电流体动力学打印柔性电子的实验系统研制
2021-03-01张礼兵黄风立宋海军
张礼兵,吴 婷,黄风立,宋海军
(嘉兴学院信息科学与工程学院,浙江嘉兴 314001)
0 引言
柔性电子是将有机或无机薄膜电子器件制作在柔性基板上的一种新兴电子技术,在信息、能源、健康医疗、国防等领域具有广泛的应用前景,如可穿戴设备[1]、柔性电子显示器[2]、有机发光二极管[3]、薄膜晶体管[4]、射频识别[5]、太阳能电池[6]、电子皮肤[7]、柔性机器人[8]、柔性传感器[9-10]等。由于柔性电子产品具有可弯曲和延展性,能够表征人类的生命体征,柔性电子技术发展必将给产业结构和人类生活带来革命性的变化。欧美发达国家针对柔性电子技术制定了重大研究计划,如美国FDCASU计划、日本TRADIM 计划、欧盟第七框架计划等。我国“十三五”国家战略性新兴产业发展规划明确提出将大力发展柔性电子技术。
传统的电子制造技术,如光刻、蚀刻、纳米压印、转印、激光加工技术等,在生产率、成本、材料等方面难以满足柔性电子器件的高效、低成本、批量化制造和工业化的需求,而且还面临着设备昂贵、制造成本高、周期长、可用材料少等问题[11]。这些仪器设备不仅价格昂贵,功能单一,难以适应柔性电子学新专业的实验教学体系及相应的实验内容的要求,也不利于本专业的柔性电子器件研发的综合性实践教育的开展,满足不了新增专业培养创新型人才的需要。因此,以柔性电子学新专业实践教学的实际需求为出发点,根据电流体动力打印团队在柔性电子制造技术领域的丰富经验[12-16],提出设计和研制“用于柔性电子制备的电流体动力学打印实验系统”,研制出符合柔性电子学新专业自身需求的实验教学设备,可作为实验教学、课程设计和毕业设计的实践教学和科研平台。
1 电流体动力学打印原理
电流体动力学打印技术原理如图1 所示,其工作原理:在基板和喷头之间施加一个高压电压,在高压静电场力的作用下,移动电荷在打印溶液表面聚集,电荷库仑力导致液体表面产生剪切应力,在剪切应力的作用下,打印溶液在喷嘴处形成泰勒锥,随着电场强度增加,当电场作用力大于液体表面张力时,在泰勒锥顶端会产生射流,射流直径通常为喷头直径的0.02~0.1倍,从而实现高分辨率图案打印[17]。电流体动力学打印技术由于设备简单、成本低、效率高、无需掩模、直接成形等优点,适用于绝大多数功能材料(黏度范围为1~10 000 mPa·s),是制造柔性电子器件的一种新型制造技术,在柔性电子制造方面具有巨大潜能和突出优势。
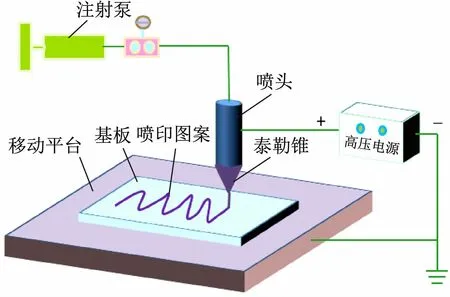
图1 电流体动力学打印原理示意图
利用电流体动力学打印技术制备柔性电子电路图案时,打印溶液在电场和流场耦合作用下数学模型的控制方程包括电动力学控制方程和电流体动力学控制方程,对于不可压缩黏性溶液的电流体动力学方程表达式可表示为[18]:
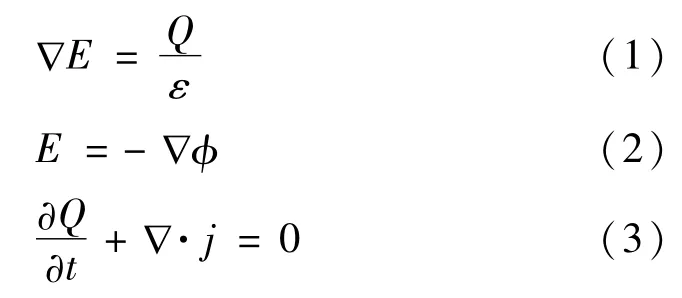
式中:E为喷头与基板之间的电场强度;Q为打印溶液的电荷体密度;ε为打印溶液的介电常数;φ为喷头与基板之间的电势;j为打印溶液的电流密度;t为时间。
针对不可压缩的黏性流体,根据流体的质量守恒定律和动量守恒定律,分别得到电流体动力学打印射流模型的连续性方程与动量方程[12]:
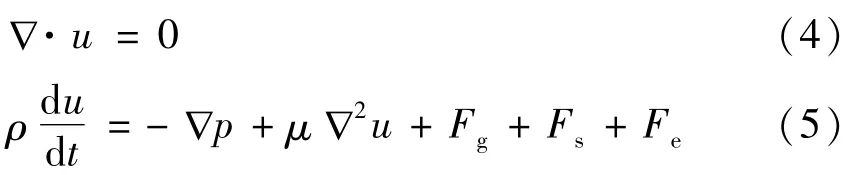
式中:u为打印溶液的速度;ρ为打印溶液的密度;p为打印溶液的压强;μ 为打印溶液的粘度;Fg为打印溶液的重力;Fs打印溶液的表面张力;Fe为电场力。
2 电流体动力学打印实验系统设计
为满足电流体动力学打印实验系统各项实验的需求,所设计的实验系统采用“工控机+功能控制器”模式的开放式系统结构,即工控机结合运动控制器、视觉监控器、流量控制器和电压控制器的结构模式。电流体动力学打印实验系统结构如图2 所示,主要由应用层、功能层和设备层等部分组成,构成了面向柔性电子制备的电流体动力学打印实验系统的3 级结构模式。

