多相交错并联自均流高增益DC/DC变换器及其控制策略
2021-03-02章治国徐堂意向林朋王强
章治国,徐堂意,向林朋,王强
(1.重庆理工大学 电气与电子工程学院,重庆 400054;2.重庆市能源互联网工程技术研究中心,重庆 400054;3.深圳市博敏电子有限公司,广东 深圳 518103)
0 引 言
随着传统能源日益消耗以及由此带来环境污染问题,人类对新能源的利用开发已是迫在眉睫。太阳能和氢能作为两种重要新能源,其主要利用方式为光伏发电和燃料电池发电[1-6]。然而,光伏、燃料电池产生的直流输出电压较低,很难被直接利用,往往需要高效高增益DC/DC变换器将其电压提升到所需要的电压等级。一般而言,高增益DC/DC变换器可分为隔离型和非隔离型两种,对于隔离型高增益DC/DC变换器易通过变压器匝数比来实现较高的电压增益,但是由于隔离变压器的存在使得变换器体积较大、成本高和磁通易饱和等问题[7-9]。
非隔离型高增益DC/DC变换器根据其升压原理不同一般可以分成级联型、开关电容型、耦合电感型、交错并联型等几种形式。级联型高增益DC/DC变换器利用两个或多个Boost变换器串联的方式来获得更大的电压增益;虽然该类变换器构成简单,但是后级所用器件开关应力大且控制系统不好设计[10]。开关电容型高增益DC/DC变换器利用储能电容来实现变换器的高增益目的,但随着功率等级的提高需要更多的高耐压储能电容,这不仅使得变换器体积变大,还会让电路产生较大的开关损耗和严重的电磁干扰问题[11-14]。耦合电感型高增益DC/DC变换器通过多绕组耦合电感的匝数比来实现高增益目的,其功率开关虽有较低的电压应力,但多绕组耦合电感中不可避免地存在漏感,漏感不仅会降低变换器的效率,抑制漏感的措施还会使得变换器结构复杂,成本增加[15-16]。交错并联型高增益DC/DC变换器其具有输入电流纹波小,电压增益高,开关管电压应力低,开关损耗小等优点,非常适合于低压大电流输入、高压输出的场合[17-20]。文献[19]提出一种新型交错并联双向DC/DC变换器,实现了具有交错式的变换器输入电流纹波小,开关应力小等优点,但是拓扑结构上只有两相,使得电压增益有限,控制方式单一。文献[20]就M相拓展占空比升压变换器采用固定的移相2π/M对开关管进行控制,讨论了输入/输出电压增益与占空比D之间的关系,其中占空比D在(M-1)/M≤D< 1范围内每相电流都相等,电压增益为M/(1-D)。但是,随着相数M的增加,采用该移相控制要使得每相电流相等就会导致变换器工作占空比范围变窄,应用范围受到限制。
基于以上问题,本文在研究多相交错并联高增益DC/DC变换器工作机理及均流条件的基础上,提出一种可变移相的控制策略,该控制策略只要求相邻两相的相移φ满足2(1-D)≤φ≤ 2πD条件即可使得变换器能够在[0.5,1)占空比范围内保持电压增益不变且能实现自动均流,其均流条件与变换器的相数无关。论文随后详细分析了该变换器的输出/输入电压增益、各相电流以及开关器件应力。最后搭建了一台低压输入(约3.3 V)/高压输出(约48 V)、功率为300 W的四相交错并联的实验样机,实验结果验证了所提控制策略的有效性和正确性。
1 M相交错并联高增益变换器及均流控制策略
1.1 拓扑结构
