基于长电偶极子和大磁圆环的新型电磁矢量传感器双基地多输入多输出雷达角度和极化参数联合估计*
2021-03-04谢前朋潘小义陈吉源肖顺平
谢前朋 潘小义 陈吉源 肖顺平
(国防科技大学, 电子信息系统复杂电磁环境效应国家重点实验室, 长沙 410073)
针对常规双基地电磁矢量传感器多输入多输出(multiple-input multiple-output, MIMO)雷达中短电偶极子 ( L/λ<0.1) 和小磁环 ( 2π(R/λ)<0.1) 辐射效率不足问题, 本文根据实际应用中电磁矢量传感器的有效长度来设计新型的发射电磁矢量传感器阵列和接收电磁矢量传感器阵列.首先, 通过平行因子算法来实现对双基地MIMO 雷达阵列接收数据空时特性的充分利用.这种处理过程能够实现发射俯仰角和接收俯仰角的自动参数配对.然后, 针对归一化坡印亭矢量估计器在长电偶极子和大磁圆环约束下无法实现角度和极化参数有效测量的问题, 对于利用平行因子算法得到的发射和接收加载矩阵采用新的盲估计算法来实现对角度参数和极化参数的高精度估计.所提出的盲估计算法在不需要电偶极子长度和磁环周长的先验信息的情况下能够有效地实现发射四维参数和接收四维参数的精确估计, 且该算法估计得到的八维参数满足自动参数配对特性.最后, 详细推导了长电偶极子和大磁圆环约束下双基地MIMO 雷达中角度和极化参数估计性能的克拉美罗界.仿真实验表明, 对于实际中长电偶极子和大磁圆环组成的新型电磁矢量传感器, 本文所提算法具有良好的参数估计性能.通过理论分析和仿真实验结果可以发现, 本文的研究工作能够进一步促进电磁矢量传感器在双基地MIMO 雷达中的应用.
1 引 言
近年来, 电磁矢量传感器阵列(electromagnetic vector sensors, EMVS)由于其优良的电磁测量能力得到了众多学者的广泛研究[1−5].相比于标量阵列, 电磁矢量传感器通过利用其包含的三个相互正交的电偶极子和三个相互正交的磁偶极子分别实现对电场矢量和磁场矢量信息的获取.随着对电磁矢量传感器研究的深入, 众多学者把电磁矢量传感器应用于集中式多输入多输出(multiple-input multiple-output, MIMO)雷达中, 以此来获取MIMO 雷达中目标参数的极化信息[6−13].本文主要研究电磁矢量传感器在双基地MIMO 雷达中的应用.
由于每个电磁矢量传感器包含6 个极子, 因此把电磁矢量传感器应用于双基地MIMO 雷达中面临着复杂的角度参数和极化参数提取问题.为了实现对双基地EMVS-MIMO 雷达中发射四维参数和接收四维参数的有效估计, 文献[6]首次利用旋转不变子空间算法(estimation of signal parameters via rotational invariance techniques, ESPRIT)来实现对二维发射角(two dimensional direction-ofdeparture, 2D-DOD)和二维接收角(two dimensional direction-of-arrival, 2D-DOA)的联合参数估计.但是, 文献[6]提出的ESPRIT 算法由于需要进行奇异值分解过程, 具有较大的计算复杂度.为了降低计算代价, 文献[7]利用传播算子方法(propagator method, PM)来实现对阵列接收数据信号子空间的近似.文献[8]进一步考虑利用EMVSMIMO 雷达阵列接收数据的多维特性, 提出高阶奇异值分解算法(high order singular value decomposition, HOSVD)来实现对角度参数和极化参数的联合估计.以上三种算法面临的主要问题在于都需要进行构建额外的谱峰搜索类配对优化函数来实现2D-DOD 和2D-DOA 的参数配对.谱峰搜索类配对函数的构建, 进一步增加了额外的计算复杂度.为了实现2D-DOD 和2D-DOA 的自动参数配对, 文献[9]提出平行因子算法.该算法利用平行因子多次迭代得到的加载矩阵包含的内部固有特性来实现对发射俯仰角和接收俯仰角的角度参数配对.文献[10]在文献[7]的基础之上提出修正的传播算子算法, 该算法通过对发射角和接收角利用相同的特征矢量矩阵求解来实现参数配对过程.文献[11]通过设计稀疏的发射阵列和接收阵列来实现对双基地EMVS-MIMO 雷达中角度参数和极化参数估计性能的提升.文献[12,13]针对双基地EMVSMIMO 雷达中的相关信源展开研究.
以上提出的针对双基地EMVS-MIMO 雷达中的角度参数和极化参数估计算法主要还是在短电偶极子 ( L/λ<0.1) 和小磁环 ( 2π(R/λ)<0.1) 组成的理想电磁矢量传感器约束下进行研究.但是, 实际中常用的电偶极子的长度和磁偶极子的周长一般情况下不满足上述约束[14−19], 即 L /λ>0.1 和2π(R/λ)>0.1.究其原因在于, 短电偶极子((L/λ)<0.1) 和小磁环 ( 2π(R/λ)<0.1) 组成的电磁矢量传感器不能有效地实现电磁辐射, 影响接收端的参数估计精度.因此, 为了适应实际目标探测的需要, 本文考虑长电偶极子和大圆环组成的电磁矢量传感器发射阵列和接收阵列背景下的双基地MIMO 雷达的角度参数和极化参数估计问题.相比于文献[6−13]中的短电偶极子和小磁环, 为了提取长电偶极子和大圆环组成的新型电磁矢量传感器中的角度信息和极化信息, 本文利用新的估计方法来避免归一化坡印亭矢量估计器的失效问题.本文提出的盲估计方法能够实现角度参数和极化参数高精度的求解.通过对新型电磁矢量传感器约束下的双基地MIMO 雷达进行详细的理论推导,能够进一步解决实际面临的角度和极化参数估计问题, 且通过设计不同的仿真实验进一步对电偶极子长度和磁环周长的选择提供了相应的技术支撑.
2 信号模型
2.1 长电偶极子和大磁圆环组成的新型电磁矢量传感器阵列信号模型
如图1 所示, 电磁矢量传感器包含三个相互正交的电偶极子和三个相互正交的磁环, 其中三个正交的电偶极子和磁环分别被用来实现对电场矢量和磁场矢量的测量.
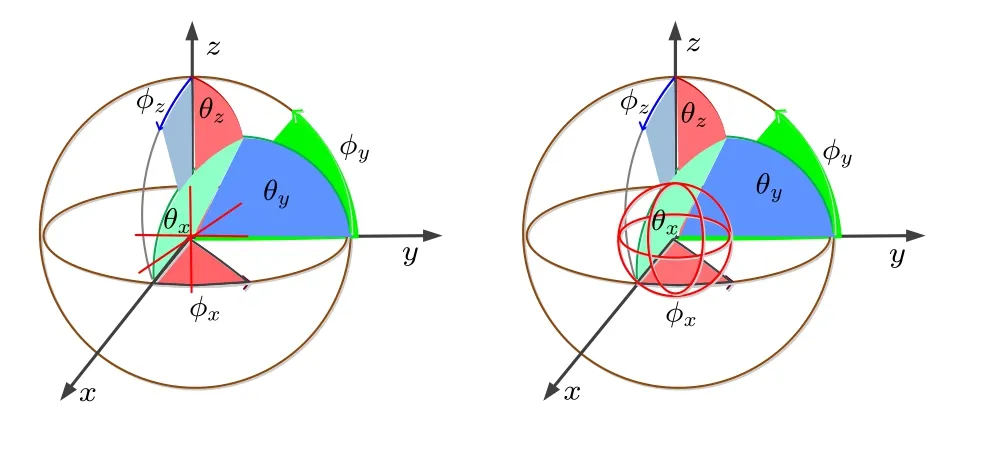
图1 三正交电偶极子和三正交磁环示意图Fig.1.Three orthogonal dipoles and three orthogonal loops.
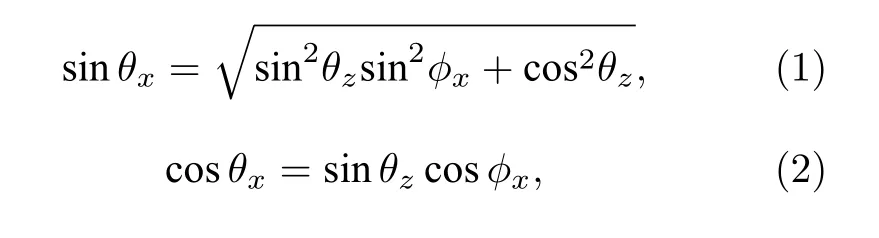
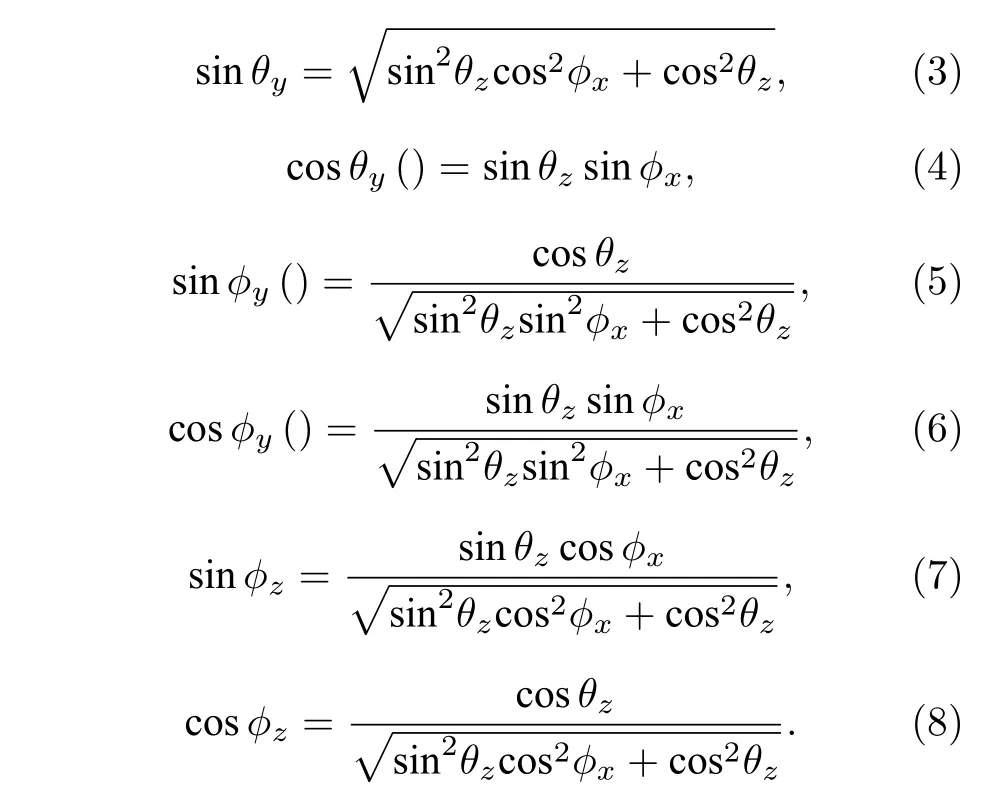
考虑一个电磁波信号以角度 ( θz,ϕx,γ,η) 入射到直角坐标系中, ( θz,ϕx) 分别表示入射信号的俯仰角和方位角, 角度范围分别为 θz∈[0,π) , ϕx∈[0,2π).γ 和 η 分别表示极化角和极化相位差, 相应的角度范围分别为 γ ∈[0,π/2] , η ∈[−π,π).同时根据图1中的空间坐标, θx∈[0,π] 表示入射信号的传播方向和正x 轴的夹角; θy∈[0,π] 表示入射信号的传播方向和正y 轴的夹角; ϕy∈[−π,π] 表示信源传播方向在 y -o-z 平面的投影和正y 轴的夹角;ϕz∈[−π,π] 表 示信源传播方向在 x -o-z 平面的投影和正z轴的夹角.以上各个角度与入射信号的方位角和俯仰角的关系如下:
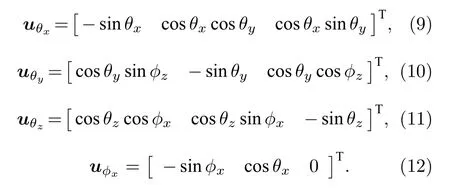
定义如下的单位矢量 uθx, uθy, uθz和uϕx
根据图1 可以看出, 在直角坐标系下入射目标的电磁场域矢量可以分别表示为
因此, 理想电磁矢量传感器的空间响应可以表示为
在文献[17−19]中, 针对长电偶极子和大圆环背景下的三正交电偶极子和三正交磁偶极子进行了详细的分析.根据文献[17−19]中的推导, 下面给出长电偶极子和大圆环背景下新的电场矢量和磁场矢量.实际中常用的电偶极子的长度一般满足 L /λ>0.1 , 例如半波长偶极子.同样地, 常用的磁偶极子的长度也要求满足 2 π(R/λ)>0.1 ,如单位波长磁环.对于长电偶极子组成的三正交阵列, 其电场矢量并不是仅仅等于理想的电场矢量 e 和标量数据的乘积, 相反其是一个电场矢量e和三元组有效长度 le的点乘.其中,le的详细形式为
其中, θx∈[0,π) 表示入射信源的传播角和x 轴的夹角, θy∈[0,π) 表示入射信源的传播角和y 轴的夹角, 且

