红外稳定平台装调误差对视线角速度的影响分析
2021-03-06付奎生丁海山
陈 争,付奎生,2,丁海山
系统与设计〉
红外稳定平台装调误差对视线角速度的影响分析
陈 争1,付奎生1,2,丁海山1
(1. 中国空空导弹研究院,河南 洛阳 471009;2. 航空制导武器航空科技重点实验室,河南 洛阳 471009)
框架式稳定平台中的装调误差影响视线角速度的测量精度。给出了框架轴系偏差的数学描述,在此基础上研究了轴系偏差和陀螺敏感轴交叉耦合情况下三自由度框架式红外稳定平台对视线角速度的计算方法。并比较了这两类装调误差对视线角速度测量精度影响的大小。仿真结果表明,通过对装调误差补偿,视线角速度的测量精度可显著改善。所得结果对新型框架式稳定平台系统的误差指标分配具有重要的参考价值。
稳定平台;装调误差;框架轴系;视线角速度
0 引言
框架式稳定平台系统近年来发展迅速,广泛应用于飞行器上的目标探测系统、精确制导武器的导引系统等。三自由度框架式红外稳定平台实现惯性空间稳定和对目标跟踪的同时,还可以直接测量制导系统所需的视线角速度信息[1]。三自由度稳定平台在结构上由3个单轴运动框架复合而成,机械装配中产生的装调误差造成框架轴系偏差[2-3]、红外探测器位姿偏差以及陀螺敏感轴的交叉耦合[4-5],使得基座角运动的耦合更加复杂[6],对测量视线角速度带来不利的影响。
文献[7]研究了仅陀螺敏感轴交叉耦合情况下视线角速度的计算。所得结果是在框架轴系正交的假设下得到的。而实际系统中框架的装配必然会存在一定装调误差。本文系统研究了框架、陀螺和红外探测器均存在装调误差时,三自由度框架式红外视线角速度的计算方法,建立基于三轴稳定平台的轴系偏差的数学模型,分析了装调误差对视线角速度计算的影响,并进行仿真验证。
1 稳定平台系统
三自由度框架式红外稳定平台系统的示意图如图1。图中,-bbb表示载体坐标系。载体坐标系的原点取为稳定平台回转中心且坐标系和载体固连。
框架式红外稳定平台系统一般将探测成像系统和速率陀螺安装在稳定平台上,稳定平台固定在内环框架上,成为内环框架的负载。内环框架和稳定平台组成内环本体组合,通过内环框架转轴固定在中环框架上,成为中环框架的负载。中环框架和内环本体组合通过中环框架转轴固定在外环框架上,成为外环框架的负载。外环框架转轴架固定在红外稳定平台的载体上。外环框架相对载体可以做滚转运动;外环框架处于零位时,中环框架相对载体可以做偏航运动;外环框架和中环框架处于零位时,内环框架相对载体可以做俯仰运动。通过内环、中环、外环3个框架的运动合成,可以实现稳定平台在惯性空间中绕回转中心转动。
2 轴系偏差建模
针对三自由度红外稳定平台的结构特点,除了前面定义的载体坐标系-bbb,再建立外环坐标系-ooo、中环坐标系-mmm、平台坐标系-ppp和探测坐标系-ddd。这4个坐标系原点均为稳定平台回转中心,其中,外环坐标系轴和外环框架转轴固连;中环坐标系轴与中环框架转轴固连;平台坐标系轴和内环框架转轴固连;探测坐标系和探测器光敏面固连,其轴对应光敏面的中垂线(即探测成像系统光轴),轴和轴分别对应探测器光敏面的行和列。
在设计的理想状态下,探测成像系统光轴与内环框架转轴、内环框架转轴与中环框架转轴、中环框架转轴与外环框架转轴应分别正交,而外环框架转轴和载体纵轴完全重合。探测坐标系和平台坐标系重合且各框架处于零位时,4个坐标系和载体坐标系重合。记外环框架角为w,中环框架角为z,内环框架角为n,角度正负按右手规则确定,那么各坐标系相互间的变换关系如图2所示。
实际装配时,框架轴系不可能做到零误差。本文描述轴系装调误差的参数为1、1、2、2、3、3、4、4和4。其中,1为外环框架转轴在载体坐标系面的投影与载体系轴的夹角;1为外环框架转轴与载体系面的夹角;2为中环框架转轴在外环坐标系面的投影与外环系轴的夹角;2为中环框架转轴与载体系面的夹角;3为内环框架转轴在中环坐标系面的投影与中环系轴的夹角;3为内环框架转轴与中环系3面的夹角;4为探测器光敏面中垂线在平台系面的投影与平台系轴的夹角;4为光敏面中垂线与平台系面的夹角;4和4、4一起构成一组平台系到探测系的欧拉角。角度正负号按右手规则确定。当这些装调误差存在时,各坐标系相互间的变换关系如图3所示。

