航空航天类专业制导控制室内外半实物仿真实验技术研究与应用
2021-03-01陈柏霖王正平
王 伟,陈柏霖,高 峰,王正平,王 辉
(北京理工大学a.宇航学院;b.资产与实验室管理处,北京 100081)
0 引言
针对航空航天类专业制导控制的学校室内半实物实验室主要以多轴动态转台为基本硬件平台,PC机为软件平台,可实现常规的弹道轨迹、运动控制等实验,涉及高动态飞行器总体设计、飞行力学、制导控制等知识。为使实验教学内容更具内涵、创新性、科学性[1]等特点,本着新时代高效育人,重在培养高素质综合性拔尖创新人才[2-4]等目标,通过校企联合的方式,研发了制导控制室内外半实物仿真实验平台,将具有特色的室外复杂环境、火箭撬、干扰和抗干扰多项措施转化为航空航天类专业的本科和研究生教学。该平台在室内采用导引头追踪激光目标模拟器,可加深学生对飞行器制导控制概念和运动学、动力学模型[5-7]的理解。在校外火箭撬平台,以学习高动态飞行器姿态控制和制导控制[8]为主要目标,不仅可直观观测目标运动变化,也可通过仿真机实时观测弹道及飞行器姿态等。室内外半实物仿真实验教学系统可为航空航天类专业的学生提供课程设计、毕业设计、综合性实验、创新性实验,深化对航空航天类专业知识的理解,增强学生的动手能力,激发学生对制导控制的积极性及好奇心,为培养国防拔尖人才提供实验支撑。
1 制导控制半实物仿真系统
1.1 半实物仿真实验设备组成
制导控制室内半实物仿真实验实物如图1 所示。主要分为以下几个部分:

图1 室内半实物仿真图
(1)3 轴立式转台+2 轴转台;
(2)仿真与控制计算机;
(3)导引头;
(4)激光模拟器及漫反射幕布。
1.2 教学知识点
结合半实物仿真平台的教学用途,学生通过该仿真实验可以了解及掌握的知识点有。
(1)3 轴立式转台和2 轴转台工作原理;
(2)弹体运动学和动力学模型构成与搭建;
(3)目标运动学模型搭建与设计;
(4)弹目相对运动学模型搭建与设计;
(5)导引头制导控制工作原理和模型设计;
(6)激光模拟器及漫反射幕布工作原理和相关模型。
