河湖水生态信息监测智能无人船的应用研究
2021-03-03邢方亮王天奕郭泽斌
邢方亮,王天奕,王 磊,陈 俊,郭泽斌
(珠江水利委员会珠江水利科学研究院,广东 广州 510611)
1 概述
河湖监管问题多、处理难、任务重,靠人工巡查、定期采样检测等方式,监管难度大、效率低,难以及时高效发现和排查问题。河湖监管现有的人工或监测站点建设成本高、监测范围有限、覆盖面不全等问题,与国外欧美发达国家相比仍有明显的差距。水利部多次提出提高河湖水生态管理智能化水平[1],科学布设监测站点,利用无人船等技术手段实现动态监管,能及时掌握河湖水域变化情况,对河湖管理具有重要意义[2]。
研究推广基于物联网技术的河湖水生态信息监测智能无人船,可以实时动态采集水质、流速流量、水深、污染源分布等信息[3],实现从点源到面源的数据监测,有效弥补了现有监测手段“覆盖面不全,建设成本巨大”等不足之处[4],推进生态环境保护督查执法,为各地污染防治、打响环境保护攻坚战和河湖长制提供科学有效的技术支撑,对深入落实新时期十六字的治水方针,对“补短板、强监管”总基调的纵向发展起到推动作用,加速水利治理体系和能力向现代化转变,对建设人民的幸福河湖也具有深远意义。
2 智能无人船系统设计方案
2.1 系统功能
智能无人船能够适用于湖泊、城市河道水域,灵活性高,检测要素多且精度高,并能够实现自主巡航避障和远程监控的水生态监测无人船[5]。根据以上需求,提出如下设计要求及功能。
1) 船体设计
采用小型模块化船体,适用于湖泊、河道狭窄水道航行,具有吃水浅、转向灵活等优势,提高在狭窄水道与浅水沟渠的适航能力[6]。
2) 续航能力