图3 框架轴系偏差时各坐标系之间的变换关系
3 视线角速度的计算






对于三自由度框架式红外稳定平台系统,稳定平台上正交安装了偏航/俯仰陀螺分别测量平台相对惯性空间的偏航/俯仰角速度;外环框架上安装有外环陀螺,可以测量外框架相对惯性空间的滚转角速度。理想情况下,稳定平台偏航/俯仰陀螺的敏感轴分别平行于平台坐标系的轴和轴,外环陀螺敏感轴与外环坐标系轴平行。这里仍用第2章轴系偏差建模的方法描述陀螺的装配误差,记误差参数为5、5、6、6、7、7。其中,5为外环陀螺敏感轴在外环系面的投影与外环系轴的夹角;5为外环陀螺敏感轴与外环系面的夹角;6为中环陀螺敏感轴在平台系面的投影与平台系轴的夹角;6为中环陀螺敏感轴与平台系面的夹角;7为内环陀螺敏感轴在平台系面的投影与平台系轴的夹角;7为内环陀螺敏感轴与平台系面的夹角。角度正负号按右手规则确定。那么在考虑轴系偏差情形下,陀螺的输出和外、中、内环框架的角速度满足下式:

将式(3)代入式(2),得到视线角速度在探测坐标系中的测量计算公式为:

最后将其按图3的坐标变换关系可得视线角速度在载体系中的测量计算公式为:

当各误差参数都取零时,式(4)即蜕化成:

将其坐标变换到载体系可得:

也即理想情况下,三自由度框架式红外稳定平台系统稳定跟踪目标时,稳定平台上正交安装的偏航/俯仰陀螺可以直接测量出视线角速度。特别当框架轴系误差参数取零时,式(4)即蜕化成文献[7]中的结果。因此,式(4)也可以认为是对装调误差进行补偿,而且较文献[7]中的结果更具有一般性。
4 仿真分析