1.3 工作流程
激光照射器将光束照射到漫反射幕布上,导引头[9-10]接收漫反射幕布上光斑的位置信息,经解算后传给仿真机。仿真机将计算出的2 轴转台和3 轴转台的运动信息传输到各自控制柜的下位机,经信息解算后控制2 轴转台和3 轴转台的运动[11]。半实物仿真以3 轴转台模拟弹体姿态运动,转台外框、中框和内框分别对应导弹的偏航、俯仰和滚转运动,2 轴转台模拟目标运动规律[12],由仿真模型通过串口通信为3 轴转台提供姿态角或姿态角速度指令,控制系统用来测量俯仰和偏航方向的角速率陀螺安装于内框,随弹体旋转,所测信号为旋转弹体陀螺坐标系的角速率信号[13],由转台滑环将该信号线引至数据采集系统,经采集后提供给仿真机。仿真机实时仿真程序实时定时中断服务程序周期最短可设置为0.1 ms,本方案默认固化设置为1 ms。整个实时任务程序架构和基本工作流程如图2 所示。

图2 半实物仿真系统流程框图
2 室内外半实物仿真教学系统
2.1 室内激光制导半实物仿真系统
室内激光制导半实物仿真系统如图3 所示。

图3 室内激光制导半实物仿真系统框图
2.2 室外图像制导半实物仿真系统
室内仿真系统能够完成制导控制系统的大部分功能测试与仿真,随着战场环境的复杂性,越来越要求飞行器能够在复杂背景下正常使用,利用开放的室内外结合的半实物仿真。
电视/红外导引头仿真测试系统需要提供的实验环境包括:
(1)为导引头提供姿态角度运动;
(2)为导引头提供目标运动环境或弹目相对运动环境;
(3)提供照射机和真实目标物理环境。
此3 项分别用3 轴转台、移动目标模拟系统和移动目标试验平台实现物理模拟。依据以上分析,导引头仿真测试系统主要由移动目标模拟系统、导引头姿态模拟系统(以3 轴电动转台为主要设备)、仿真计算机系统、实时通信接口系统、移动目标试验平台系统(时统、速度与位置实时监控)等部分组成。图4 所示为采用外场设备进行导引头测试的仿真测试系统框图。

图4 采用外场设备进行导引头测试的半实物仿真系统框图
主要仿真设备包括:
