基于慧鱼模型的室内物流机器人系统设计
2021-03-08李云鹏魏羽欣蔺子恒刘一燔黄曦元
李云鹏,刘 楠,魏羽欣,蔺子恒,冯 源,刘一燔,黄曦元
(天津理工大学 机电工程国家级实验教学示范中心,天津 300384)
笔者拟设计一种新型物流机器人补全物流运输最后一步——送货上门。机器人将批量运送快递包裹进入单元楼等建筑物内部各楼层并将包裹运送至各住户门口,大大提高快递派送效率。
1 物流机器人发展趋势
目前,社会零售总额的13%是被网络零售所占据的,这就导致电商物流日渐趋向于自动化。然而未来电商物流的发展方向,很大程度上由自动化程度来决定,并且电子商务整个行业一直在飞快发展。
物流路径随着大数据应用对供应链的改变也会发生改变,这也在快速改变着全国的产业布局。未来直接从工厂发货的这些货物将更受青睐,这做到了“只动数据不动货物”,得到了物流路径最佳方案。
电商物流趋势一定是走共享物流之路,这必将告别现代物流的“农业化时代”,进而走向社会化物流。社会化物流趋势百分之百会减少社会交易成本的浪费。而随着平台经济的发展,“平台+个人”商业模式不断演化,依赖专职的物流从业人员并不能克服这种困难,最主要的原因是“平台+个人”商业模式一直在发展变化,而平台经济的发展也在很大程度上促进这种情况的蔓延。
学生居住的密集度和特殊性决定了大学生是这种消费力量的核心成分。所以,在快递行业,如何解决校园等工作学习场合的快递“末端二百米”问题,如何提高效率和服务水平,是本文研究的中心。
2 机械结构
笔者设计的机械结构主要分为两部分,运送机械及搬运机械臂。
2.1 运送机械
运送机械采用履带式移动平台,底盘有转向灵活、不易打滑、可以稳定的通过楼梯,实现在宿舍楼各楼层之间移动的功能。
由于需要履带式移动平台翻越障,平台的上轮系与下轮系的距离决定了其翻越能力,这就导致平台必须在翻越物之上。履带移动平台制造履带的倾角以便爬上楼梯,由于前角角度关系到平台的翻越能力,所以本文将支撑轮和主动轮进行纵向不同轴设计,如图1所示。

图1 履带受力分析
经模拟仿真分析,40°~45°为最佳前倾角,越障能力最强,经调查楼梯倾角多在40°~50°,故设计为45°倾角,平台高度为模拟台阶两倍(150mm)。
由于慧鱼模型组合包中缺少部分组件,故使用SolidWorks软件自行设计,如图2所示,并由3D打印制造。

