移动对象轨迹预测
2021-03-05索永峰张振烨杨神化陈国权
索永峰,张振烨,杨神化,陈国权
(集美大学航海学院,福建 厦门 361021)
0 引言
随着各种便携式移动终端的普及,理解并准确预测移动目标轨迹在交通安全和增值服务应用等方面越来越得到重视,移动对象轨迹预测研究也随之成为智能交通与智慧城市研究领域的热点。本文从物理机理模型、移动对象行为模型和移动对象间交互模型[1]三个方面来概述轨迹预测模型。
1 基于物理机理的轨迹预测模型
基于物理机理的模型根据移动对象的物理原理来构建,根据物理动力学或运动学模型对未来轨迹进行预测。
1.1 动力学模型
动力学模型需要考虑移动对象内部的参数及其运动原理,针对不同类型的移动对象,其内部结构不相同,运动原理也不相同。文献[2]给出了船舶刚体动力学模型,船舶动力学模型将船舶当作刚体,利用动量定理来描述船舶受力后位置和运动姿态的变化;文献[3]融合驾驶意图和运动模型对前车轨迹进行预测,利用序列二次规划和贝塞尔曲线规划车辆运动轨迹;文献[4]结合车辆动力学特征和道路几何模型,在车辆处于响应状态时采用图像处理机制对道路状况进行算法补偿,从而对车辆前方的物体避免碰撞进行轨迹预测。
基于动力学模型的轨迹预测被广泛应用于控制领域,由于其计算效率较低,故用于轨迹预测的动力学模型较为简单,主要作为辅助手段使得轨迹预测更加准确。动力学模型需要较强的专业知识支撑,此类方法在实际应用中效果往往比仿真结果差。
1.2 运动学模型
运动学模型主要考虑移动对象运动状态,并且能控制移动对象的运动状态。文献[5]假定船舶在匀速行驶的情况下,建立船舶定位和航迹预测的数学模型,采用卡尔曼滤波算法对船舶数据进行处理,从而实现船舶航迹状态估计;文献[6]利用卡尔曼滤波对数据进行降噪,然后建立船舶运动状态方程;文献[7]利用物理模型和意图模型相结合的方法对车辆进行综合轨迹预测,该研究考虑了运动学模型,并采用卡尔曼滤波器引入预测不确定性,实现短期轨迹预测;文献[8]将车辆的运动分解为横向与纵向,车辆纵向位置可由车辆加速度积分表示,横向运动主要跟踪中心线运动,实现概率轨迹预测。
运动学模型更简单且具有通用性,通过建立不同的模型能够涵盖大多数运动情况,但模型建设过程中需要大量参数假设,需对运动过程有全面的把握。
2 基于移动对象行为的轨迹预测模型
移动对象行为的模型依据先验信息来预测未来时间移动对象的运动特征,其可分为数据轨迹预测、意图识别轨迹预测和其他三个部分。
2.1 数据轨迹预测
数据轨迹预测核心是挖掘移动对象运动轨迹特征,将移动对象轨迹与历史轨迹相匹配,找出最相似的轨迹路线,对未来运动轨迹进行预测。
2.1.1 基于统计方法的轨迹预测
统计方法轨迹预测是将轨迹数据看作符合特定分布的序列数据,并基于统计学方法对轨迹数据进行拟合,实现轨迹预测。
1)差分自回归移动平均模型(autoregressive integrated moving average,ARIMA)。ARIMA通过数据的历史值、历史误差以及其他时间序列的当前值和历史值的线性组合来预测未来的时间序列。文献[9]使用ARIMA建立客户购物行为时空模型,随着数据量的增加,ARIMA模型的预测效果会更准确。文献[10]使用差分自回归滑动平均模型预测不同路段车流量,并结合高斯混合模型构建混合概率模型,通过动态权重组合子模型实现轨迹预测。