如图1所示是M相交错并联高增益DC/DC变换器拓扑结构。其中C1、C2、…、CM-1为M-1个开关电容;CM为输出滤波电容;L1、L2、…、LM为M个升压电感;S1、S2、…、SM为M个下臂开关管;SS1、SS2、…、SSM为M个上臂开关管;Ro为负载电阻。为了简化分析,对图1所示的电路做出如下假设:1)每相电感量相等,即L1=L2=…=LM=L;2)所有的开关管等器件均为理想器件,忽略开关损耗,且导通和关断瞬间完成;3)开关电容值相等,即C1=C2=…=CM-1=C。

图1 M相交错并联高增益DC/DC变换器
为方便后续的理论分析,对M相交错并联高增益DC/DC变换器做以下假设:1)变换器的控制方式采用同步整流形式,即S1与SS1、S2与SS2、…、SM与SSM采用互补导通方式,忽略上下臂开关管的死区时间;2)下臂开关管S1、S2、…、SM采用移相依次导通控制方式,其开关周期T与占空比D均相同;对应的上臂开关管SS1、SS2、…、SSM的开关周期为T,其占空比为1-D;3)电感L1、L2、…、LM电感量足够大,电路工作于电流连续导通模式。
1.2 各相均流原理与控制
图2所示的是M相交错并联高增益DC/DC变换器(图1所示)中下臂S1、S2、…、SM开关管导通时序图,其中t21为下臂开关管S1与S2导通时间差,t32为下臂开关管S2与S3导通时间差,…,tM(M-1)为下臂开关管SM-1与SM导通时间差。图3所示的是流过开关电容C1、C2、…、CM-1的电流波形示意图。其中t1、t2分别为iL1、iL2流经电容C1的时间,t3、t4分别为iL2、iL3流经电容C2的时间,…,t2(M-1)-1、t2(M-1)分别为iL(M-1)、iLM流经电容CM-1的时间。

图2 M相下臂开关管移相导通时序
结合图1和图2可以看出,当S1关断,则SS1开通,若S2是导通的,则流过电感L1的电流iL1必流向电容C1,此时iC1=iL1。当S2关断,则SS2开通,流过电感L2的电流iL2必流向电容C1,此时iC1=-iL2。如图3所示。在下面的分析中,大写字母表示变量的平均量,对电容C1在一个周期T内由安秒平衡原理可得

图3 开关电容C1、C2、…、CM-1电流波形示意图

(1)
若要使IL1=IL2,则需t1=t2。由于S1与SS1、S2与SS2、…、SM与SSM采用互补导通方式,当S2关断时,SS2是开通的,因SS2开通时间为(1-D)T,从而有t2=(1-D)T;当S1关断时,SS1是开通的,时间t1取决于SS1在开通时段内S2导通的时间,由于下臂开关管S2的导通时间为DT,如要使t1=t2,这就必须要满足
DT≥(1-D)T。
(2)
则
D≥0.5。
(3)
在D≥0.5的条件下,还需满足下臂开关管S1、S2导通相位要求,即在S1导通,设经过时间t21后,S2开始导通,若要保证DT≥(1-D)T,则时间t21要满足:
(4)
从而可得
(1-D)T≤t21≤DT。
(5)
对于开关电容C2,其分析过程与电容C1类似。在D≥ 0.5且(1-D)T≤t21≤DT时,则流经电容C2的电流只有iL2与iL3,如图3所示。对电容C2在一个周期T内由安秒平衡原理可得
(6)
若要使得IL2=IL3,则需t3=t4。由拓扑结构导通方式可以确定时间t4=(1-D)T。时间t3的大小取决于SS2在开通的时间(1-D)T内S3导通的时间,同理,可得出D≥0.5。此外下臂开关管S2、S3还需满足导通相位要求,即在下臂开关管S2导通后,经过时间t32后S3开始导通,则时间t32要满足条件:
(7)
由上式可得
(1-D)T≤t32≤DT。
(8)
依次类推…,对于开关电容CM-1,满足D≥0.5且相邻两下臂开关管S1、S2、…、SM-1之间开通时刻之差在[(1-D)T,DT]范围内,由图2、3可得当下臂开关管SM-1、SM导通时间差值tM(M-1)满足:
(9)
即
(1-D)T≤tM(M-1)≤DT。
(10)
再由电容CM-1在一个周期T内的安秒平衡可得IL(M-1)=ILM。从而可获得各相电感电流的平均值都相同,即
I1=I2=…=IM-1=IM=I。
(11)
由以上分析可知,各相电感电流相等的限制条件为:
1)占空比D范围为0.5 ≤D<1;
2)两相邻下臂开关管的导通时间差需在[(1-D)T,DT]内,即两相邻下臂开关管导通相位相差φ需满足
2π(1-D)≤φ≤2πD。
(12)
2 稳态性能分析及参数计算
2.1 电容及电感参数计算
图1所示的开关电容C1、C2、…、CM-1在变换器中承担着能量传递的作用。在一个开关周期T内,其一段时间存储能量,在另一段时间内释放能量。当下臂开关管占空比在0.5 ≤D< 1范围内且相邻两相相位差在2π(1-D)≤φ≤2πD范围内时,开关电容C1、C2、…、CM-1在一个开关周期内的电压波形图,其分为4个主要阶段:1个充电阶段、2个恒压阶段、1个放电阶段,如图4所示。
由电容的安秒平衡原理及各相电流平均值相等,则可以确定图4中的充电、放电阶段的时间t1=t3=(1-D)T。恒压阶段1、2会随着φ的取值不同,其阶段时间t2、t4随之有所不同。图中Δv为电容一个开关周期内电容充放电的电压波动值。由电容的安秒平衡可知,其充电电压增量Δv等于其放电电压减少量
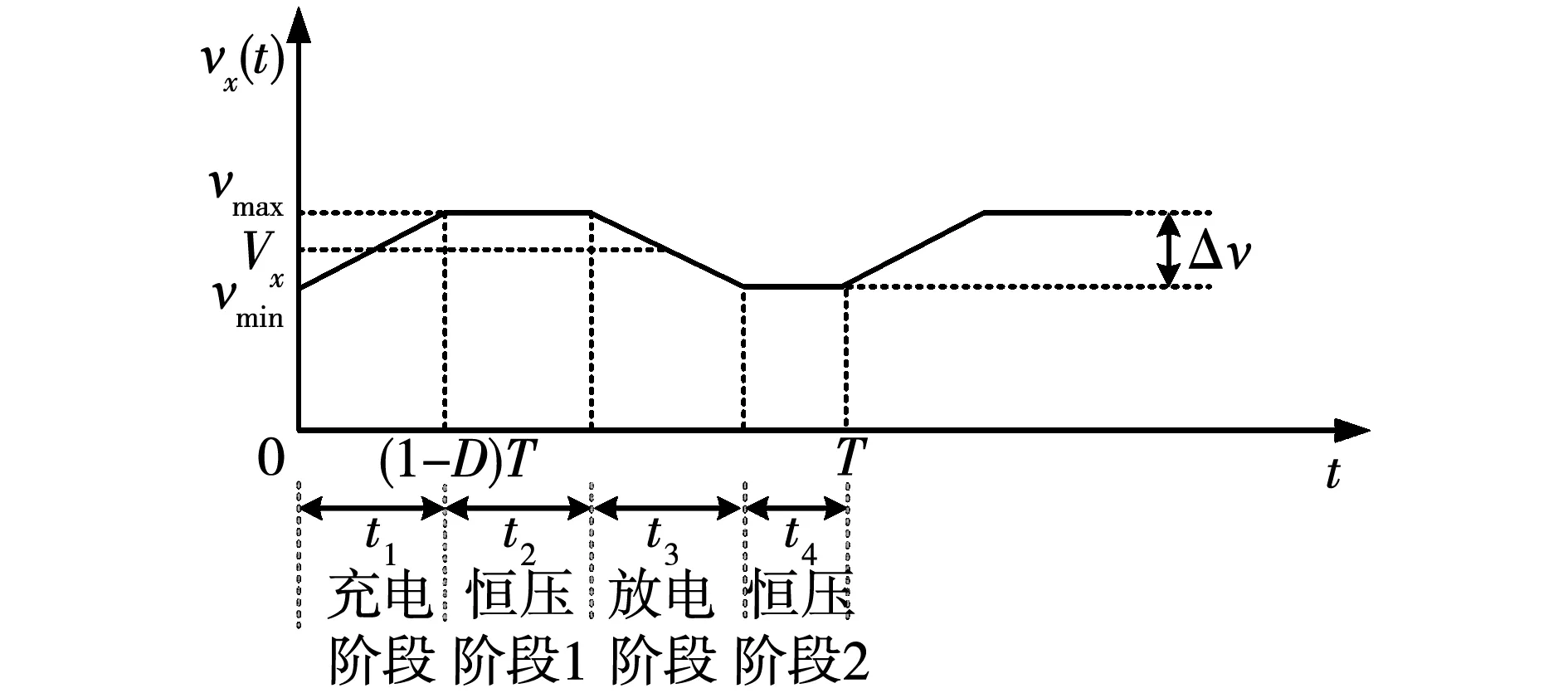
图4 一个开关周期T内开关电容电压波形
(13)
各级开关电容C1、C2、…、CM-1电容值大小可以通过式(13)确定。理论上各级开关电容C1、C2、…、CM-1电容值的大小对电路运行性能没有太大影响,但其值越大时,Δv就越小,若其值选择较小,则会导致电容电压的峰值过高。在开关电容充电开始到电容放电结束这一时间段内,可以用其平均电压量Vx来代替这一阶段的瞬时电压,其中Vx(x=1、2、…、M-1)可以表示为
(14)
而最后一级输出电容CM值可由输出电压纹波Δvo来确定为
(15)
根据图1所示,对于电感L1、L2、…、LM电感量可由每相电感电流的纹波Δi来确定,即
(16)
2.2 稳态电压增益
当下臂开关管占空比在0.5≤D<1范围内且相邻两相相位差在2π(1-D)≤φ≤2πD范围内时,变换器达到稳态时,根据电感的伏秒平衡原理和电容的安秒平衡原理可以得到:
(17)
(18)
由式(17)、式(18)分别可得:
(19)
Vo=MVg/(1-D)。
(20)
I1=I2=…=IM-1=IM=I=Io/(1-D)。
(21)
由式(20)、(21)可以看出,当采用该控制策略变换器达到稳态时,每相电感电流平均值均相等且均为Io/(1-D),该变换器输出电压/输入电压增益为M/(1-D)。
2.3 开关器件应力分析
如图1所示变换器工作达到稳态,当下臂开关管占空比在0.5≤D<1范围内且相邻两相相位差在2π(1-D)≤φ≤2πD范围内时,可以得到如下结论。
1)开关管的电压应力。