图2 电流体动力学打印实验系统结构图
2.1 应用层设计
电流体动力学打印实验系统应用层包括运动控制、视觉监控、打印模式和电压控制4 个模块。应用层的各模块功能集成在实验教学界面系统中,并在工控机上实现,主要有人机交互、运动距离和打印图案的指令发送、打印过程视觉监控、打印模式选择、高压电源电压的设定以及实时显示打印状态等功能。工控机采用控端的工控机,应用层开发采用Visual Studio 2012开发工具的VC ++编译环境,所开发的电流体动力学打印实验教学界面系统如图3 所示。

图3 电流体动力学打印实验教学界面系统设计图
运动控制模块主要实现电流体动力学打印实验教学运动平台的位置控制,控制模式主要有连续移动、手动移动和XYZ轴回零3 种控制模式;连续移动控制模式可实现X、Y和Z轴从当前位置向正方向或负方向的连续运动;手动移动控制模式可实现X、Y和Z轴增量位置或绝对位置的指定距离的运动;XYZ轴回零控制模式可先后实现Z、X和Y轴回到零点位置的运动模式。视觉监控模块主要实现打印过程监控和相机光源亮度调控。通过水平方向安装的工业相机实现电流体动力学打印过程的泰勒锥形态观测,通过切换垂直方向安装的工业相机实现电流体动力学打印图案的形貌观测;相机光源亮度调控可以实现相机光源的打开、关闭和亮度的调节。打印模式模块包括测试打印、数据打印、图形打印、位图打印、参数优化和激光烧结等功能。测试打印模式主要实现水平平行线、竖直平行线和网格线等图案的打印;数据打印模式实现数据文件的图案打印;图形打印模式实现dxf 图形文件的图案打印;位图打印模式实现jpg 格式图像文件的图案打印;参数优化功能模块采用少量试验样本数据的多变量灰色调控方法实现施加电压、喷射高度、平台移动速度和注射泵流量等工艺参数优化;激光烧结功能模块是为了提高打印图案的导电率对打印图案进行在线烧结。电压控制模块对高压电源的电压进行设置和复位以及实时显示高压电源的电压和电流。
2.2 功能层设计
电流体动力学打印实验系统功能层包括运动控制功能、视觉监控功能、流量控制功能和电源控制功能4个功能模块组成。
运动控制功能由Turbo Ethernet Ultralite型可编程多轴运动控制器(Programmable Multi-Axes Controller,PMAC)实现。运动控制功能实现过程如图4 所示,应用层的打印模式模块或运动控制模块通过应用程序接口调用PComm32 库函数将打印图案或移动距离发送给多轴运动控制器,多轴运动控制器根据柔性加减速控制模型对接收的打印图案或移动距离进行速度规划,计算出每个插补周期的速度,经过插补计算,得到每个轴的插补数据,并将插补数据信息分别发送到X/Y/Z轴的驱动器。