ARIMA为时间序列分析算法,能够较好解决轨迹预测问题。对于非线性轨迹,可以控制差分阶数来处理,其缺点是对于长距离轨迹预测效果较差。
2)卡尔曼滤波器(Kalman filter,KF)。KF能在不确定性因素的情况下,估计系统状态。扩展卡尔曼滤波(extended Kalman filter,EKF)是标准卡尔曼滤波在非线性情形下的一种扩展形式。无损卡尔曼滤波(unscented Kalman filter,UKF)是对KF的改进,通过采样和计算均值的方法,使得算法能够处理非线性信号。文献[11]使用多项式KF拟合船舶航迹分段多项式特征,使用多项式拟合航迹,获取初始状态方程与观测方程,然后进行预测,将预测值与真实值比较,通过迭代更新航迹点误差协方差矩阵,完成轨迹预测;文献[12]结合车辆运动学模型,提出最大似然多重模型滤波器,针对模型既非线性又不可微特征,使用UKF进行轨迹预测,并通过最大似然将各个模型相关估计结合;文献[13]运用UKF,结合船舶欠驱动动态运动模型,在线预测船舶航行期间动态位置。
KF在计算过程中所占存储空间较少,能够实现短时期轨迹的预测,但模型初始状态及假设对于预测性能非常重要。目前KF在机器人导航、图像识别等方面均有应用。
3)隐马尔可夫模型(hidden Markov model,HMM)。即事物当前状态仅与前n个状态相关,能够对时间序列数据进行建模。文献[14]通过聚类方法将时空序列划分,对划分后的数据进行HMM训练,利用已知时空序列和相应区域模型,通过维特比算法计算最佳隐状态序列,再结合转移矩阵做出轨迹预测;文献[15]使用HMM描绘轨迹点之间的状态转换,从而进行轨迹预测,在动态更改移动对象速度的情况下,模型能够自动调整重要参数,以解决不连续隐藏状态链和状态保留问题;文献[16]使用HMM挖掘车辆历史轨迹隐藏状态序列,然后通过维特比算法寻找与轨迹相对应的序列。
HMM结构简单,易于理解,对时序数据进行建模有一定优势。此模型在语音识别,语言处理等方面均有应用,但对长距离预测效果不佳且有一定计算量。
4)高斯过程回归模型(Gaussian process regression,GPR)。高斯过程是具有联合高斯分布的随机变量集合,回归过程获得观测值与预测值的联合先验密度,通过协方差矩阵来计算预测值的后验分布。文献[17]将船舶运动分解为横向与纵向,横向采用高斯过程对运动不确定性进行建模,纵向由加速度进行估计,预测轨迹由评估均值和协方差矩阵进行预估,描述船舶侧向位置及其不确定性;文献[18]以时间为自变量,将轨迹视为一维高斯过程,通过白噪声驱动的非线性时变随机微分方程定义先验连续时间,并结合使用动力学模型平滑轨迹估计;文献[19]使用GPR对已有船舶航行轨迹进行仿真模拟,其中核函数选择平方指数协方差,利用极大似然法求得超参数,从而实现轨迹的预测。
GPR适用性较强,易于理解,但计算量较大,且随着预测时间的推移,预测结果精确度会大幅下降。
5)高斯混合模型(Gaussian mixture model,GMM)。GMM由多个基于高斯概率密度函数组合而成,对于一个运动模式,高斯混合模型能够推算其联合概率分布,以历史运动模式作为输入条件,预测移动对象未来运动轨迹。文献[10]使用最大期望法计算k个高斯模型参数,通过重复迭代实现参数收敛,得到高斯分量回归函数,最后加权得到轨迹概率模型;文献[20]提出基于语义轨迹的行人位置预测方法,基于GMM模型从原始轨迹中提取中途停留点,并在中途停留点上标注语义信息,通过概率模型预测位置上注释最可能的语义;文献[21]提出GMM和变高斯混合模型,它是传统GMM的贝叶斯处理,使得模型显示出更好的泛化能力。