电偶极子的有效长度不仅仅取决于偶极子自身的物理长度, 还与入射信号的自身波长有关.同样地, 实际中三正交磁环的磁场矢量也是 h 和三元组有效长度 lh的点乘=h·lh.lh的详细形
式为
其中
其中, J1(·) 表示一阶第一类贝塞尔函数.因此, 一个包含三正交的长电偶极子和三个相互正交的大磁环构成的六元电磁矢量传感器, 其详细的电场形式和磁场形式可以表示为
通过对(15)式和(20)式的对比可以发现, 为了实现角度参数和极化参数的求解, 常用的归一化坡印亭矢量处理方法在长电偶极子和大磁圆环的约束下失效.因此, 为了解决实际双基地EMVSMIMO 雷达中的角度参数和极化参数估计问题,在接下来的分析中, 通过寻找新的处理手段来实现长电偶极子和大磁圆环组成的新型EMVS 背景下的目标参数估计.
2.2 长电偶极子和大磁圆环约束下双基地EMVS-MIMO 雷达信号模型
如图2 所示, 考虑一个包含M 个长电偶极子和大磁圆环组成的新型EMVS 发射阵列和N 个长电偶极子和大磁圆环组成的新型EMVS 接收阵列的双基地 EMVS-MIMO 雷达系统, 其中发射阵列和接收阵列的阵元间距均是半波长.且发射EMVS 阵列和接收EMVS 阵列中长电偶极子的长度和大磁环的周长分别设置为 L ((L/λ)>0.1) 和R (2π(R/λ)>0.1).因此, 新型发射EMVS 阵列和新型接收EMVS 阵列的阵元位置为
假设目标的个数为K, 则长电偶极子和大圆环磁偶极子组成的发射 EMVS 导向矢量和接收EMVS 导向矢量分别为