图2 履带式移动平台设计模型
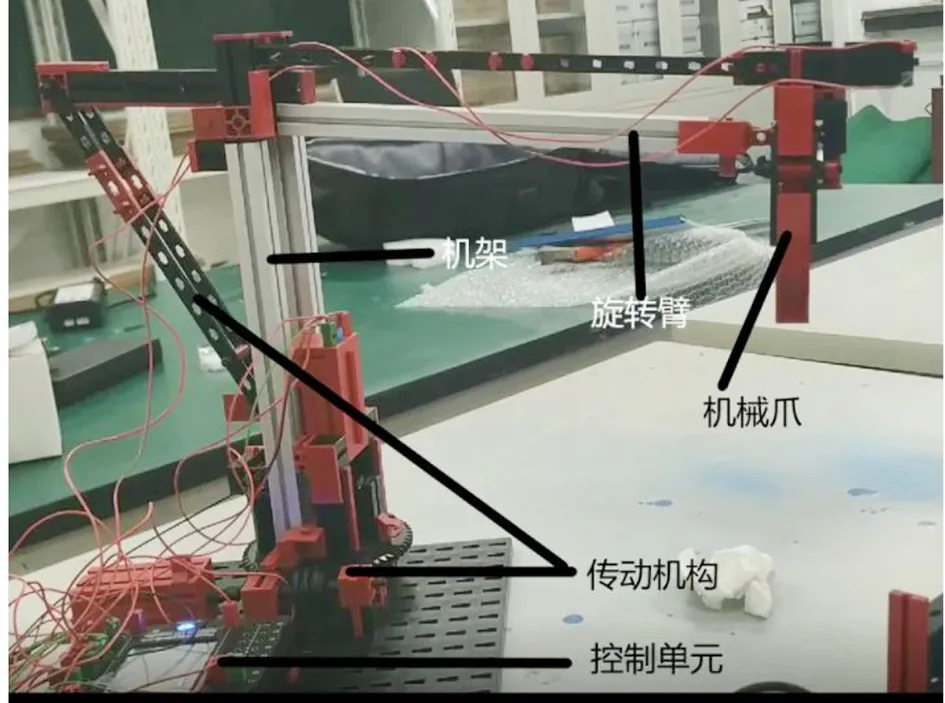
图3 物流机器人机械臂的慧鱼模型
2.2 搬运机械臂
经研究,对于机械臂控制难度增加与自由度的数量是正比例关系,即增加自由度会提高控制难度。不仅如此,自由度的增加还会导致成本的激增,因此在设计机械臂时除考虑本身的强度、刚度等要求外,还考虑了在准确抓取货物搬运至送货地点的同时,尽量减少机械臂的自由度的方案。
笔者设计的机械臂包含主机架、传动机构、旋转臂以及机械爪等核心机构,并设有独立的控制单元,如图3所示。
经研究,机械臂平面旋转传动机构选用蜗轮蜗杆机构。
蜗杆传动具有紧凑的结构、稳定平滑的传动、较高的传动比而噪声和啮合冲击都不大。蜗杆具有自锁性(当啮合轮齿间的当量摩擦角大于导程角时),十分适合物流机器人从货厢取出货物时的功能需求,使货物平稳快速取出精准投放到指定位置。
经研究,机械臂升降传动机构选用丝杠螺母机构与平行四边形平面连杆机构,这是根据物流机器人的工作要求,选择的一种可以将电机、减速装置与螺旋传导一体化集成的机械臂Z轴升降结构。螺旋传动是将旋转运动转化为直线运动,不但可以保证结构自锁,与其他类似的传动形式相比,还具有更简单的结构、更连续平稳的工作能力、更强的承受能力、更高的传动精度、更良好的稳定性,以此获得稳定的升降。结合以上优点,还可以发现丝杠螺母升降结构能够有效降低制造加工难度、节约成本,并且能够同时进行能量和力传递。
平行四边形机构保证机械爪始终保持与平台垂直的状态,使货物始终平稳保持水平状态,便于投放货物,提高精准度。选择平行四边形机构就可以轻松满足需要, 在实现执行器的水平工作的同时节省了一个转动副。经计算平行四边形机构自由度为1(W=3×3-2×4=1), 只需一个主动件,因此选用此机构既减少了能耗又降低了程序复杂度,抓取动作,如图4所示。

(a)旋转 (b)校准
3 控制系统
3.1 控制器(ROBO TXT控制器)
笔者采设计的控制系统采用的是ROBO TXT控制器(见图5)。
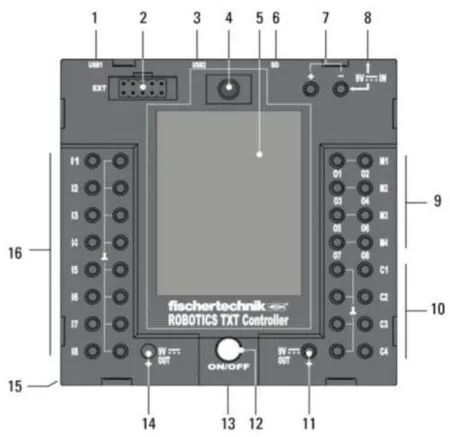
图5 ROBO TXT控制器说明
1.USB-A接口(USB-1);2.扩展板接口;3.Mini USB接口(USB-2);4.红外接收管;5.触摸屏;6.Micro SD 卡插槽;7.9V供电端,充电电池接口;8.9V供电端,直流开关电源接口;9.输出端 M1-M4,或01-08;10.输入端C1—C4;11.9V输出端(正板端子);12.ON/OFF开关;13.扬声器;14.9V输出端(正极端子);15.纽扣电池仓;16.通用输入端11-18
ROBO TXT控制器适用于控制各种慧鱼模型,是“慧鱼创意模型”的重要控制模块,通过USB端口或者通过内置的蓝牙与 Wi-Fi 模块传输软件指令,从而实现慧鱼模型的控制运动过程。
3.2 传感器
笔者设计的物流机器人为了提升物流机器人的行进灵活性,在楼道行进时主要采用光学导引的方式(见图6)前进,在机器人行驶路径上制造明显色差带,通过对光学传感器收集的色差带信号转化为电子信号进行识别,检测是先铺设在地面的色带与物流机器人的相对位置,实现导引前进,而光学导的方式在地面路线设置方便十分简单便捷。

