,结合车辆自身状态和控制规则进行驾驶行为的自我判断。集卡Agent的结构如图10所示,主要由传感器、状态库、规则库、决策模块、执行模块5个部分构成。
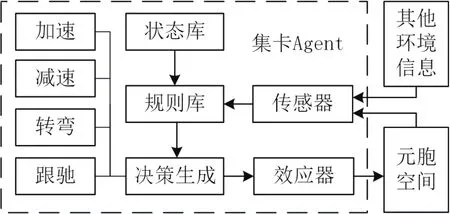
图10 集卡Agent结构
其中传感器用于采集元胞空间和其他集卡Agent的状态信息,同时接受交通控制与生产作业控制等环境信息;状态库则是保存了集卡Agent当前的作业任务、速度、位置、集装箱装卸点等状态信息;规则库内包含了无人驾驶集卡在各类道路段上行驶的通行规则;决策模块根据当前状态库、规则库以及传感器的信息进行综合决策,决定下一时刻车辆的行驶状态和位置并将数据传输给效应器;最后由效应器具体执行集卡Agent位置及状态信息的变化。
集卡Agent的行驶与交通规则如下:
1)加速规则 加速过程表示的是集卡在集装箱码头内期望以最大的速度行驶的特性,集卡Agent在主干道和超车道可以加速行驶,规则表示为
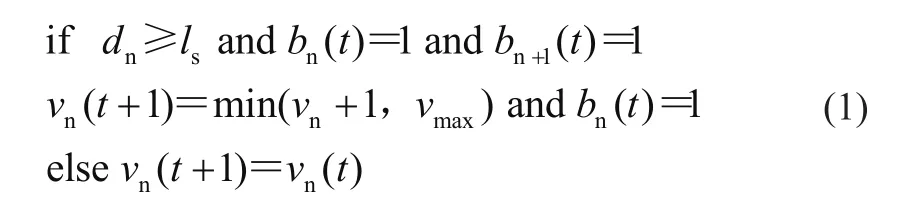
式中:ls为集卡的安全距离,dn为集卡n和集卡n+1之间的元胞数,l为车辆长度,bn(t)为当前时间集卡的加、减以及匀速的情况,其中bn(t)=1为加速状态;vn为集卡n当前时刻速度,vmax为当前道路集卡可以行驶的最大速度。
2)减速规则 无人驾驶集卡在集装箱码头主干道、交叉口、装卸道等道路部分需要根据前车状况进行减速或停止避免碰撞,或集装箱装卸点位置前减速保证准确停靠,主要有防撞减速、交叉口转弯减速和装卸减速3种。
集卡为避免前车减速或停止而产生的碰撞情况,需要根据情况减速或停止,规则表示为

当集卡到达交叉口时,且交叉口有集卡正在进行转弯,集卡需要进行减速慢行或停止,规则表示为

Sn为集卡n与交叉口之间的空元胞数,vc1max为主干道中集卡最大行驶速度,vc2max为交叉口最大行驶速度。