主要采用锂电池蓄电,同时使用薄膜太阳能发电装置,为无人船与船载设备提供所需能源和动力,以上系统可保证无人船至少5 h的续航能力。
3) 自主航行控制功能
不受时间和气候影响,在水面进行不间断的智能作业,实现智能导航技术与航迹规划相结合,既可在无人工设定的情况下自主设置采样路线及自动导航,也可遥控无人船和根据预设的航迹规划执行航行测量。
4) 监测及取样功能
无人船平台预留大量监控接口,方便搭载和集成采样系统、多参数水质在线分析仪、水文传感器等设备,可根据监测要求进行设计,水温误差≤0.5℃,溶解氧误差≤0.1 mg/L,电导率误差≤10 us/cm,氨氮误差≤0.05 mg/L,浊度误差≤0.5 NTU,酸碱度误差≤0.1 pH进行多样化采集。具有水体取样功能,可以将水样储存带回分析处理。
5) 智能监控软件
基于云计算平台的服务器,提供界面友好的控制软件[7],让用户操作无人船前往目标水域开展相关水质采样更加方便快捷,同时能够把数据进行可视化显示并保存,让用户在后续工作中查看分析数据更加直观便捷,为河湖管理、决策分析提供全方位智能化办公手段。
2.2 系统总体设计
系统由移动监控平台(无人船)、手动控制终端和监控中心3个部分组成,融合了机械、电子、通信、网络和软件等多方面专业技术内容[8],其系统总体结构如图1所示。
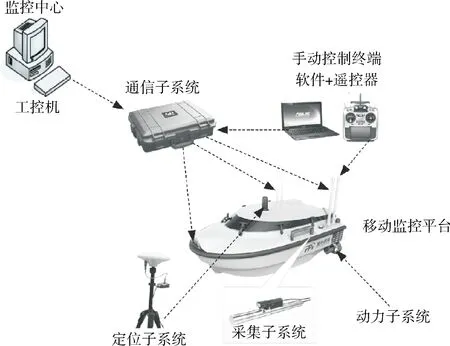
图1 系统总体框示意
移动监控平台以船体为载体,具有与体积小、成本低、改造性强等优点,通过机械加工和固定,将研发的中央控制板安装在船体上面,其中主要由中央处理芯片、电源模块、各个功能模块组成。移动监控平台的模块组成如图2所示。