(1)移动目标模拟系统:可见光目标模型靶板、红外整列靶板;
(2)导引头姿态模拟系统:3 轴电动转台;
(3)移动目标试验平台系统。
2.3 火箭撬的移动目标试验平台
(1)火箭撬总体方案。火箭橇[14-15]总体技术方案为:①运动过程分加速段、续航段、滑行段及制动段;②固体火箭发动机;③反向火箭运动机制;④地面触发和电子延时发火机构的双重制动点火保险;⑤采用微推偏喷管技术,降低质心高度,左右对称,减小力矩作用;⑥简易导轨结构等[16]。
(2)火箭撬位置与速度实时测量系统。在仿真的每一帧里都需要火箭橇的位置和速度作为已知参数,以供弹目视线的解算和视线角的实时复现。
(3)火箭撬实验平台时间统一系统。火箭橇试验系统与其它仿真设备之间存在时间统一的问题,在系统中需设计专门的时统系统,或统一使用卫星高精度授时,完成系统的时间同步。
2.4 移动目标模拟系统
移动目标模拟系统可以模拟慢速移动目标和快速移动目标。移动目标模拟是全系统的关键,其系统设计主要包括红外目标模拟系统[17](点红外阵列靶板、控制计算机、图形计算机等)、可见光目标模型靶板[18-19]。红外目标模拟系统,包括模拟器本体(由场景发生器、测量标定系统、控制计算机以及相关通信设备组成)、控制计算机和红外整列靶板。可模拟红外目标场景图像、目标/场景的红外辐射特性,外场红外整列目标靶板主要通过一定空间频率的目标与背景温差的红外辐射信号,为被评定红外成像单个靶元的精确系统提供定量的目标,用于红外系统的空间及温度分辨率的鉴定,也可用于对激光波束的漫反射体。
3 软 件
3.1 仿真软件配置
整个仿真软件系统采用windows xp多任务操作系统为主平台操作系统,内嵌RTX 嵌入式实时操作系统。上层任务系统采用Visual Studio 6.0 的MFC 编程,提供人机界面和任务管理。下层采用C 语言编程,编译成*.rtss格式的实时任务程序。学生在程序内直接完成板卡的驱动初始化并设计符合C 语言标准的应用接口函数。
3.2 人机交互界面软件