图2 长电偶极子和大磁圆环组成的新型双基地EMVS-MIMO 雷达系统示意图Fig.2.New designed bistatic EMVS-MIMO radar system with long dipoles and large loops.
其中, Ftk(θtk,ϕtk) 和 Frk(θrk,ϕrk) 表示维度为6×2的空间角度位置矩阵, 且 θtk,θrk∈[0,π) 表示俯仰角, ϕtk,ϕrk∈[0,2π) 表示方位角.gtk(γtk,ηtk) 和grk(γrk,ηrk) 表示维度为 2 ×1 的极化状态矢量, 且γtk,γrk∈[0,π/2] 表 示极化角, ηtk,ηrk∈[−π,π] 表示极化相位差.其 中, θxtk, θytk, θxrk, θyrk, lextk,leytk, leztk, lhxtk, lhytk, lhztk, lexrk, leyrk, lezrk,lhxrk, lhyrk, lhzrk的详细形式可以根据(1)式—(8)式, (17)式和(19)式来获得.
据(15)式和(20)式可见, 由于长电偶极子和大圆环磁偶极子的空间电磁响应和理想的短电偶极子和小磁环对应的空间电磁响应不同, 因此, 常用的矢量叉积算法并不能有效地实现发射四维参数和接收四维参数的求解.为了实现长电偶极子和大磁圆环背景下的发射四维参数和接收四维参数求解, 在下一章节将采用有效的盲校正方法.
进一步地, 利用双基地 EMVS-MIMO 雷达发射信号波形和接收信号波形的正交性, 匹配滤波之后的阵列接收数据可以表示为[6]

其中 At=[at1,at2,···,atK] 和Ar=[ar1,ar2,···,arK]分别表示发射导向矢量矩阵和接收导向矢量矩阵,n(t)表示加性高斯白噪声矢量.对于T 个采样快拍, 总的阵列接收数据可以表示为

对于长电偶极子和大圆环磁偶极子组成的双基地EMVS-MIMO 雷达, 其阵列接收数据的结构仍然具有空时特性.因此, 为了充分考虑发射阵列、接收阵列和采样快拍之间的内在联系, 这里采用张量结构来对阵列接收数据进行处理.
3 基于新型盲估计算法的联合角度和极化参数估计
3.1 高分辨联合角度和极化参数估计
根据文献[20]中平行因子分解的定义, (28)式中的阵列接收数据可以进一步的被重新表示为
相应地, 关于发射导向矢量矩阵 At和接收导向矢量矩阵 Ar的联立方程可以分别被表示为
通过文献[9,11]中相同的处理方式, 利用平行因子分解算法的多次迭代过程, 最终能够实现对加载矩阵和的有效求解.并且, 包含在和中的2 D-DOD 和2 D-DOA 是自动配对的.下面分别针对估计得到的发射导向矢量矩阵和接收导向矢量矩阵进行发射俯仰角、发射方位角、发射极化角、发射极化相位差和接收俯仰角、接收方位角、接收极化角、接收极化相位差的估计.



进一步地, 估计得到的发射俯仰角的正弦值可以表示为

因此, 相应的发射俯仰角可以被表示为

当获得发射阵列的俯仰角之后, 为了实现发射方位角、发射极化角和极化相位差的求解, 首先,通过如下的方式获得长电偶极子和大圆环磁偶极子组成的新型EMVS 阵列的空间响应函数


图3 新型阵列 EMVS-MIMO 雷达系统旋转不变关系构建Fig.3.The rotational invariance relationship for new designed bistatic EMVS-MIMO radar system.
下面利用盲估计算法实现对 ( ϕtk,γtk,ηtk) 进行角度参数估计.
则估计得到的极化相位差可以被表示为

如果 L /λ>0.1 和 2 π(R/λ)>3.8317 , 根据(17)式和(19)式中的 lez和 lhz的定义, 此时二者的取值为负, 因此以上对 ηtk的求解需要进行加 π 来实现相应的相位补偿.下面对 ϕtk进行求解, 首先, 通过下面的操作去除 c1tk中的相位信息

进一步地, 通过如下的求解方式从(42)式中的复值中移除实数因子lextkcsc θxtk
其中, ℜ 表示实部, ℑ 表示虚部.类似地, 为了去除c2tk中的相位信息, 构建如下的求解过程
通过如下的求解方式从(44)式中的复值中移除实数因子leytkcsc θytk

对等式(43)式和(45)式进行分析可以发现,在已经估计得到极化相位差 η ˜tk之后, 通过的相除可以去除两者中的公共因子 t an γtkcos θtk.除过之后的变量仅仅是关于 ϕtk的, 因此, 入射信源的方位角估计可以表示为
在求得极化相位 差 ηtk和 方位角 ϕtk之后, 下面进行对极化角 γtk的求解.
通过如下的方式去除 c4tk中的相位信息
类似地, 去除 c5tk中的相位信息, 可以进一步被表示为


进一步地把(49)式和(50)式进行相除, 可以得到
从(51)式可以看出, 在已经获得极化相位差ηtk和方位角 ϕtk之后, (51)式仅仅与极化角 γtk有关.最终, 估计得到的极化角可以被表示为
因此, 经过上面的求解之后, 最后可以得到长电偶极子和大磁圆环组成的新型电磁矢量传感器针对入射信源的发射四维参数.并且, 通过上面的分析可以发现, 以上的求解过程并不需要额外的以及极化角作为先验信息, 完全实现了角度参数和极化参数求解的盲估计, 通过以上处理过程得到的满足自动参数配对特性.