GMM有更加广泛的适用性,结合其他算法会有更加出色的表现,但是相应的计算成本较高。
6)贝叶斯网络(Bayesian network,BN)。BN模拟人类推理过程中因果关系不确定性处理的模型,其网络拓朴结构为有向无环图,其中节点表示随机变量,连接节点箭头代表两个随机变量具有因果关系。文献[22]基于BN预测不确定性下的移动对象未来轨迹,根据需要确定分析区域,将区域模式与BN进行转换,能够推理出在当前观测区域下的未来区域状态概率;文献[23]介绍了一种基于BN的机动概率分布、轨迹预测和关键性评估集成的方法,此方法先通过BN为交通场景中的每辆车推断出机动决策分布,随后采用某一特定机动决策的轨迹预测模型预测车辆位置;文献[24]通过混合贝叶斯网络实现推断驾驶员操纵意图的预测框架,操纵意图推论和轨迹假设执行的操纵分类相结合,对车辆未来驾驶行为做出预测。
BN能将专家知识整合到结构中,易于理解和验证,但模型的性能对建模的假设具有敏感性且计算成本较高。
2.1.2 基于深度学习方法的轨迹预测
深度学习概念源于人工神经网络,大量的模拟神经元组合成一个复杂的系统,通过训练神经元之间的权重来实现神经网络的自学习和自适应的能力。
1)多层感知机(multi-layer perception,MLP)。MLP由输入层、隐藏层和输出层构成,对MLP网络输入多个历史时间戳的轨迹数据来预测未来一段时间的轨迹。文献[25]构建人工神经网络预测车辆的未来轨迹,此模型输入目标车辆纵向和横向相对速度及不同路况下车辆位置,以实现车辆的轨迹预测;文献[26]使用BP神经网络对驾驶员的意图进行建模,识别与驾驶员的意图相对应的方向盘角度,将获得的转向角用作卡尔曼滤波器模型的控制矩阵,通过该矩阵预测车辆的轨迹;文献[27]使用粒子群优化的神经网络(partical swarm optimizer,PSO-BP)对船舶航向进行预测,并结合自适应粒子群算法解决BP神经网络连接权值陷入局部最优问题,提高模型全局搜索能力。
MLP能学习数据中非线性关系,但隐藏层层数及隐藏层节点数要自己设定。不同层数与节点数会给最后结果带来比较大的影响,且模型在优化参数过程中易陷入局部最小值。
2)循环神经网络(recurrent neural networks,RNN)。RNN是深层次的神经网络模型,其定向循环对输入数据具有一定的记忆功能,RNN中隐藏层间的节点是有连接的,通过隐藏层间的相互连接实现记忆功能。文献[28]基于RNN进行车辆障碍物路径预测,通过路径不确定性估计来预测未来轨迹;文献[29]提出基于RNN未来轨迹预测框架,将静态和动态场景上下文与深层逆最优控制框架结合,有效地解决预测任务中的不确定性,实现对复杂场景中多对象的未来预测;文献[30]在预测过程中考虑交通状态,使用意图递归神经网络预测城市车辆轨迹,意图机制使得模型能够合并异构输入源从而进行轨迹预测,将交通网络流量状态数据和车辆轨迹数据作为模型的输入,以提高预测精度。
RNN对于序列数据的拟合处理能力更有优势,短期预测有不错的效果,但由于其结构特点,RNN存在记忆快速衰弱这一问题,随着输入序列增长会造成梯度爆炸或者消失现象。