当集卡进入装卸道后,如果前方为装卸点,需要降速慢行保证停止在装卸点位置的精确性,规则表示为

式中:kn为集卡到目标装卸点的元胞数量。
3)交叉口通行原则 当交叉口元胞内没有转弯集卡,直行的集卡可以最大速度通过交叉口。当无人驾驶集卡和人工驾驶集卡同时转弯进入堆场时,根据车辆优先级判断和等待时间综合判断转弯的先后顺序。当需要转弯的集卡和直行集卡通过相同交叉口的时候,计算通过交叉口的时间min(t1,t2),用时短的集卡优先通行,规则表示为
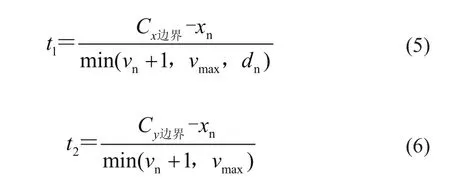
式中:t1为集卡直行通过交叉口的时间,Cx边界为交叉口的横向边界,xn为直行集卡位置,t2为转弯集卡通过交叉口所用的时间,Cy边界为交叉口的纵向边界,yn为直行集卡所在车道序号。
3 实际案例仿真分析
采用国内某水平运输自动化改造的集装箱码头作为仿真案例,码头共布置2个泊位,堆场共分为4个场区32个箱区,采用岸桥+无人驾驶集卡+RTG的装卸工艺,其中岸桥8台,RTG24台。码头装卸船作业采用无人驾驶集卡,港外进行集疏运作业为人工驾驶集卡,分析无人驾驶集卡通行优先级和装卸道容量2类管控条件对无人驾驶集卡作业循环时间的影响,仿真界面如图11所示。
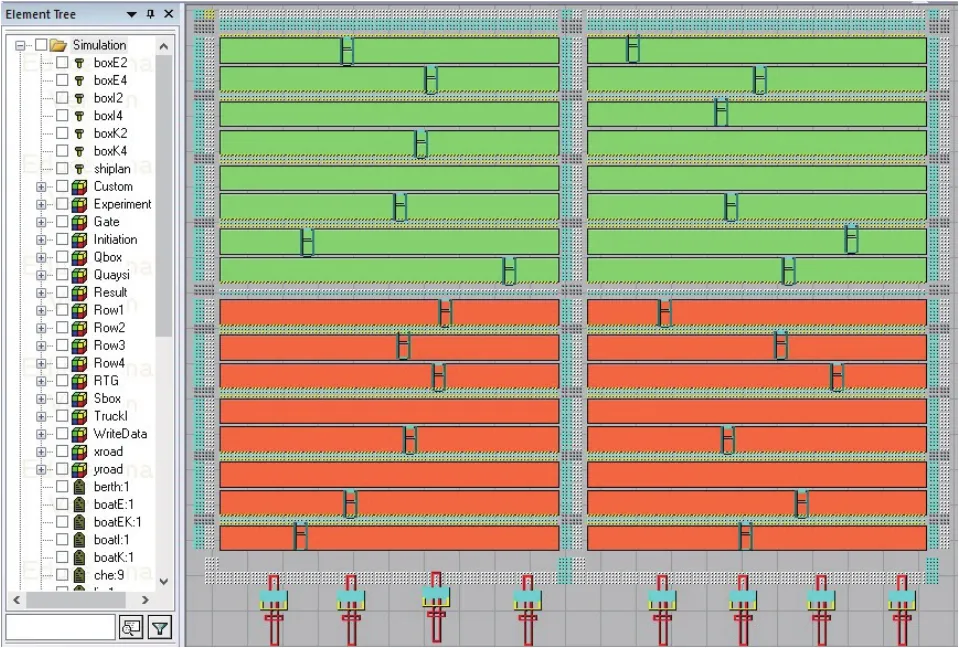
图11 仿真界面图
3.1 仿真参数设置
仿真实验参数依据码头设计资料以及《海港集装箱码头设计规范》进行设置,具体数值如表1~表3所示。仿真工况选取码头作业高峰期,所有装卸设备都参与装卸作业。仿真模型中1个仿真步长时间t= 2 s。
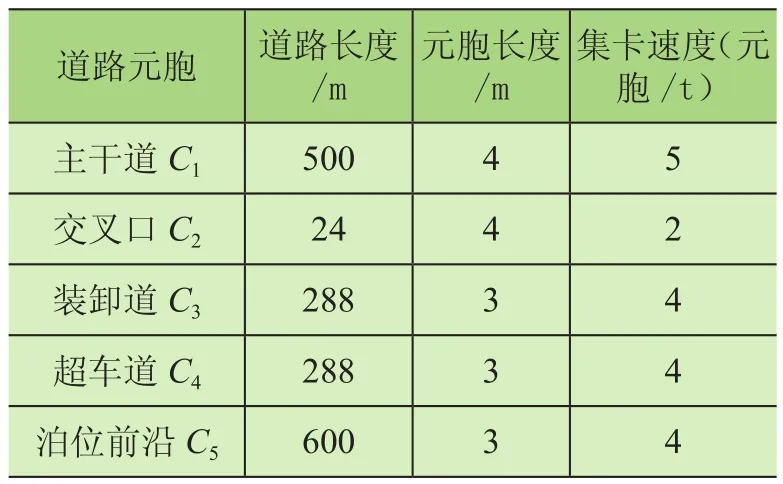
表1 道路元胞参数表
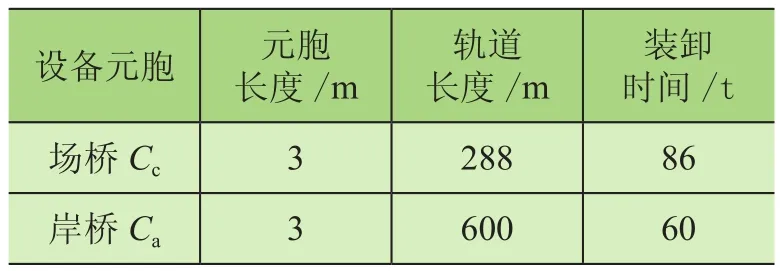
表2 装卸设备元胞参数表