进一步地, 估计得到的接收俯仰角的正弦值可以表示为

因此, 相应的接收俯仰角可以被表示为

当获得接收阵列的俯仰角之后, 为了实现接收方位角、接收极化角和极化相位差的求解, 通过如下方式首先获得长电偶极子和大磁圆环组成的EMVS 阵列的空间响应函数

下面利用盲估计算法实现对 ( ϕrk,γrk,ηrk) 进行角度参数估计.


则估计得到的极化相位差可以被表示为
如果 L /λ>0.1 和 2 π(R/λ)>3.8317 , 根据(17)
式和(19)式中的 lez和 lhz的定义, 此时二者的取值为负, 因此以上对 ηrk的求解需要进行加 π 来实现相应的相位补偿.下面对 ϕrk进行求解, 首先, 通过下面的操作去除 c1rk中的相位信息

进一步地, 通过如下的求解方式从(63)式中的复值中移除实数因子lexrkcsc θxrk
类似地, 为了去除 c2rk中的相位信息, 构建如下的求解过程
通过如下的求解方式从(65)式中的复值中移除实数因子leyrkcsc θyrk
对等式(64)式和(66)式进行分析可以发现,在已经估计得到极化相位差之后, 通过的相除可以去除两者中的公共因子 t an γrkcos θrk.除过之后的变量仅仅是关于 ϕrk的, 因此, 入射信源的方位角估计可以表示为
在求得 极化相位差 ηrk和方位角 ϕrk之后, 下 面对极化角 γrk进行求解.
通过如下的方式去除 c4rk中的相位信息
类似地, 去除 c5rk中的相位信息, 可以进一步被表示为


进一步把(70)式和(71)式进行相除, 可以得到
从(72)式中可以看出, 在已经获得极化相位差 ηrk和方位角 ϕrk之后, (72)式仅仅与极化角 γrk有关.最终, 估计得到的极化角可以被表示为
因此, 经过上面的求解之后, 最后可以得到长电偶极子和大磁圆环组成的新型电磁矢量传感器针对于信源的接收四维参数.并且, 通过上面的分析可以发现, 以上的求解过程并不需要额外的以及极化角作为先验信息, 完全实现了角度参数和极化参数求解的盲估计, 通过以上处理过程得到的满足自动参数配对特性.
最终, 经过以上的算法处理, 得到的对应于发射 EMVS 阵列和接收 EMVS 阵列的发射俯仰角、发射方位角、发射极化角、发射极化相位差和接收俯仰角、接收方位角、接收极化角、接收极化相位差能够保证良好的估计精度.
3.2 克拉美罗界(Cramer-Rao Bound)
由于长电偶极子的长度和大磁圆环的周长作为变量也影响着角度估计的精度, 对于所设计的新型长电偶极子和大磁圆环组成的EMVS 阵列, 双基地EMVS-MIMO 雷达需要估计的参数分别为(θt,ϕt,γt,ηt,L,R) 和 ( θr,ϕr,γr,ηr,L,R) , 其中
因此, 关于以上未知变量的Fisher 信息矩阵可以被表示为
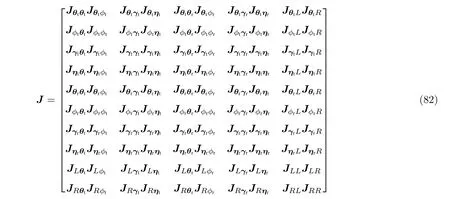