3)长短期记忆网络(long short-term memory,LSTM)。LSTM对RNN进行了改良,以克服记忆快速衰弱这一缺点,其记忆模块包含一个核心信元、三个用于控制信息流入存储单元和从单元到网络的门(输入门、输出门和遗忘门);文献[31-32]基于AIS数据和LSTM对船舶航行轨迹进行预测;文献[33]将空间交互嵌入到LSTM模型中,以隐式表述相邻车辆间的交互,具有更高的轨迹预测精确度;文献[34]提出双向长短期记忆网络,对车辆进行长距离轨迹预测,此算法在强交互驾驶环境中有较好的预测效果;文献[35]提出基于LSTM的分层网络,通过使用三种不同的LSTM来捕获人员、社交和场景范围信息,多个体之间的交互以及静态场景信息使得该方法对行人的轨迹预测更加准确。
LSTM利用门的状态控制历史信息,在轨迹预测中能够输入比普通循环网络更长的时间序列,且缓解梯度消失或爆炸问题,但隐藏层数和连接权值初始值的选择会影响最后轨迹预测的效果。
4)门控递归单元网络(gate recurrent unit,GRU)。GRU是对LSTM的简化,GRU网络包含了更新门与重置门,也可解决普通RNN梯度消失或者爆炸的问题。文献[36]通过船舶历史轨迹数据集对GRU进行训练,利用迭代预测下一时刻船舶轨迹信息,实验显示,GRU比LSTM耗时更短,预测精确度也能与之相媲美;文献[37]通过小区序列推导,将离散的小区序列表示空间连续GPS轨迹,然后利用GRU对其进行训练,预测行人未来位置;文献[38]通过GRU和主成分分析对无线区域进行设备移动性预测,通过训练GRU以开发可预测的设备移动性模型,此模型能够在动态环境中对设备进行跟踪和轨迹预测。
GRU能较好地对时间序列数据进行预测,相比于LSTM,其所需的训练时间更短,能够更好地对轨迹进行预测。
5)自动编码器(auto encoder,AE)。AE包括编码与解码两个过程,能够提取数据中的隐含特征,同时用新特征重构原始输入数据。文献[39]提出双重线性AE预测船舶未来轨迹,预测所选类别中船舶轨迹,通过船舶未来可能的轨迹潜在分布,预测多条船舶轨迹及其不确定性;文献[40]利用分层AE对行人进行路径预测,首先在底层学习局部运动块,提取局部特征,再利用解码器获得更多全局性运动特征;在高层推理中,利用贝叶斯网络计算时间上轨迹元素的概率分布,实现长期路径预测;文献[41]采用LSTM编码器分析历史轨迹数据模式,并结合解码器生成未来轨迹序列,其最终结果会给出多条轨迹预测假设。
自动编码器能够提取深层次的数据特征,但需要准确的把握深层次数据特征的提取,过度提取会得到无用数据特征,使得模型效果不佳。
2.1.3 混合模型轨迹预测
混合模型将多种模型组合在一起,针对模型的缺点,用其他模型或者算法来弥补,达到更好的轨迹预测效果。文献[7]将物理模型和意图模型相结合对车辆进行综合轨迹预测,使得轨迹预测效果更准确;文献[42]基于GMM识别不同的驾驶方式,并基于LSTM模型的个性化联合时间序列建模方法来预测轨迹,此模型能基于有限车辆动态信息对前车进行精确的轨迹预测;文献[43]基于多模型UKF的动态贝叶斯网络(dynamc Bayesian network,DBN)对驾驶员意图估计和多主体轨迹预测,DBN将交通状况发展建模为一个包含多个交互对象的随机过程,每个对象的轨迹取决于当前环境以及对象的路线和机动意图,所有交通参与者的离散路线和操纵意图的每种可能组合形成了DBN,训练后的网络可用于轨迹预测。