图6 光学引导系统原理
3.3 电机选用
项目组设计的物流机器人重4kg,要求最快运行速度为1m/s,两台电机驱动其行走,最大爬坡角度为5°,电机供电电压为24V。
电机转速要求:
电机转矩要求:
由于整体系统重量为4kg,预估摩擦系数为0.03。
转矩计算:
T=Ff×R
=(0.03+sin5)×4kg×9.8kgm/s2×32.5×10-3m
=100mN·m
但由于需要其分担到两个电机上,此时每个电机转矩为50mNm。
综上初步减速电机参数为:
转矩:50mNm,转速:290rpm。
根据此需求数据本文设计选择了几款符合要求的电机型号(见表1)。
4 控制程序
4.1 ROBO PRO的程序设计(见图7)
在程序控制方面,笔者使用的是慧鱼 ROBO PRO 软件,通过流程图和数字流程图的结合,在使用符合需求的一些程序模板使其控制程序以及流程图和数字流程图可以生成可视化的用户界面,最后将其后台运算的数据转换为控制信号即可实现物流机器人识别和抓取运送等功能的运行。
该控制程序只有一个主程序但是搭配了多个子程序模块。主程序即实现整个存取过程,其包含多个模块,而每个子程序可重复调用,即子程序是完成存取过程中各个子动作的实现。为实现特定功能,在存取的过程中,由主程序可以调取运行子程序模块,每个子程序都有设有固定的参数限制。
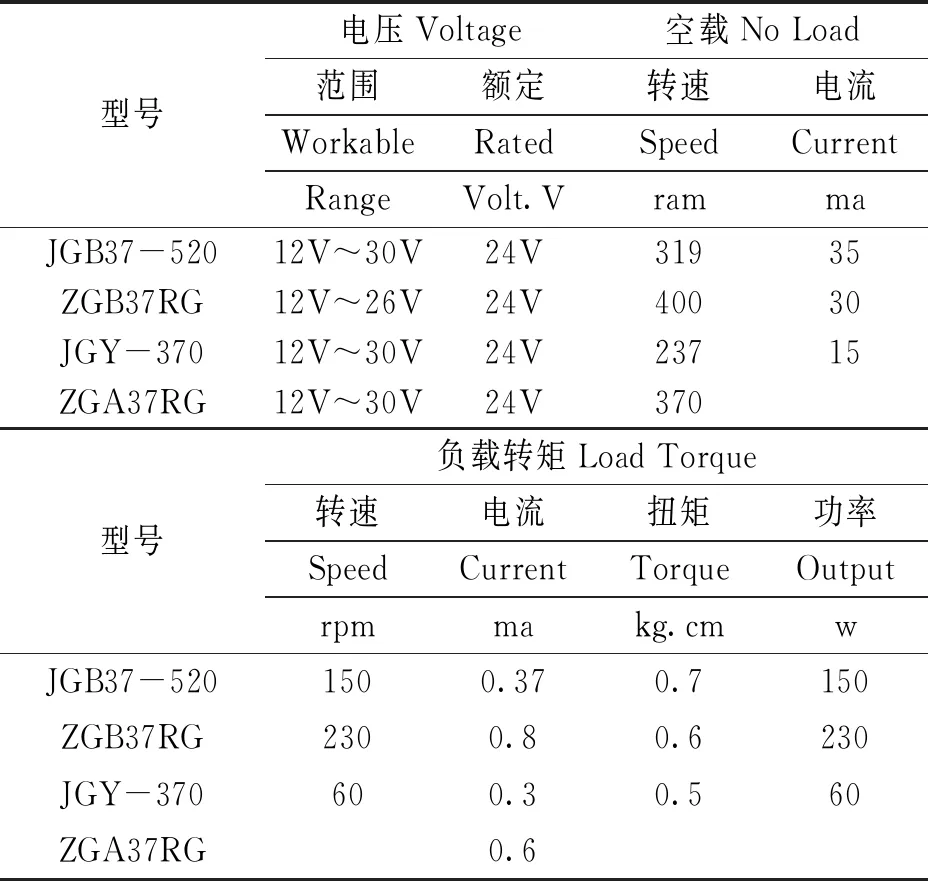
表1 电机选用型号
4.2 程序流程图

图7 程序流程
5 结束语
笔者在研究过程初始阶段就对当今物流体系及环境需求等方面开展研究,确定了针对物流环境的末端配送问题的研究中心,在研究设计前总结了本文研究所需的大量物流行业相关专业知识。研究中期查阅研究讨论了大量机械结构、电气系统及编程思维的相关资料,设计出移动及搬运装置的机械结构、电气元件的选择应用和整体系统的程序流程方案。在研究后期的实验阶段,我们经研究决定使用SolidWorks软件进行模拟仿真以及设计制造模拟环境实验所需的各种部件,并使用3D打印技术制造出实验模型,在研究后期的系统调试阶段经研究使用ROBO PRO软件对物流机器人的控制系统编写程序,并进行实验和调试。
综上所述,所设计出的物流机器人满足设计要求,采用慧鱼模型、三维建模以及3D打印技术和传感器检测技术等技术实现物流机器人的研究制造,要想进一步实现物流机器人的工作需求,需要进行模拟环境测试以及调试来达到预期的效果。