因 此, Fisher 信 息 矩 阵 J 关 于(θt,ϕt,γt,ηt,L,R)和 ( θr,ϕr,γr,ηr,L,R) 的详细形式可以进一步被表示为[21]
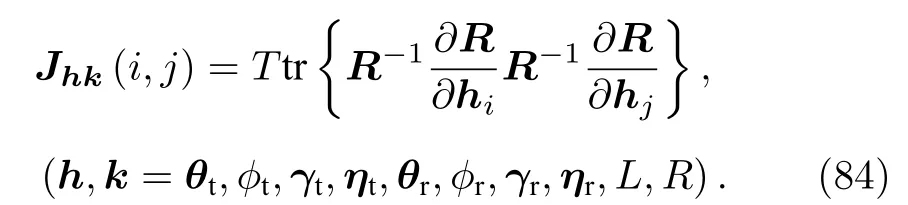
在附录A 中, 详细给出了Fisher 信息矩阵J中各个元素的推导过程.由于得到的Fisher 矩阵J满足Hermitian 特性, 因此, 只需要知道上对角线的元素值即可获得整个矩阵的值.最终, 对于获得的 J , 对应于发射参数 ( θt,ϕt,γt,ηt,L,R) 和接收参数 ( θr,ϕr,γr,ηr,L,R) 的CRB 可以被表示
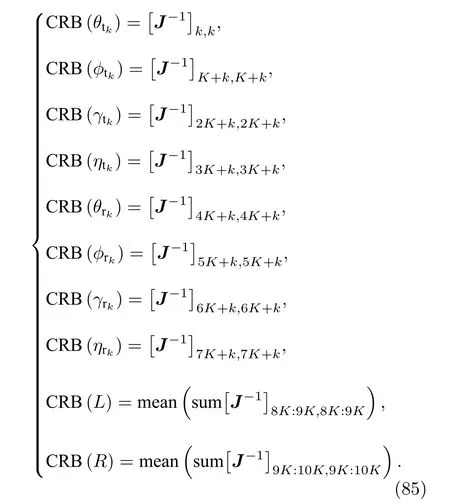
故, 经过以上的推导过程可以获得CRB 的闭式解.
4 仿真实验
下面通过一系列的仿真实验来验证所提算法对于发射四维参数和接收四维参数的参数估计性能.如图2 所示, 发射EMVS 阵列和接收EMVS阵列均是由长电偶极子和大磁圆环组成, 其中发射阵列个数和接收阵列个数分别被设置为 M =6 和N =8.并且, 发射EMVS 阵列和接收EMVS 阵列的阵元间距均为半波长.
4.1 算法的角度参数自动配对特性
首先, 通过星座图来验证所提盲估计算法的角度参数自动配对的有效性.在仿真中, 长电偶极子的长度设置为 L /λ=0.5 , 大磁圆环的周长设置为2π(R/λ)=1.假设入射目标的个数 K =4 , 并且各个信号之间相互独立, 相应的发射俯仰角、发射方位角、发射极化角、发射极化相位差和接收俯仰角、接收方位角、接收极化角、接收极化相位差如表1所列.仿真中噪声设置为相互独立的零均值加性高斯白噪声, 并且信号和噪声之间相互独立.快拍数T 设置为200, 信噪比设置为 2 0 dB.利用100次蒙特卡罗仿真实验结果来绘制如图4 所示的星座图.
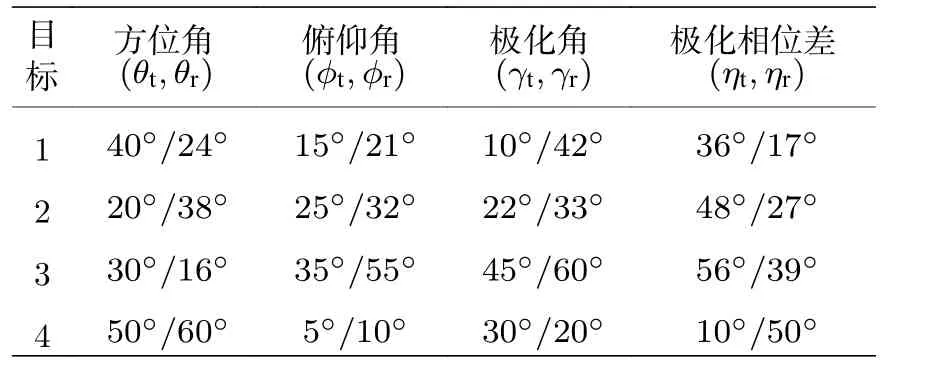
表1 目标回波参数表Table 1.Parameters of target signals.
从图4(a)和图4(b)中可以看出, 提出的平行因子算法能够实现2D-DOD 和2D-DOA 的自动参数配对.同时从图4(c)—图4(f)中可以看出, 通过对利用平行因子算法得到的发射加载矩阵和接收加载矩阵进行盲估计算法应用能够有效地实现发射方位角、发射极化角、发射极化相位差、接收方位角、接收极化角和接收极化相位差的角度参数配对.并且, 在进行四维发射参数和四维接收参数求解时所提出的盲估计算法不需要大电偶极子长度和圆环周长的先验信息.
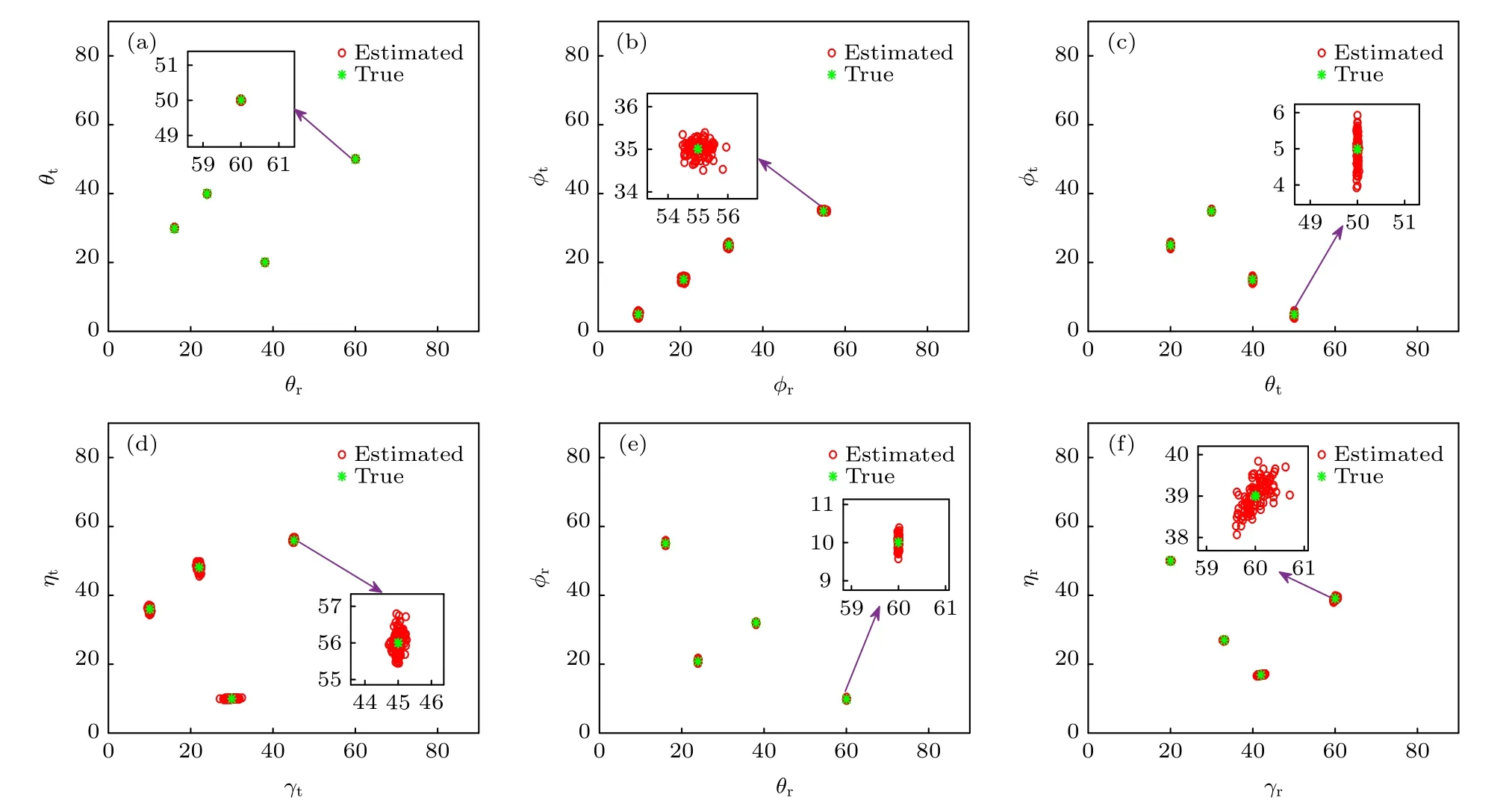
图4 新型双基地EMVS-MIMO 雷达角度参数和极化参数估计星座图 (a) 发射俯仰角和接收俯仰角; (b) 发射方位角和接收方位角; (c) 发射俯仰角和发射方位角; (d) 发射极化角和极化相位差; (e) 接收俯仰角和接收方位角; (f) 接收极化角和极化相位差Fig.4.Scatter plot of the angle parameters and polarization parameters by using the new designed bistatic EMVS-MIMO radar:(a) Scatter plot of the transmit elevation angle and receive elevation angle ; (b) scatter plot of the transmit azimuth angle and receive azimuth angle; (c) scatter plot of the transmit