图4 陀螺的输出
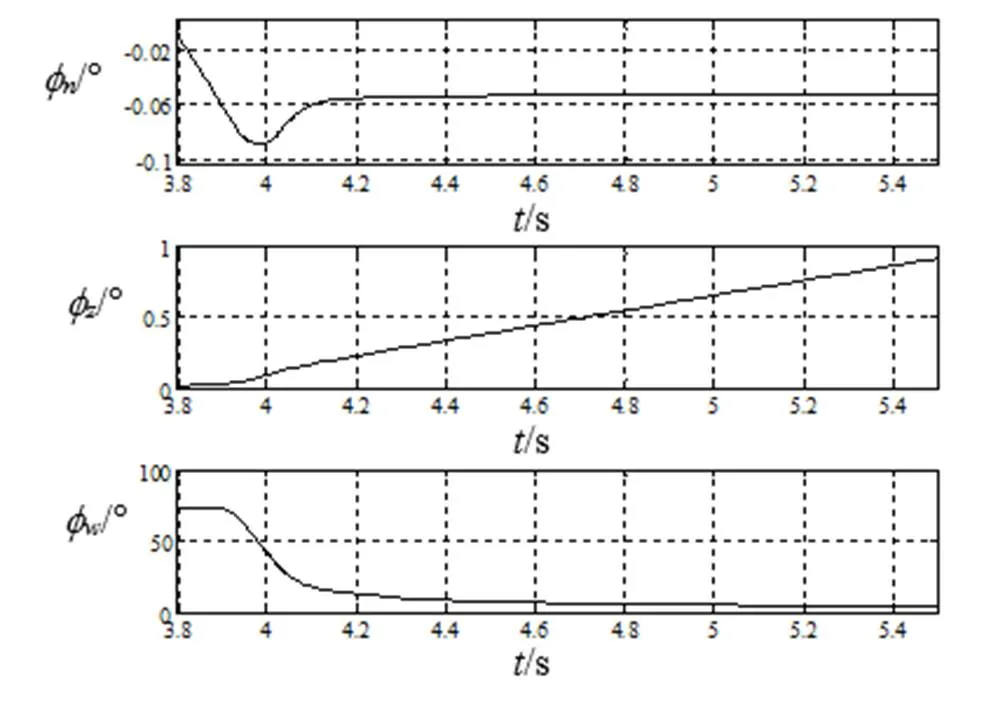
图5 框架角曲线

表1 装调误差参数设置
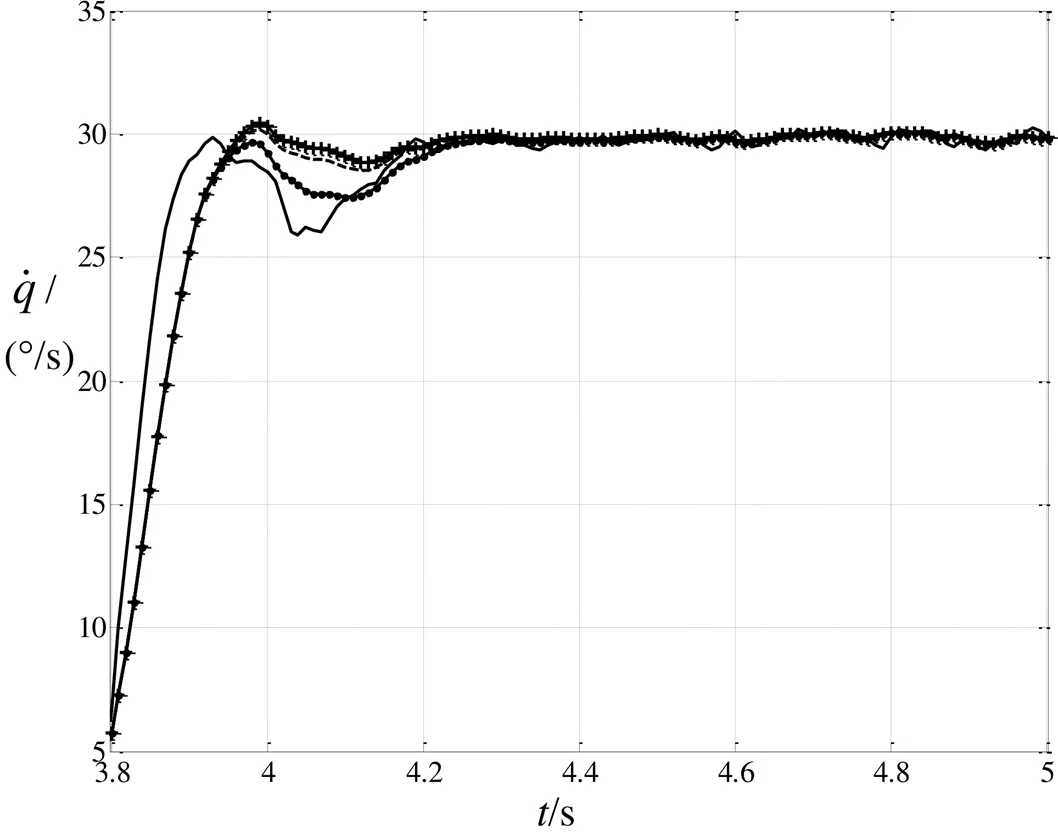
图6 仿真结果比较图

图7 仿真结果比较(局部放大)
仿真试验结果表明,对装调误差进行补偿,可以提高视线角速度测量的精度。忽略装调误差时,测量计算的视线角速度较理论值最大偏差为4.08°/s;仅对框架轴系误差补偿时,视线角速度最大偏差减小到2.53°/s;仅对陀螺安装误差时,视线角速度最大偏差减小到1.49°/s;综合考虑各装调误差进行补偿,视线角速度最大偏差进一步减小到1.18°/s。总体来看,陀螺敏感轴交叉耦合对视线角速度精度的影响较框架轴系误差更显著。
5 结论
本文系统研究了框架和陀螺均存在装调误差时,三自由度框架式红外视线角速度的计算方法,并进行仿真分析。结果表明,在计算视线角速度时如果对误差进行补偿,可以提高视线角速度的测量精度。在提高线角速度测量精度方面,补偿陀螺敏感轴交叉耦合的效果比补偿框架轴系偏差更显著。所以陀螺敏感轴交叉耦合对视线角速度的影响在各装调误差中最大。此结果对新型框架式稳定平台系统总体设计时的误差指标分配有重要的参考价值。
[1] 张平, 董小萌, 付奎生, 等. 机载/弹载视觉导引稳定平台的建模与控制[M]. 北京: 国防工业出版社, 2011.
ZHANG Ping, DONG Xiaomeng, FU Kuisheng, et al.[M]. Beijing: National defense industry press, 2011.
[2] 王涛, 朱明超, 訚胜利, 等. 稳定平台轴系精度对视轴指向误差的影响分析[J]. 红外与激光工程, 2011, 40(11): 2265-2269.
WANG Tao, ZHU Mingchao, YIN Shengli, et al. Analysis of LOS pointing error derived from precision of shafting in stabilization mechanism[J]., 2011, 40(11): 2265-2269.
[3] 李岩, 范大鹏. 视轴稳定平台的装配误差机理分析与仿真[J]. 中国惯性技术学报, 2007, 15(1): 35-38.
LI Yan, FAN Dapeng. Analysis and simulation on assembling-error mechanism for gyro-stabilization platform[J]., 2007, 15(1): 35-38.
[4] 李岩, 张智永, 范大鹏. 陀螺安装误差影响视轴稳定平台精度的机理研究[J]. 光电工程, 2007, 34(9): 10-15, 29.
LI Yan, ZHANG Zhiyong, FAN Dapeng. Principle of the effect of gyro misalignment on the stabilization platforms accuracy[J]., 2007, 34(9): 10-15, 29.
[5] 付奎生, 孟卫华. 三轴稳定跟踪平台旋转耦合问题的分析与改进[J]. 航空兵器, 2010(4): 7-9.
FU Kuisheng, MENG Weihua. Analysis and improvement of channels coupling problem of three-axis stabilized and tracking platform[J]., 2010(4): 7-9.
[6] 张延顺, 朱如意, 房建成. 航空遥感用惯性稳定平台动力学耦合分析[J].中国惯性技术学报, 2011, 19(5): 505-509.