下臂开关管S1、S2、…、SM对应的最大电压应力分别为v1、v2-v1、…、Vo-vM-1;上臂开关管SS1、SS2、…、SSM-1、SSM对应的最大电压应力为v2、v3-v1、…、Vo-vM-2、Vo-vM-1。并结合式(19)、(20)可以得到:
(22)
(23)
2)开关管的电流应力。
流经上臂开关管SS1、SS2、…、SSM的电流分别为各相电感电流iL1、iL2、…、iLM;流经下臂开关管S2、…、SM的电流为相邻两相电感电流之和分别为iL1+iL2、iL2+iL3、…、iL(M-1)+iLM;流经下臂开关管S1的电流为iL1。
考虑到各级开关电容电压v1、v2、…、vM-1的波动及各相电感电流iL1、iL2、…、iLM纹波值,以获得上下臂开关管对应的最大电压、电流应力分别如表1所示。其中Δv为电容一个开关周期T内开关电容充放电的电压波动值,如式(13)所示;Δi为电感电流纹波值。

表1 开关器件应力
3 四相交错并联高增益变换器及控制
3.1 工作原理
为深入分析该变换器详细的运行情况,下面以四相交错并联高增益变换器为例进行论述,如图5所示为四相交错并联高增益DC/DC变换器。为分析方便,不妨定义下臂开关管S1、S2、S3、S4的导通状态用1来表示,开关管S1、S2、S3、S4关断状态用0来表示,这样S1S2S3S4=1111代表下臂开关管S1、S2、S3、S4全导通;S1S2S3S4=0000代表下臂开关管S1、S2、S3、S4全关断。若下臂开关管S1、S2、S3、S4占空比在0.5≤D<1范围内且相邻两相相位差在2π(1-D)≤φ≤2πD范围内,则在一个开关周期T内只会出现如下几种组合方式:S1S2S3S4=1111,S1S2S3S4=1110,S1S2S3S4=1101,S1S2S3S4=1011,S1S2S3S4=1010,S1S2S3S4=0111,S1S2S3S4=0110,S1S2S3S4=0101。其对应的电路模态的等效电路如图6所示。

图5 四相交错并联高增益DC/DC变换器
在下臂开关管占空比在0.5≤D<1范围内,由于占空比D的不同及相邻两相的相位差不同,其模态就会不同。下面仅以占空比2/3 1)模态1[t0~t1]:如图6(d)所示,在此时段内S1、S3、S4、SS2导通,S2、SS1、SS3、SS4关断,Vg对电感L1、L3、L4充电,电感电流iL1、iL3、iL4线性增大;电感L2和电容C1一起对电容C2充电,电感L2电流iL2减小,电容C1电压v1下降,电容C2电压v2上升;电容C4为负载Ro供电;电容C3电压v3保持不变。 2)模态2[t1~t2]:如图6(c)所示,在此时段内S1、S2、S4、SS3导通,S3、SS1、SS2、SS4关断,Vg对电感L1、L2、L4充电,电感电流iL1,iL2、iL4线性增大;电感L3和电容C2对电容C3充电,电感L3电流iL3减小,电容C2电压v2下降,电容C3电压v3上升,电容C4为负载Ro供电;电容C1电压v1保持不变。 3)模态3[t2~t3]:如图6(b)所示,在此时段内S1、S2、S3、SS4导通,S4、SS1、SS2、SS3关断,Vg对电感L1、L2、L3充电,电感电流iL1、iL2、iL3线性增大;电感L4和电容C3对电容C4充电以及为负载Ro供电,电流iL4减小,电容C3电压v3下降;电容C1、C2电压v1、v2保持不变。 