elevation angle and azimuth angle ; (d) scatter plot of the transmit polarization angle and polarization phase difference; (e) scatter plot of the receive elevation angle and azimuth angle ; (f) scatter plot of the receive polarization angle and polarization phase difference.
4.2 长电偶极子和大磁圆环组成的新型EMVS 阵列随信噪比的变化
在第二个仿真实验中, 验证长电偶极子和大磁圆环组成的新型EMVS 阵列的角度和极化参数估计性能随信噪比的变化.均方误差的定义为其中表示估计得到的角度或极化参数, ϑ 表示真实的角度或极化参数,I 表示蒙特卡罗仿真实验次数.在这个仿真中, 信噪比的变化范围是 − 10 — 3 0 dB , 变化的步长为5 dB, 在每个信噪比条件下蒙特卡罗仿真实验次数为200.同时, 也给出了相应的检测成功概率曲线.其中检测成功概率定义为每个入射信源的估计角度和极化角度与真实的角度和极化角度的差值小于 1◦.入射信源的个数K 此时设置为3, 相应的发射四维参数和接收四维参数和第一个实验中前三个入射信源相同.长电偶极子的长度设置为L/λ=0.5 , 大磁圆环的周长设置为 2 π(R/λ)=1.其中的下标d 表示角度参数, 下标p 表示极化参数.图中 s1d, s2d, s3d和 C RBds1 , C RBds2 ,CRBds3分别对应于第一个信源、第二个信源和第三个信源的角度参数以及相应的克拉美罗界.同样地, 图中s1p, s2p, s3p, 和 C RBps1 , C RBps2 , C RBps3 分别对应于第一个信源、第二个信源和第三个信源的极化参数以及相应的克拉美罗界.从图5 中可以看出, 每个信源的均方误差性能和检测成功概率随着信噪比的增加而提升.通过仿真可以发现, 对于实际中用到的长电偶极子和大磁环组成的EMVS 双基地MIMO 雷达系统, 通过对电偶极子和磁环周长进行合理的设置, 其相应的角度参数估计精度能够维持在一个合理的区间.总体上, 在信噪比大于10 dB 之后, 所提出的盲估计算法具有较好的参数估计精度.因此, 图5 中的仿真实验结果为进一步利用长电偶极子和大磁圆环组成的新型EMVS 阵列提供了相应的指导.
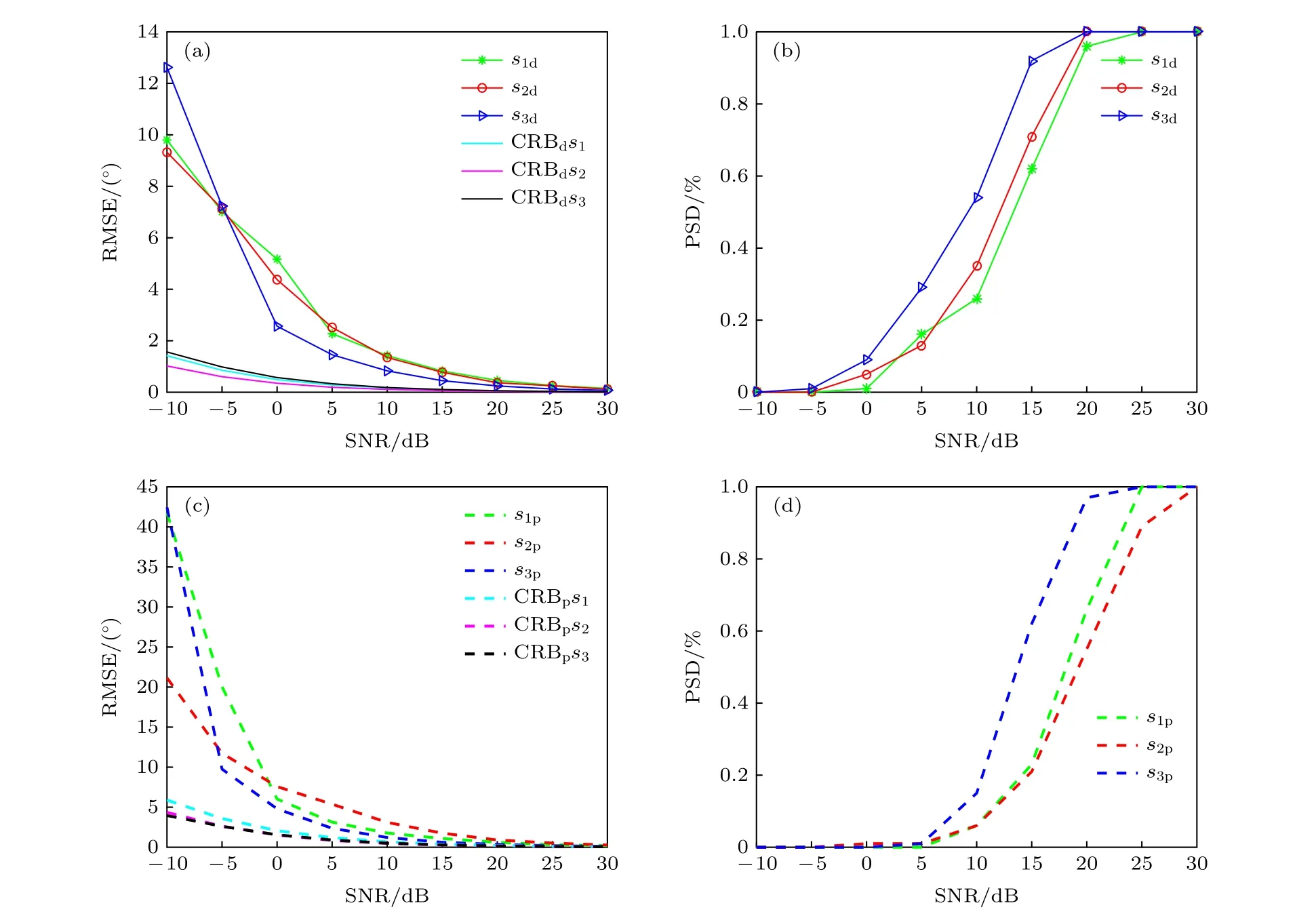
图5 新型阵列角度和极化参数估计性能随信噪比的变化 (a) 角度估计均方误差随信噪比的变化; (b) 角度检测概率随信噪比的变化; (c) 极化估计均方误差随信噪比的变化; (d) 极化检测概率随信噪比的变化Fig.5.The effect of the SNR for the proposed new bistatic EMVS-MIMO radar: (a) Curves of angle’s RMSE versus SNR; (b) curves of angle’s PSD versus SNR; (c) curves of polarization’s RMSE versus SNR; (d) curves of polarization’s PSD versus SNR.
4.3 长电偶极子和大磁圆环组成的新型EMVS 阵列随快拍数的变化