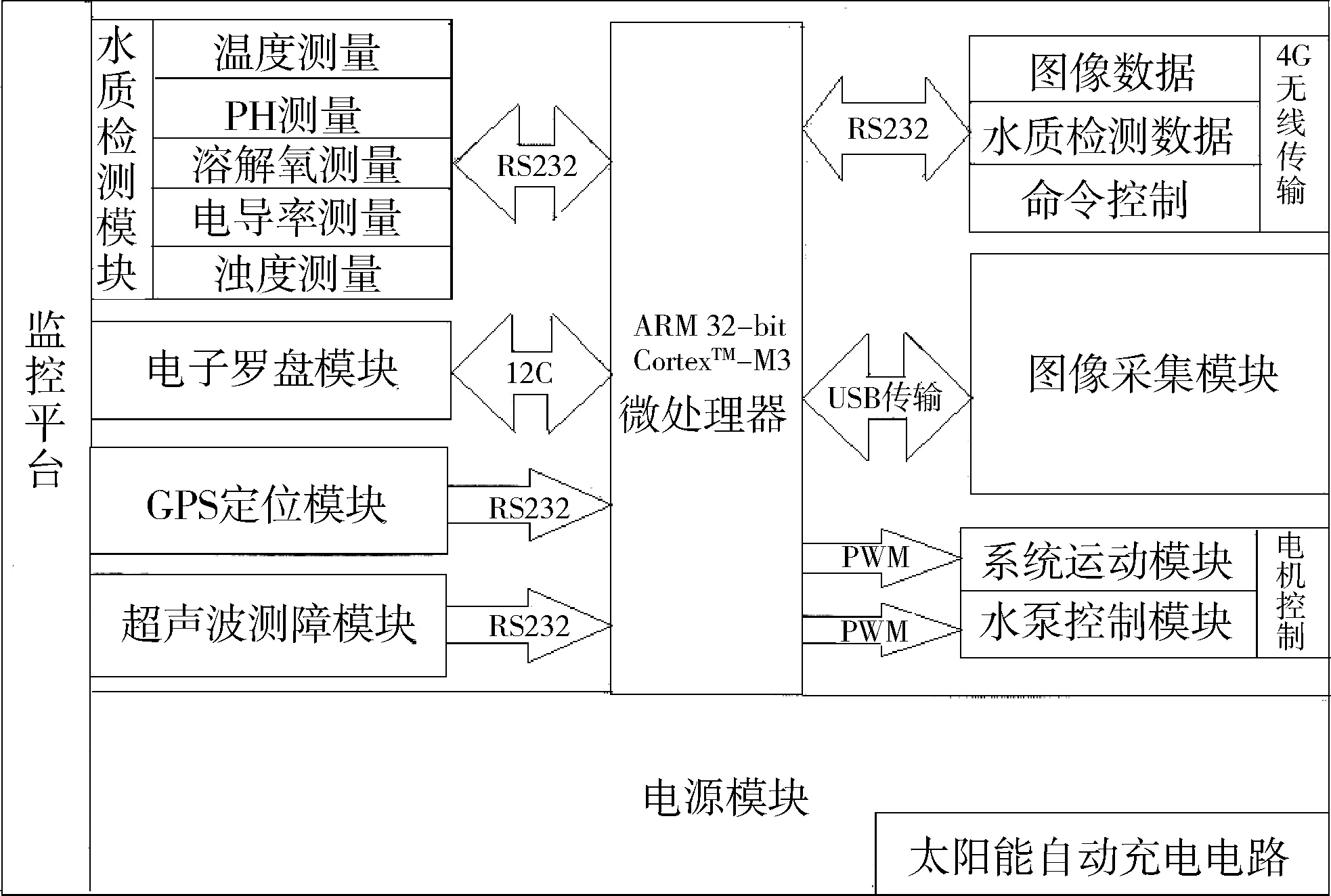
图2 移动监控平台组成示意
3 系统硬件设计与实现
3.1 船体
智能无人船采用小水线面双体船,有效的减小航行阻力,提高航行速度和抗浪性,增强航行稳定性和负载能力。船体可快速拆装,方便运输,四周安装有防撞条,且浮体内充满发泡材料,有效提高船体的抗撞性和抗沉性(如图3所示)。
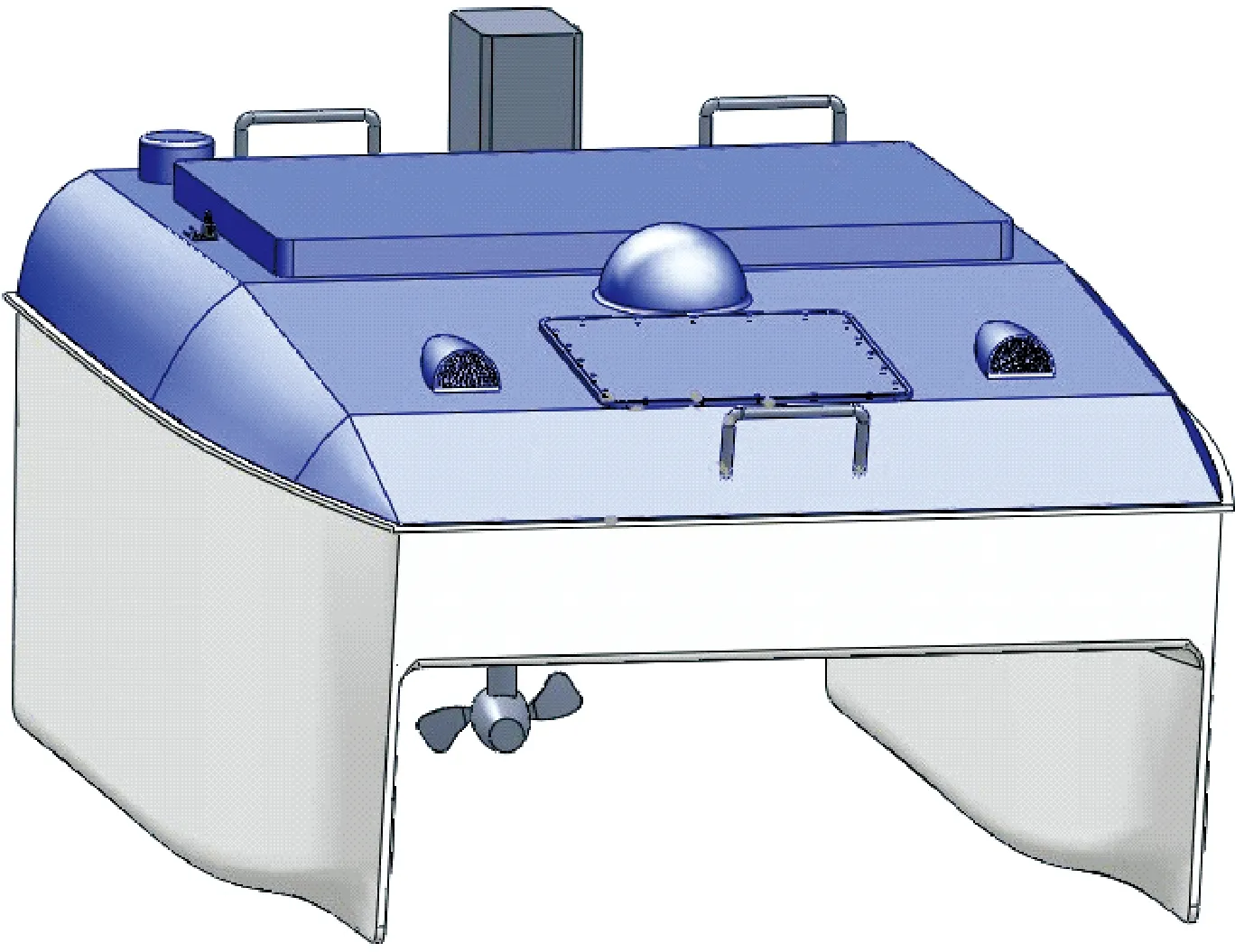
图3 船体设计示意
3.2 中央控制板
中央控制板是整个无人测控船的大脑,需要中央处理芯片与各功能模块进行实时交互,以满足对实时数据的处理、足够的抗干扰能力。因此,本设计选用基于ARM内核的16/32位微处理器STM32F103作为无人船的中央处理芯片。该芯片运行速率高达72 MHz,满足了中央控制板高速处理数据的要求;多达5个USART接口、21路AD接口、3个SPI接口以及其他通信接口满足了多种传感器接入的需求;片内集成的Flash和SRAM,满足了嵌入式系统移植的需要,同时带有丰富的存储器外扩接口,方便存储器的外扩;嵌套式中断向量控制器(NVIC),支持多达60个向量中断,满足了中央控制板对控制信号实时响应的要求;112个通用I/O管脚,带可编程的上拉/下拉电阻,满足了与多种传感器接口连接的需要;11个通用定时器/计数器,带8路捕获输入和10路比较输出。满足了推进器、舵机等部件的控制需要。
3.3 电源管理模块