4)模态4[t3~t4]:如图6(g)所示,在此时段内S2、S3、SS1、SS4导通,S1、S4、SS2、SS3关断,Vg对电感L2、L3充电,电感电流iL2、iL3线性增大;电感L1对电容C1充电,电感电流iL1减小,电容C1电压v1下降;电感L4和电容C3对电容C4充电以及为负载Ro供电,电感电流iL4减小,电容C3电压v3下降;电容C2电压v2保持不变。 5)模态5[t4~t5]:如图6(f)所示,在此时段内S2、S3、S4、SS1导通,S1、SS2、SS3、SS4关断。Vg对电感L2、L3、L4充电,电感电流iL2、iL3、iL4线性增大;电感L1对电容C1充电,电容C1电压v1上升,电感电流iL1减小;电容C4为负载Ro供电;电容C2、C3电压v2、v3保持不变。 图6 各模态的等效电路 根据上述控制方式下的电路模态,可以得到一个开关周期T内该变换器的主要波形图,如图7所示。 图7 电路主要波形示意图 通过上述分析可知,为实现变换器各相自均流且可对输出电压调整就需要对占空比及移相进行控制。本次实验采用的控制芯片是TI公司高性能微控制器,型号为TMS320F28027。其控制方案主要包括2个方面:一是将下臂开关管作为主开关管进行脉宽调制(pulse width modulation, PWM)控制,上、下臂开关管采用同步整流形式,即S1与SS1、S2与SS2、…、SM与SSM采用互补导通方式;二是对下臂开关管S1、S2、…、SM采用移相依次导通控制。首先对输出电压采样,采样后的电压与参考电压进行比较,比较后的差值经过数字PID调节后,经PWM模块的占空比寄存器和时基模块的相位寄存器,输出上、下臂互补的开关管驱动波形。此外,对输出电压Vo进行监测,当输出电压超过设定值,将停止PWM输出,实现对电路保护。 为了验证上述分析,搭建了一个四相300 W的实验样机。实验参数如下:低压输入3.3 V,开关频率为fs=200 kHz;各相电感都为1.2 μH;由式(13)选取各级开关电容C1、C2、C3都相同,为6.6 μF;设计输出电压纹波为输出电压Vo的0.1%,经计算电容C4约为400 μF,实际电路中采用18个22 μF电解电容与3个2.2 μF陶瓷电容并联组成输出电容C4为402.6 μF;在开关管的选取上,充分考虑了输入大电流(每相最大电流约30 A),及出现的电压尖峰的缘由,上、下臂开关管选取了英飞凌公司的型号为IPB042N10N3(100 V/137 A)MOSFET管。在实验测试中,对下臂开关管采用固定占空比(D=75%)、不同相移的控制方式。 图8为不同移相控制方式的下臂开关管的驱动波形。其中图8(a)为相邻两下臂开关管S1、S2、S3、S4都是移相2π(1-D);图8(b)为相邻两下臂开关管S1、S2、S3、S4都是移相2πD;图8(c)为相邻两下臂开关管S1、S2、S3、S4移相都不相同分别为0.6π、π、1.4π控制。 图8 不同移相方式下臂开关管驱动波形 图9为不同移相控制方式下各级开关电容C1、C2、C3电压实验波形。由电容安秒平衡原理并结合拓扑结构及实验参数的设计,每相电流的大小可以通过图9电容电压波形v1、v2、v3的充放电时间来间接反映出来。从图9(a)、(b)、(c)可以看出,t1≈t2≈1.25 μs,t3≈t4≈1.25 μs,t5≈t6≈1.25 μs;由于开关电容C1、C2、C3电压波形的充放电时间t1≈t2≈t3≈t4≈t5≈t6≈1.25 μs,所以各相电感电流平均值均相等,即实现了均流功能。 