在第三个实验中考虑快拍数对长电偶极子和大磁圆环组成的双基地EMVS-MIMO 雷达角度参数估计性能的影响.这里, 入射信源的个数以及其相应的发射和接收四维参数和第二个实验相同.长偶极子的长度和大圆环的周长仍然保持不变.快拍数的变化范围为 1 00 −1000 , 变化的步长为100.信噪比设置为 1 0 dB.在每个快拍数条件下蒙特卡罗仿真实验次数为200.从图6 中的仿真结果可以看出, 随着快拍数的增加, 新型EMVS 阵列的角度和极化参数估计性能在提升.但是由于信噪比设置为10 dB, 三个信源最终的检测成功概率仍然不能接近于1.这说明在该信噪比的条件下, 利用新型阵列结构估计得到的角度参数和极化参数和真实的角度参数和极化参数之间的差值仍然大于所设定的门限值.因此, 为了获得更加良好的角度和极化参数性能, 在实际的角度参数估计中, 应该设置较高的信噪比门限, 从而提升新型阵列的空间目标获取能力.
4.4 电偶极子的长度对估计精度的影响
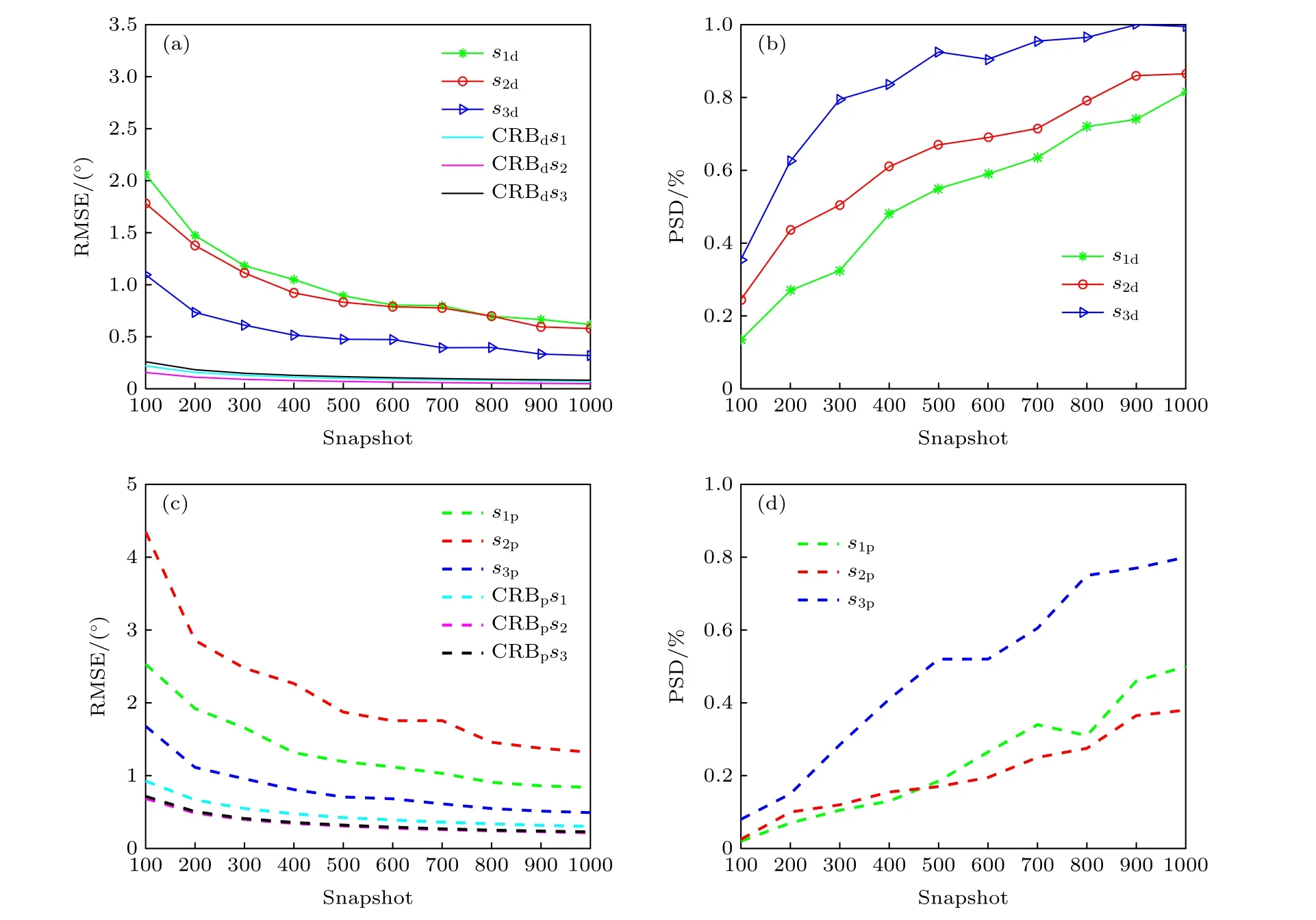
图6 新型阵列角度和极化参数估计性能随快拍数的变化 (a) 角度估计均方误差随快拍数的变化; (b) 角度检测概率随快拍数的变化; (c) 极化估计均方误差随快拍数的变化; (d) 极化检测概率随快拍数的变化Fig.6.The effect of the snapshot for the proposed new bistatic EMVS-MIMO radar: (a) Curves of angle’s RMSE versus snapshot;(b) curves of angle’s PSD versus snapshot; (c) curves of polarization’s RMSE versus snapshot; (d) curves of polarization’s PSD versus snapshot.
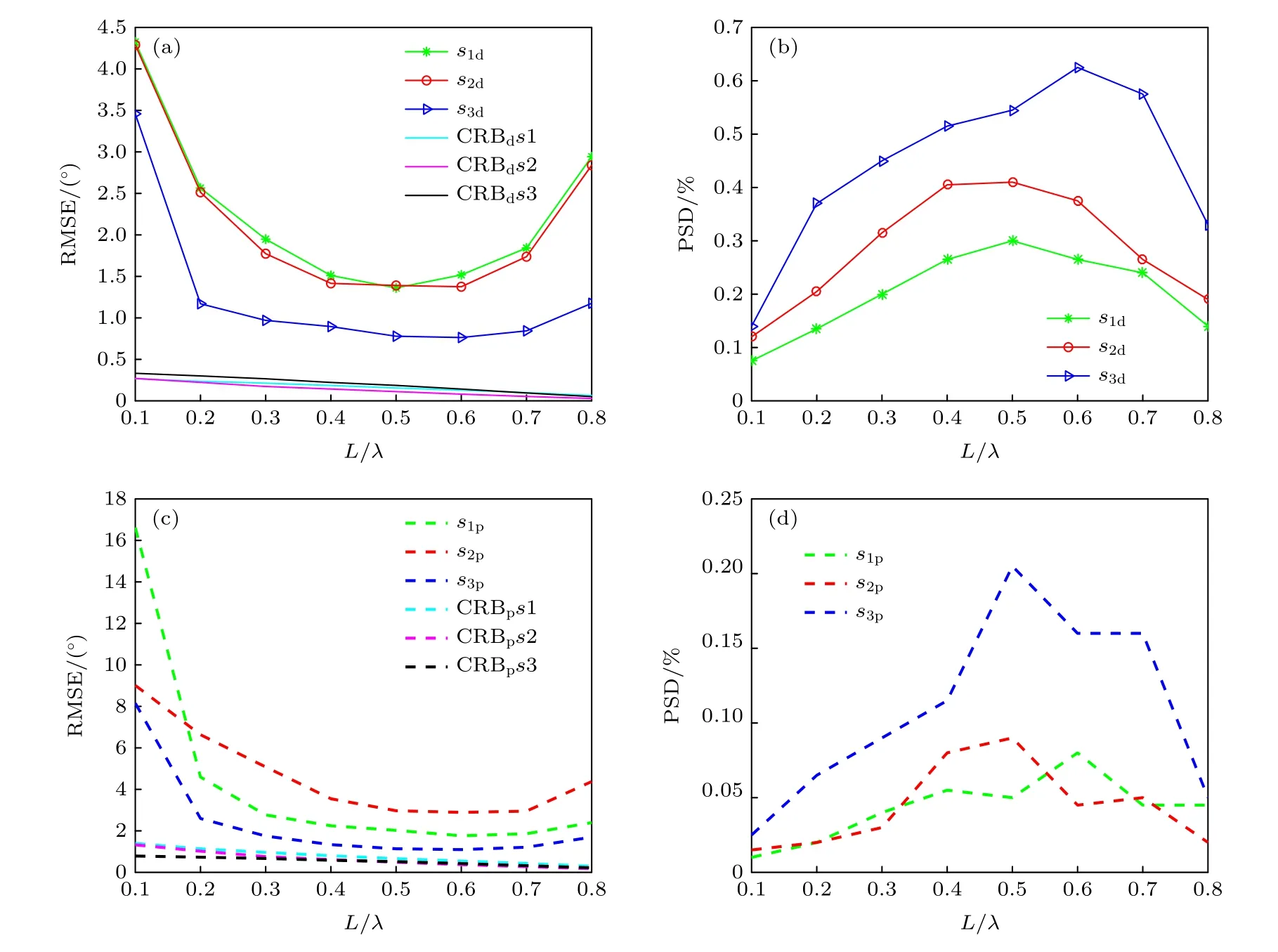
图7 不同电偶极子的长度对角度和极化参数估计性能的影响 (a) 角度估计均方误差随电偶极子长度的变化; (b) 角度检测概率随电偶极子长度的变化; (c) 极化估计均方误差随电偶极子长度的变化; (d) 极化检测概率随电偶极子长度的变化Fig.7.The effect of the various L /λ for the proposed new bistatic EMVS-MIMO radar: (a) Curves of angle’s RMSE versus various L /λ ;(b) curves of angle’s PSD versus various L /λ ; (c) curves of polarization’s RMSE versus various L /λ ; (d) curves of polarization’s PSD versus various L /λ.
在第四个仿真实验中验证电偶极子的长度变化对双基地EMVS-MIMO 雷达中角度和极化参数估计性能的影响, 该仿真实验结果为设计合适长度的电偶极子提供相应的参考.入射信源的个数及其发射四维参数和接收四维参数和第二个实验相同.此时, 信噪比和快拍数分别被设置为200 和 1 0 dB.大磁环的周长被设置为 2 π(R/λ)=1.电偶极子的长度的变换范围是0.1—0.8, 变化步长为0.1.在每个大电偶极子背景下蒙特卡罗仿真实验次数被设置为200.从图7 中的仿真结果可以发现, 随着电偶极子长度的增加, 所设计的新型EMVSMIMO 雷达的角度参数和极化参数估计性能先是变好, 然后又变差.这说明并不是电偶极子的长度越长越好, 越长的电偶极子可能会产生较大的角度和极化参数估计误差.同时从检测成功概率曲线可以看出, 随着电偶极子长度的增加, 对于极化参数具有较低的估计性能.该仿真实验说明在此信噪比和快拍数的背景下, 长电偶极子的长度变化对极化参数的估计能力较弱.