2.2 意图识别轨迹预测
基于意图识别的轨迹预测是对驾驶员行驶意图进行估计,再对运动轨迹进行预测,其核心思想是定义有限的行为集合(换道,语义特征等),然后再根据移动对象的特征对未来行为分类。文献[25,43]基于DBN的驾驶员意图估计,实现长距离轨迹预测;文献[34]利用LSTM模块学习驾驶员行为的深层时空特征,用于驾驶员意图识别;文献[44]提出“高级轨迹”和“低级驾驶特征”两个类别,“低级驾驶特征”与车辆动力学有关,表示短期驾驶行为,“高级轨迹”反映驾驶员长期行为信息的车辆轨迹,该算法可自动学习驾驶员的深层行为,如驾驶偏好,转弯模式等;文献[45]提出基于条件或变换自动编码器的车辆轨迹预测模型,根据对驾驶员潜在意图估计,实现具有可解释性的多模式轨迹预测;文献[46]提出基于语义意图和机动方式预测方法,利用深度神经网络制定概率框架,该框架可预测在各种驾驶情况下所选车辆可能的语义意图和机动方式,估计周围车辆的意图,最终实现未来位置及相应时间的预测。
此类算法主要利用轨迹数据中轨迹点存在的上下文关系特性,实现意图识别,长期轨迹预测效果较好,对未来轨迹有整体的把握,但需要结合路网和卡口语义信息。
2.3 其他
2.3.1 Prefix Span轨迹预测
Prefix Span算法即前缀投影的模式挖掘,能够挖掘频繁序列模式,其目标是挖掘满足最小支持度的频繁序列。文献[47]定义位置项目时间序列描述访问者的时空行为,将位置、项目和时间间隔信息同时纳入序列,开发LIT-Prefix Span挖掘算法,以发现频繁顺序模式,为用户提供有效的移动路径;文献[48]提出Prefix TP轨迹预测算法,首先在数据集上提取轨迹数据并且进行轨迹分割,形成统一格式的轨迹数据,然后对轨迹数据进行特征点提取,调整数据,得到轨迹序列数据,接着对轨迹序列数据进行频繁轨迹挖掘,轨迹预测过程简化为对频繁轨迹的匹配和查找。
Prefix Span能充分利用训练的数据集,计算速度较快且预测精确度较好,作频繁序列模式挖掘的时候效果好,若序列数据集较大,项数种类较多时,运行所耗时间较长。
2.3.2 主题模型轨迹识别
主题模型结合语义转换和构建主题模型来探索潜在的运动模式,它能够较好描述相应文本的特征,被广泛用于文本中提取主题信息。文献[49]基于STMaker语义轨迹将轨迹采样点与语义实体对齐,自动提取轨迹重要语义行为,将选定不规则的特征值转换为可读性和信息性的短语,并通过简短的可读文本来总结行为;文献[50]运用语义转换和主题模型(LDA)来探索船舶轨迹动机,把航迹转换为可用文本后,使用主题模型捕获轨迹文本间的语义关系并检测文档主题,最后借助可视化展现轨迹特征,以便后续轨迹预测。
语义轨迹有助于提高轨迹数据的可读性,但只显示空间轨迹信息,而不显示时间轨迹信息。主题模型能计算出主题对于移动特征的概率分布,能充分识别移动个体的机动性,此方法虽没有直接联系到轨迹预测,但值得后续的研究。
3 基于移动个体间交互的轨迹预测模型
基于个体间交互的预测模型是将自身和周围个体看作相互影响的实体,将移动个体间的相互关系考虑到运动轨迹预测中,发现其中隐藏的轨迹特征。
3.1 基于博弈论的交互式行为预测