图9 不同移相方式开关电容C1、C2、C3的电压波形 图10为不同控制方式下电容C1、C2、C3的电压v1、v2、v3及输出的电压vo的波形。图10(a)为移相2π(1-D)情况的波形图,从图10(a)可以看出V1≈13 V、V2≈25 V、V3≈36 V、Vo≈47 V。图10(b)为移相为2πD情况的波形图,从图10(b)可以看出V1≈12 V、V2≈24 V、V3≈35 V、Vo≈47 V。图10(c)为分别移相0.6π、π、1.4π情况的波形图,由图10(c)可以看出V1≈12.5 V、V2≈24.5 V、V3≈35 V、Vo≈48 V。考虑到实际电路中寄生参数的影响,所测量值比理论中要低一些。但是通过实验数据可以看出,均流条件下的移相控制不会影响电压增益,V1、V2、V3、Vo之间的实际数据关系和理论分析一致。 图11、12分别为移相2π(1-D)控制方式上、下臂开关管电压应力波形。从图11可以看出下臂开关管S1、S2、S3、S4的最大电压应力分别约为18、20、20、19 V;从图12可以看出上臂开关管SS1、SS2、SS3、SS4的最大电压应力分别约为30、32、30、18 V。由图10(a)可以看出开关电容C1、C2、C3的电压纹波0量Δv≈8.5 V,再结合表1,可以得到理论计算得下臂开关管S1、S2、S3、S4的最大电压应力分别为17.45、21.7、21.7、17.45 V;上臂开关管SS1、SS2、SS3、SS4的最大电压应力分别为30.65、34.9、34.9、17.45 V。通过实验数据与理论计算值相比较可以得出理论分析的正确性。 图10 不同移相方式电容C1、C2、C3及C4的电压波形 图11 移相2π(1-D)的下臂开关管电压应力波形 图12 移相2π(1-D)控制上臂开关管电压应力波形 图13为四相交错并联高增益DC/DC变换器效率随输出功率变换率曲线图。由图13可知,该变换器的效率在150 W以内大于90%,但随着功率的增大其效率逐渐下降,这是由于变换器在低压大电流工作条件下开关器件的导通损耗所致,尽管如此在输出功率为300 W时变换器的效率约为86%。 图13 实测效率曲线 本文针对多相交错并联高增益DC/DC变换器采用固定相移控制方式会随着相数M的增加其只能在有限占空比范围[(M-1)/M,1]内实现均流的问题,提出一种可变移相的控制策略,该控制策略只要求相邻两相相移φ满足2π(1-D)≤φ≤2πD即可使得M(M≥2)相交错并联高增益变换器能够在[0.5,1)占空比范围内实现自动均流,其均流条件与变换器的相数无关。在此控制策略下,详细分析了该变换器的输出/输入电压增益、各相电流以及开关器件应力。最后搭建了一台四相功率300 W的实验样机,实验结果验证了所提控制策略的有效性和正确性。 由于该变换器不仅输入电压低且其输入/输出电压变比很大(约14.5),工作时运行在较大占空比,在较大功率运行条件下其开关管导通损耗和磁元件损耗均较大,因而效率偏低(约86%)。为进一步提升变换器的效率,需要重新优化设计磁元件或增加并联数,来减小占空比,降低导通损耗。此外,本文所提方法与传统固定相移控制方式相比,其输入电流纹波稍大。

3.2 控制实现
4 实验结果及分析






5 结 论