人机交互界面。采用VS6.0 下MFC编程,采用面向对象编程模式,分4 个大的功能模块区,如图5所示。
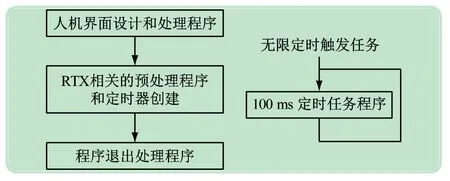
图5 上层任务程序框架
人机界面设计和处理程序,利用VC 标准控件设计,布局出可视化用户监视和操作处理界面。设计有过程状态数据参数监视区,过程仿真数据轨迹实时显示区,仿真参数和状态配置区,仿真任务启动停止操作等。DEMO示意设计界面如图6(a)、(b)所示。

图6 人机交互界面示意图
RTX程序预处理和定时器创建程序,为上下层任务程序创建数据交互的共享内存区,同时触发下层实时任务程序。创建定时器是为上层任务程序创建非实时的定时任务打下基础,可根据需要自行设置定时周期。定时任务程序用来进行各种过程数据采集和界面显示。
程序退出处理程序用来在关闭整个任务程序前对整个系统状态的预处理。比如终止下层实时任务程序,关闭清理退还已创建的共享内存。
3.3 下层实时软件
下层实时任务程序有3 个核心任务部分。其任务程序架构如图7 所示。

图7 实时任务程序架构
(1)实时任务程序架构和定时机制建立;
(2)各类硬件板卡驱动和接口函数;
(3)用户仿真时序程序和仿真数学模型代码。
4 半实物仿真实验验证
飞行器系统仿真模型包括飞行器自身弹体模型、气动模型、运动学和动力学模型等。在该环节设计带有落角约束的过重补比例导引律,设计带有改善高动态飞行器动态阻尼性能的双通道全解耦控制模型。目的是在解决高动态室内目标动态跟踪的前提下保证自身的姿态稳定,解决多类制导体制在不同海拔和转速下稳定飞行、跟踪并高精度命中目标。在该环节中设定纵向制导指令为0.36 g(g =9.8 m/s2),侧向制导指令为0 g,引入2 Hz的1 N·m的干扰力矩。对比不同转速下原弹体和阻尼回路的数学模型与弹上计算机模型的姿态角响应。对比不同转速下数学仿真与半实物仿真的姿态角响应曲线,如图8 所示。通过对图中数据分析,发现纵向通道和侧向通道解耦效果良好,有阻尼情况下的设计比无阻尼状态下的设计在动态特性上有较大程度的改善。