博弈论能够表达多个对象之间的交互,并求出期望的最优解。文献[51]提出博弈论动态环境协同驾驶预测与规划框架,对场景中所有车辆进行交互感知运动预测,捕获车辆之间复杂的相互作用,从而在更长时间内预测车辆行为;文献[52]提出基于博弈论和HMM的交互式行为预测方法,在充分考虑车辆之间的相互作用的基础上预测驾驶员意图,建立 GMM-HMM模型,通过车辆历史轨迹识别驾驶员行为,通过计算每种情况下的车辆前行驶空间、碰撞风险和舒适度损失,设计收益函数,对驾驶员的意图进行建模,此模型可较早地预测交通车辆的未来行为。
在移动个体交互过程中,存在相互影响和相互依赖的关系,博弈论能够把握多个个体间的相互关系,但对计算的要求较高,且计算量大。
3.2 移动个体与空间交互的路径预测
对环境和对周围障碍物的有效了解对于智能系统在复杂场景中实现高质量的轨迹预测至关重要。文献[29]的场景建模由语义元素和动态参与者组成,基于图像特征或其他传感数据获得参与者和场景语义元素,将未来预测公式转化为各个目标在未来某时刻的位置;文献[35]基于LSTM,考虑社交领域和场景布局的影响,从人员、社会和场景三个角度模拟在社会场景下的人与人之间的互动,并预测未来行人轨迹;文献[53]提出用于概率轨迹预测的神经网络系统,此系统综合考虑了静态上下文信息和多个实体之间相互作用以及可行性约束,通过空间学习和最小化变异散度的优势来近似数据分布,从中采样现实和多样的轨迹假设,此模型能够预测在高交互场景下行驶的公路车辆运动的任务。
3.3 基于社交的人体轨迹预测
主要针对人在拥挤场景下的轨迹进行预测。文献[54]通过聚类,确定一个人所属的关联组,然后基于关联规则挖掘,提取反映外部社会互动的频繁移动模式,这些移动模式最终整合在一起,以预测此人的下一个位置;文献[55]通过LSTM来学习单个轨迹特征,再利用社交亲和力图汇总附近人员的隐藏状态,相比于常规LSTM,此模型将社交亲和力考虑在内,按步对每一个观测点邻居关系进行考虑,从而挖掘其隐藏关系,经过LSTM模型训练,产生人体轨迹预测路径。
对行人进行轨迹预测的过程中,系统能够具体结合人在社交互动中所带来的影响,从而对行人进行轨迹预测,此方法不宜应用于车辆、船舶等领域。
4 模型分析
在使用模型之前需充分考虑其所在场景,根据不同的场景选择合适的模型,才能实现更好的预测结果。本文对轨迹预测模型进行了分析,结果如表1所示。
物理机理模型优点是计算效率高,但是不能考虑移动对象本身以及周边环境的不确定性,最终导致在长距离轨迹预测中不可靠。数据轨迹预测的算法较多,多模型之间的短板互补,使得其预测结果优于单模型轨迹预测。在意图识别的轨迹算法中,此类算法在长距离轨迹预测中有较好的表现,但是需要采集更多信息。移动个体交互模型需更加完整的体系架构来考虑个体之间的行为关系,相比于其他方法,交互式模型需要考虑的因素更多,不同场景下模型的通用性较差。目前对于多个体间相关性的轨迹预测研究仍较少,有待进一步的研究。
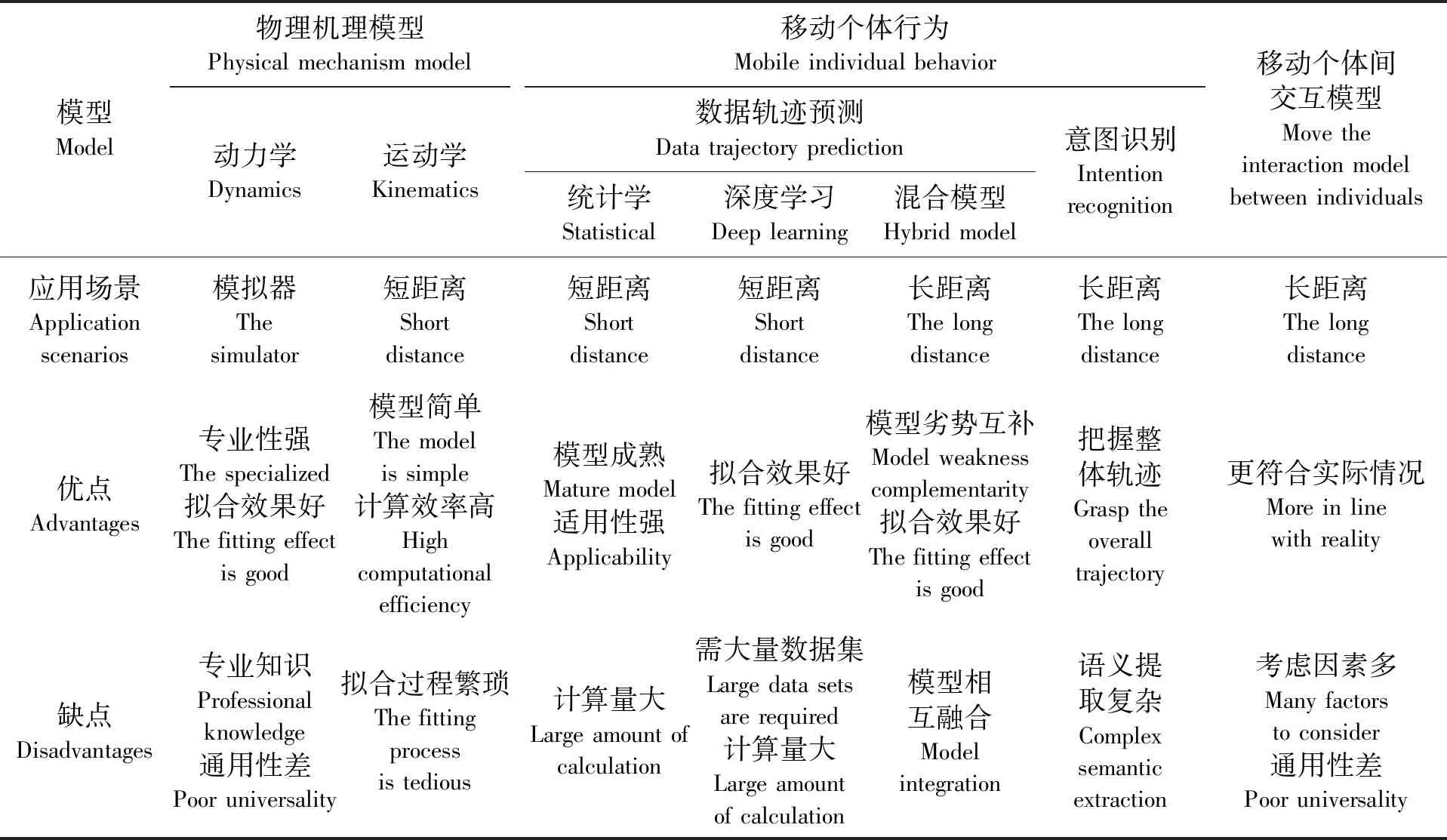
表1 模型效果分析表Tab.1 Model effect analysis table
在轨迹预测的过程中,除了个体本身,还需考虑更多外部因素的影响,外部影响因素包括环境的干扰,也有各本体之间的相互影响,这势必大幅提高轨道预测的复杂性和不确定性,是移动对象轨迹预测研究领域未来的一个重大挑战。另一个值得关注的研究领域是基于语义的轨迹挖掘和预测,随着轨迹数据获取能力的提升,更多语义标签的加持,必能带来更多的基于先验知识的算法模型,会为轨迹预测精度的大幅提升提供可能。