电源管理模块设计保障整个无人船电源的供应和控制。电源选用2块12 V 10 AH的锂电池供电,可提供瞬时60 A的电流,每块电池的重量仅0.8 kg,目前可实现5 h的续航。为满足不同传感器工作电压的需求,电源管理模块将电压分别转换为3.3 V、5.0 V、9.0 V和24 V,为减少功耗,设置了多个电子开关,关闭暂时不用的传感器电源。
3.4 运动控制模块
无人船的水下推进装置是整个系统研发的重点,其部件选择的好坏,直接关系到整个系统研制的成败。采用舵机+连杆+轴承的转向装置(如图4所示)。推力大小可调节,可以实现推进电机正反转,采用脉宽调制技术控制电调调整电压输出以实现电机转速和转向的调节,进而调节推力的大小和方向[9]。
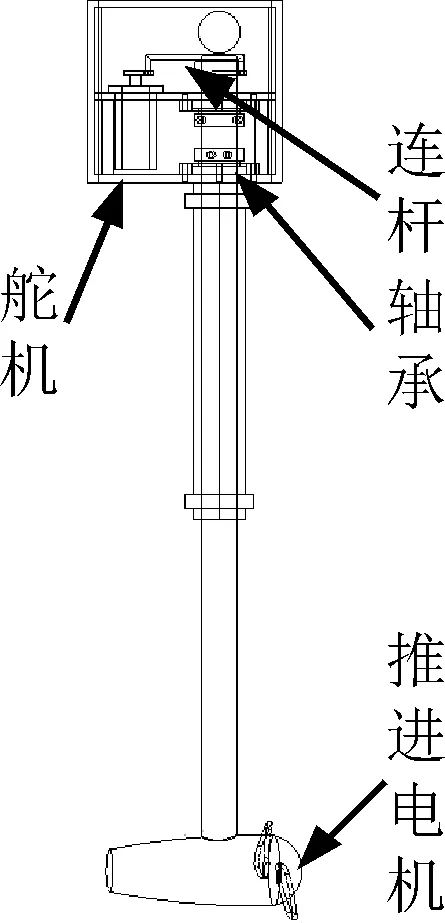
图4 运动控制模块剖面示意
3.5 水质监测模块
设计的数据在线采集系统采用STM32作为主控制器,实现控制各个传感器的数据采集和处理。由于使用的温度传感器、pH传感器、溶解氧传感器、电导率传感器和浊度传感器等仪器均使用RS232协议通信,构成了一个RS232通信协议的通信网络。
3.6 图像采集模块
该模块主要由网域4K高清摄像头和5G模块等组成。该模块服务于无人船所在水域环境的监测工作,能够实时识别障碍物,同时配合主控装置共同工作,从而实现自动避障功能。捕获的水域面上图像可通过5G网络传输到PC端,能够实现监视控制中心对水域环境的远程监控。
3.7 超声波测距模块
设计测量距离可达10 m,采用的超声波探测夹角只有15°,与大多数的超声波是60°不同,可以提高超声波测量角度分辨率,是无人船等应用领域避障导航方案的首选。
4 系统软件设计与实现
4.1 中央控制板