表3 水平运输管控条件与参数
3.2 仿真实验结果与分析
仿真实验选取无人驾驶集卡通行优先级和装卸道容量作为变量条件,记录不同管控方案下无人驾驶集卡作业循环时间(无人驾驶集卡完成装船或卸船任务的平均时间)。无人驾驶集卡通行优先级有高、中、低3种,装卸道容量取1~9,每种方案运行10次,得到的实验结果如表4、图12所示。
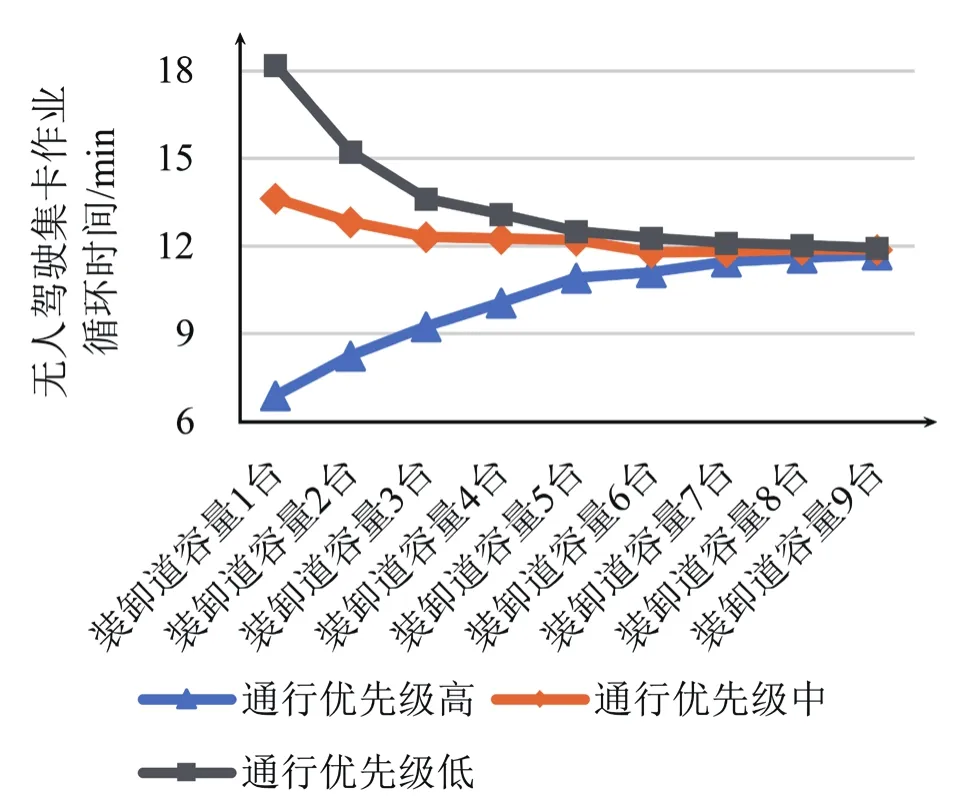
图12 无人驾驶集卡作业循环时间图
结合表4的数据,从图8中可以发现装卸道容量较少时,提高无人驾驶集卡优先级可以有效降低无人驾驶集卡的作业循环时间,说明无人-人工驾驶集卡集中在主干道中,提高无人驾驶集卡通行优先级,可减少无人驾驶集卡在主干道的堵塞和排队时间,从而降低作业循环时间。
随着装卸道容量的增加,装卸道上缓存了原先应该在主干道进行排队的集卡,主干道交通逐渐畅通,当装卸道容量达到8台及以上时,3种通行优先级条件下的作业循环时间几乎一致,说明无人驾驶集卡在主干道排队的情况基本消失,作业循环时间不受通行优先级影响。
此外,当无人驾驶集卡通行优先级为高,且装卸道容量为1时,无人驾驶集卡的作业循环时间是管控方案中最小的仅有6.89 min,说明限制人工驾驶集卡进入堆场作业可以获得最大的无人驾驶集卡作业效率,符合码头在装卸船作业高峰期禁止外集卡进入堆场的措施。因此,通过建模仿真方法,可以分析研究水平运输管控条件对无人驾驶集卡作业循环时间的影响,为集装箱码头水平运输自动化改造和精细管控提供参考。
4 结论
在堆场平行岸线的集装箱码头水平运输自动化改造分析基础上,将元胞自动机与Agent建模方法进行结合,构建了基于CA-Agent的集装箱码头水平运输系统仿真模型。根据码头实际作业参数和工况进行仿真分析,得到装卸道容量和集卡通行优先级与无人驾驶集卡作业循环时间的关系曲线,为集装箱码头水平运输的自动化改造提供科学的管控策略。