图8 不同转速下数学仿真与半实物仿真的姿态角响应曲线对比
对比不同射程下增加阻尼的对比情况如图9~12所示。经过数据分析,发现高动态飞行器的攻角、侧滑角、俯仰角、偏航角的加噪声有阻尼要比加噪声无阻尼改善60%以上,无噪声有阻尼比加噪声有阻尼改善60%以上,实现了不同高度和转速状态下的双通道稳定控制。

图9 半实物仿真攻角曲线
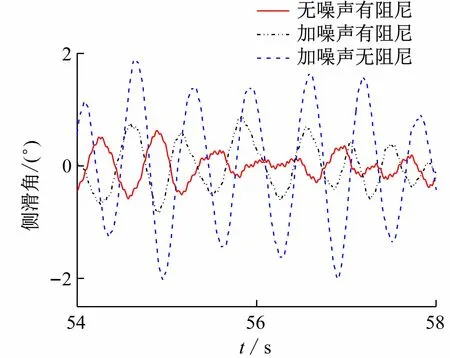
图10 半实物仿真侧滑角曲线
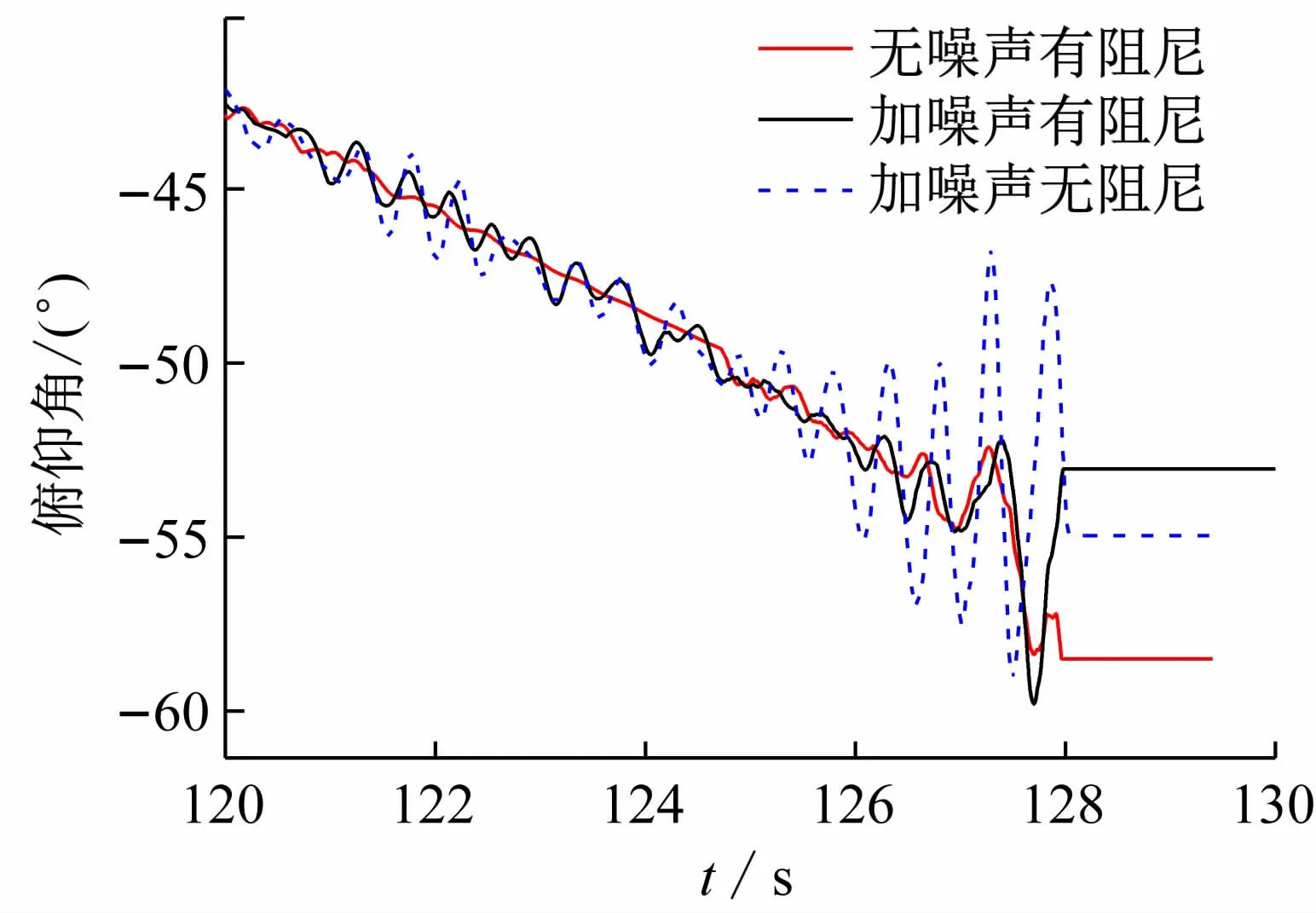
图11 半实物仿真俯仰角曲线
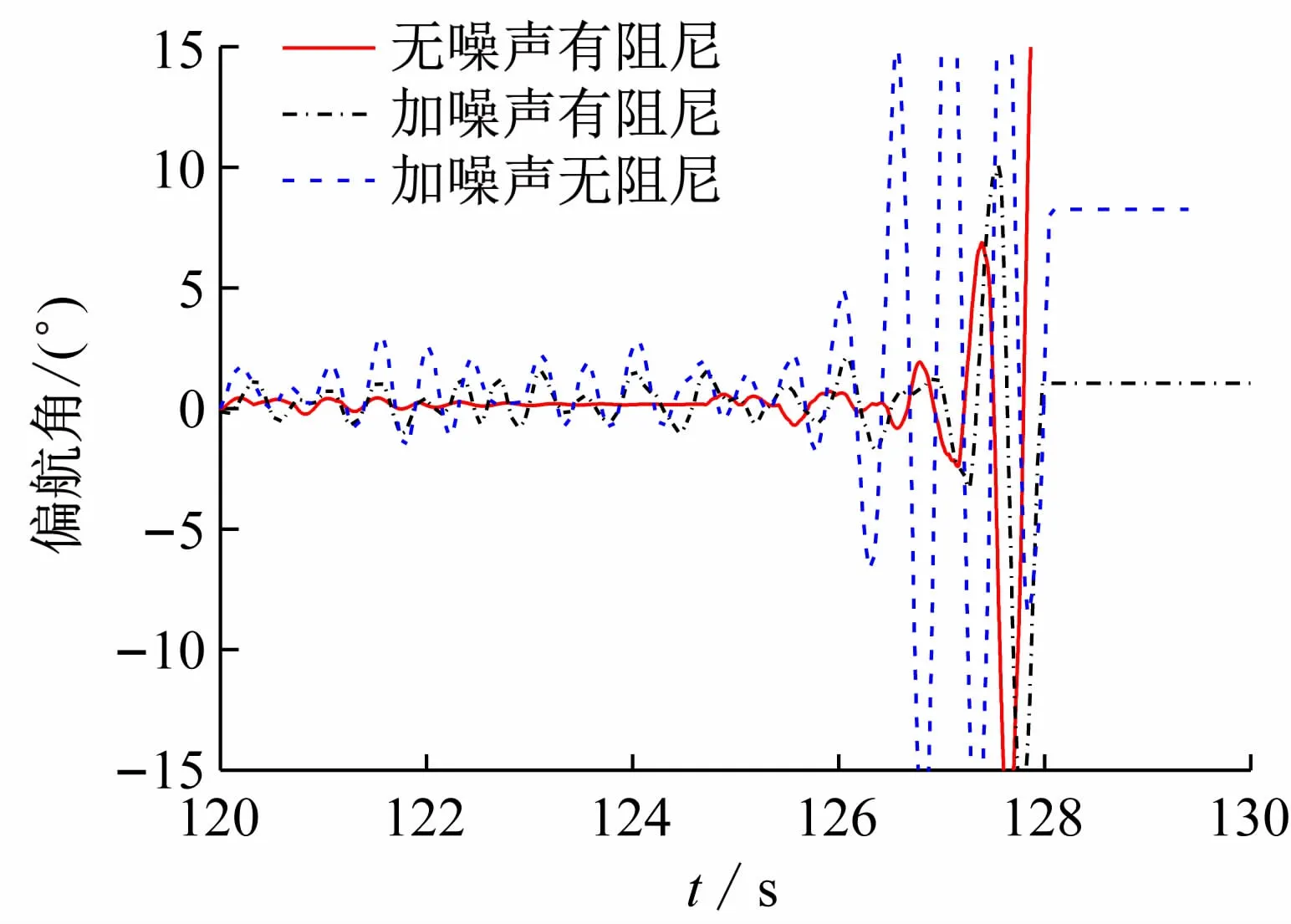
图12 半实物仿真偏航角曲线
5 半实物仿真实验系统教学实践
室内外半实物仿真系统建成后主要用于本科生高年级及研究生的课程实验、创新实验、毕业设计等,经过2 个学年的新型实验课程的教学,学生的团队协作能力、综合学习能力、创新设计能力、整体综合成绩均有显著提高。实验课程体系的题目设计与实现不仅体现了航空航天类系统建模与仿真的难点和特点,同时也针对不同层次的学生开展探索,可更好地因材施教,取得良好的教学效果,同时可进一步与无人飞行器嵌入式一体化自制实验仪器和飞行器虚拟仿真实验相结合。
6 结语
航空航天类专业制导控制室内、外半实物仿真实验教学系统,可通过系统设计、硬件搭建、软件设计、系统调试、仿真图像分析及外场火箭撬实验、抗干扰和效能评估等一系列实验,让学生对制导控制有全方位的认知与理解。平台的搭建,不仅可以满足制导控制设计与仿真的要求,同时在航空航天领域的教学科研中也发挥了重要的作用。经过该课程培训的学生多次获得国家电子设计竞赛一等奖、北京市电子竞赛一等奖和国际阿布扎比无人机比赛金奖等。实验探索将科研与教学深度融合,充分利用互联网时代的教育多元性,有利于培养航空航天领域方向的复合型拔尖人才,提升我国航空航天类人才培养的层次,同时还可以提升航空航天、兵器类事业整体水平。