中央控制板的软件包括以下几个部分:实时多任务嵌入式操作系统uCOS-Ⅱ的移植、外围接口驱动成序的开发以及无人船运动控制程序的开发。无人船运动控制程序又分成两部分:控制任务和通信任务,其结构如图5所示。
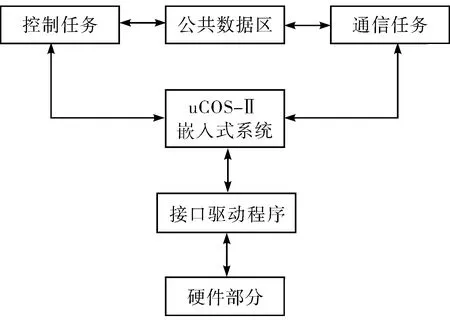
图5 中央控制板软件结构
1) 控制任务
主要功能包括:外围传感器信息的获取、无人船状态检测及报警、无人船运行控制算法的运算、推进系统的控制、水下地形的测量、数据的处理和存储。
对于无人船这样的非线性、时变系统,采用的控制方法主要是神经网络和模糊逻辑控制等。本设计采用简单实用的S面控制算法, 此方法将模糊控制的思想与PID的简单控制结构相结合。
2) 通信任务
通信任务负责无人船通过无线通信模块与手动控制终端或监控中心进行数据与指令的交互,主要完成以下功能:无线通信的初始化和通信链路维护、数据的接收和处理、公用数据区要发送数据的处理与发送。
4.2 系统监控软件
为了更好的控制无人船对水样进行采集,设计了一个能实时操作、稳定性好、交互界面友好的无人船操作软件。该软件采用C#语言编写,在VS2019环境下编译完成。此环境集成了大量实用的类库,高效地实现了无人船数据的实时读取和显示(如图6所示)。
5 关键技术及创新点
1) 基于高精度定位的无人船自动避障智能导航技术
启用智能导航技术与航迹规划相结合,既可在无人工设定的情况下自主设置采样路线及自动导航,也可遥控无人船和根据预设的航迹规划执行航行测量,替代人力作业,提高效率与精度。船体定位与姿态测量采用差分GPS[10]、三维电子罗盘、AHRS姿态传感器相融合算法,不依赖于国家固定基站,定位精度小于0.02 m,当船体在小范围进行旋转运动时,通过三维电子罗盘仍可精确定位船体及航向[11]。船体采用模块化设计,可扩展性强,具有自动漏水检测、超声波自动避障等功能,在复杂水面可以畅通无阻,尤其是在浪比较大情况下,保持相对更稳定的航行,能获得高质量的测量数据。