4.5 磁偶极子的周长对估计精度的影响
最后, 通过仿真实验来验证磁偶极子的周长对新型阵列角度和极化参数估计性能的影响.入射信源的个数及其发射四维参数和接收四维参数和第二个实验相同.此时, 信噪比和快拍数分别被设置为200 和 1 0 dB.长电偶极子的长度被设置为L/λ=0.5.大磁环周长的变换范围是0.1—2.8, 变化步长为0.3.在每个大磁环周长背景下蒙特卡罗仿真实验次数被设置为200.从图8 的仿真结果可以发现, 随着磁偶极子周长的增加, 所设计的新型EMVS-MIMO 雷达的角度参数和极化参数估计性能并不能一直保持不变.当磁环的周长2π(R/λ)>1时, 新型EMVS 阵列的角度参数和极化参数估计性能随着磁环周长的增加而变差.对应的检测成功概率也较差.尤其是对于极化参数的估计性能,其均方误差还是具有相对较大的值.因此, 在对磁环周长进行设计时, 不能一味地追求辐射效率而忽视角度参数估计精度.通过第四个和第五个实验,在进行长电偶极长度和大磁环周长设计时, 即要兼顾辐射效率也要兼顾角度参数估计精度, 在二者之间寻求一个较好的平衡点.
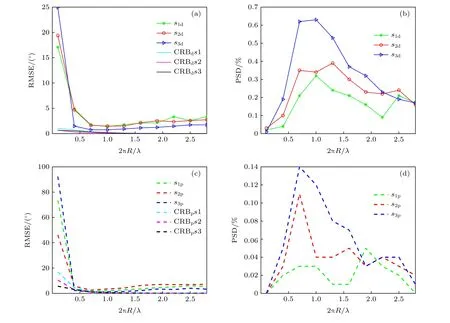
图8 不同磁偶极子周长对角度参数和极化参数估计性能的影响 (a) 角度估计均方误差随磁偶极子周长的变化; (b) 角度检测概率随磁偶极子周长的变化; (c) 极化估计均方误差随磁偶极子周长的变化; (d) 极化检测概率随磁偶极子周长的变化Fig.8.The effect of the various 2 π(R/λ) for the proposed new bistatic EMVS-MIMO radar: (a) Curves of angle’s RMSE versus various 2 π(R/λ) ; (b) curves of angle’s PSD versus various 2 π(R/λ) ; (c) curves of polarization’s RMSE versus various 2 π(R/λ) ;(d) curves of polarization’s PSD versus various 2 π(R/λ).
5 结 论
为了解决实际中短电偶极子和小磁环在双基地MIMO 雷达中辐射效率不足的问题, 本文利用长电偶极子和大圆磁环来设计新型的发射EMVS阵列和接收EMVS 阵列来处理实际中双基地MIMO雷达的角度参数和极化参数估计问题.在进行角度和极化参数求解的过程中, 通过采用平行因子算法来实现对阵列接收数据三维结构的利用和发射俯仰角和接收俯仰角的角度参数配对.同时, 由于归一化坡印亭矢量估计器无法实现长电偶极子和大圆磁环组成的新型EMVS 阵列中的角度和极化参数的提取, 新的盲估计算法被提出来实现对发射四维参数和接收四维参数进行有效估计.所提出的盲估计算法能够实现发射方位角、发射极化角、发射极化相位差、接收方位角、接收极化角、接收极化相位差和发射俯仰角、接收俯仰角的自动参数配对.通过理论分析和仿真实验可以发现, 在实际应用中并不是电偶极子的长度和磁环的周长越大越好, 在对电磁矢量传感器进行设计时, 既要考虑辐射效率也要考虑角度参数的估计精度.因此, 本文针对长电偶极子和大磁圆环背景下的双基地MIMO 雷达的研究能够为下一步的工程应用提供相应的参考.
附录A
为了实现Fisher 信息矩阵 J 中各个元素的求解, 下面首先详细分析协方差矩阵 R 关于 ( θt,ϕt,γt,ηt,L,R) 和(θr,ϕr,γr,ηr,L,R)偏导数的具体形式








根据以上公式, Jθtθt(i,j) 可以被表示为


经过以上的详细推导过程即可实现Fisher 信息矩阵 J 中各个元素的求解.