ZHANG Yanshun, ZHU Ruyi, FANG Jiancheng. Analysis on dynamics coupling of inertial stabilized platform for aerial remote sensing[J]., 2011, 19(5): 505-509.
[7] 熊伟, 丁海山, 付奎生. 陀螺敏感轴交叉耦合对视线角速度的影响分析[J]. 计测技术, 2012, 35(5): 8-12.
XIONG Wei, DING Haishan, FU Kuisheng. Analysis of influence of the cross sensitive axes on the angular rate of stabilized platform[J]., 2012, 35(5): 8-12.
Analysis of the Influence of Installation Errors of an Infrared Stabilized Platform on Line-of-sight Angular Velocity
CHEN Zheng1,FU Kuisheng1,2,DING Haishan1
(1.,471009,;2.,471009,)
Installation errors of a stabilized platform with a frame structure affect the calculation accuracy of the line-of-sight (LOS) angular velocity. Mathematical descriptions for the axis system deviation of frames are given. Based on these, calculation methods for a three degree- of-freedom infrared stabilized platform are studied under the conditions of axis system deviation and cross coupling of sensitive axes of gyros. The influences on the measuring accuracy of LOS angular velocity caused by these two kinds of installation errors are compared. It is shown by simulation results that compensating for installation errors can effectively improve the measuring accuracy of LOS angular velocity. The results are important for error index decomposition for the design of a late-model-stabilized platform with a frame structure.
stabilized platform, installation error, axis system, LOS angular velocity
TJ765.3
A
1001-8891(2021)02-0110-06
2020-06-11;
2021-01-25.
陈争(1985-),男,工程师,硕士,主要研究方向为稳定平台式红外目标位标器总体设计。E-mail:water5218@qq.com。
中国空空导弹研究院创新基金(CKJ0000)。