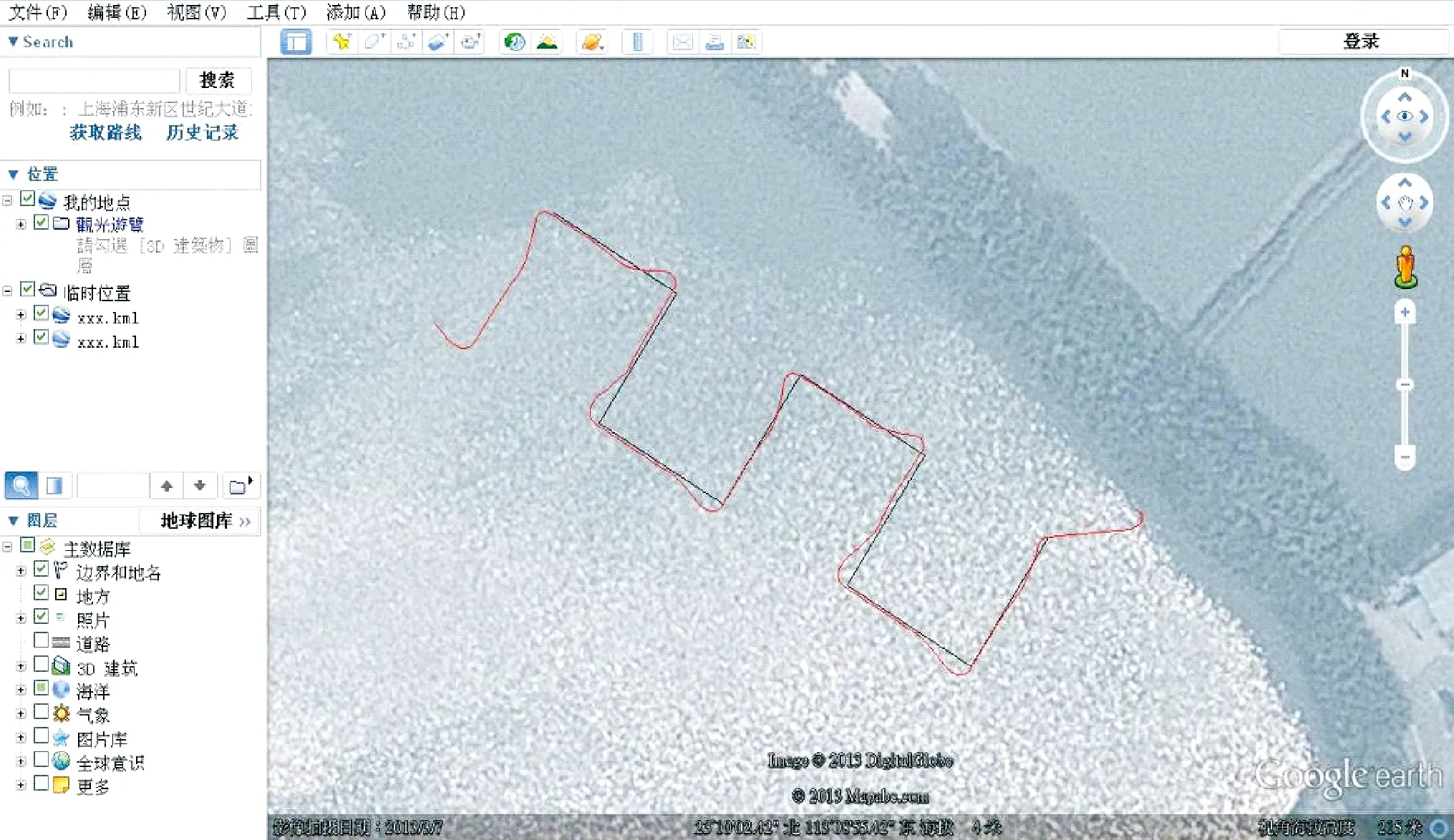
图6 软件界面示意
2) 水生态信息多要素实时在线监测技术
无人船采集水体的图像信息,基于图像识别算法使无人船具备识别分析水体颜色及水体漂浮物密度等信息,可记录及拍摄水质采样监测的时间、地点,对采样和监测数据进行存储、处理,并且为运动避障和污染源取证提供智能辅助及判断。无人船平台可以搭载和集成采样系统、多参数水质在线分析仪、水文传感器和水生生物全息显微观测系统在无人船平台上使用,实现水样采集、水质等水生态信息的实时监测,同时实时测量船体的俯仰角和横滚角,并能输出波高数据,进而有效修正监测数据,提高测量精度,实现精准智能的水生态多要素实时监测。
3) 实时获取被监测数据
借助云计算、大数据技术对水质、水文等进行分析,通过图形化组态软件,实现数据可视化和预警预报。
6 结语
无人船技术助力河湖监管与保护,搭载多种功能的采集与分析仪器设备[12],具备自主规划、自动导航、环境感知、智能避障、远距离通信、模式识别、视频实时传输和网络化监控等功能,实时传输水文水质等监测数据至云服务器,为水污染防治及河湖强监管提供有力的数据支撑,是河湖水生态科学管控、智慧管理、高效运行的技术支撑和保障手段。
随着科学技术不断的发展,不断地改进智能无人船技术和质量,进一步加强模块化设计功能,扩展更多更复杂的传感器进行更加细致的河湖水生态信息监测,为河湖强监管发挥越来越大的作用。