图4 运动控制功能设计图
视觉监控功能采用Basler的机器视觉系统实现对电流体动力学打印过程的泰勒锥形态和打印图案形貌的实时监控,Basler机器视觉软件系统对采集的视觉信息进行处理,应用层的视觉监控模块采用基于以太网模式的GigE Vision 机器视觉标准接口与机器视觉硬件系统连接,通过调用Pylon 驱动程序将机器视觉软件系统处理的图像信息显示在电流体动力学打印实验教学界面系统上。流量控制功能采用保定兰格的微量注射泵的控制器,控制器和执行单元为分体结构,采用机械装置推动注射器完成打印溶液的输送,通过485 通信总线可与工控机相连,并对其进行控制。电源控制功能通过高压直流电源产生很强的负高压,将它的一端接入阴极,另一端接入阳极,然后让阴极和阳极之间产生强烈的电场,应用层的电压控制模块通过RS-232 串口通信总线与高压直流电源的控制器相连,实现电压数据的传输与通信。
2.3 设备层设计
构成电流体动力学打印实验系统的设备组件如图5 所示,主要由注射系统、X/Y/Z轴直线模组、高压电源和机器视觉硬件系统等组件组成。注射系统采用分体式实验室注射泵(保定兰格,TJ-2A),主要由注射器、执行单元和控制器三部分组成。X/Y直线模组主要由直线电动机(HIWIN LMCB6)、驱动器(HIWIN D1)、光栅尺(Renishaw 分辨率0.1 μm)和直线导轨(HIWIN EGR20P)组成;Z轴直线模组主要由交流伺服电动机(HIWIN 400W 抱闸电动机)、驱动器(HIWIN)、光栅尺(Renishaw分辨率0.1 μm)、滚珠丝杠(HIWIN R16-05/C4)和直线导轨(HIWIN EG系列)组成。高压电源采用高压直流电源(天津东文DWP303-2ACF1)。机器视觉硬件系统主要由工业相机(Basler acA1300-30gc)、镜头(MORITEX MML6-ST110和ML8-ST65S)、光源(嘉肯JK-B5050W)、光源控制器(嘉肯JK-PWT6024-2)、千兆网卡(英特尔EXPI9402PT)和网线组成。

图5 电流体动力学打印实验系统设备
3 实验测试
以质量浓度3%的聚氧化乙烯(PEO)溶液作为打印溶液,喷头与基板之间的喷射高度为3.6 mm,高压电源施加的工作电压为4 kV,注射泵流量为166.0 nL/min,电流体动力学打印泰勒锥形成过程如图6所示。

图6 电流体动力学打印泰勒锥形成过程图
以质量浓度1.5%的聚(3,4-乙烯二氧噻吩)-聚苯乙烯磺酸(PEDOT:PPS)有机导电聚合物溶液作为打印溶液,电流体动力学打印工艺参数为:高压电源施加的工作电压2.6 kV、喷头与基板之间的喷射高度0.3 mm、平台移动速度10 mm/s、注射泵流量55 nL/min的条件下,在可弯曲的相纸上分别打印蛇形线图案、回形线图案、网格线图案和二级自相似结构图案等不同形状的图案,其结果如图7 所示。

图7 电流体动力学打印不同形状的图案
以质量浓度1.5%的PEDOT:PPS 有机导电聚合物溶液作为打印溶液,采用电流体动力学打印技术,在PDMS可延展柔性基板上打印可延展柔性有机电路,当打印图案固化后,柔性有机电路的延展性约为100%,其结果如图8 所示。

图8 电流体动力学打印可延展柔性电路图
以PEDOT:PSS/石墨烯/单壁碳纳米管(PEDOT:PSS/GR/SWCNTs)混合溶液作为打印溶液,通过电流体动力学打印技术制备柔性压力压阻传感器[16]。制作过程如图9(a)所示,首先,对厚度为200 μm 的PDMS 表面进行亲水性处理,使表面具有—OH 和—COOH等亲水基团;其次,利用自主研制的电流体动力学打印实验系统设备,在预处理的PDMS 基板上打印PEDOT:PSS/GR/SWCNTs复合材料图案,制备具有蛇形图案的柔性压敏元件;在自然晾干后,在柔性压敏单元的两端分别涂上一层银浆,并在银浆中分别粘贴两个铜电极,电极固化后,两个电极分别引出导线;最后,用同样尺寸的PDMS 薄膜对压敏单元和电极进行封装。所制作的柔性压力压阻传感器实物如图9(b)所示。

图9 电流体动力学打印柔性压力压阻传感器
4 结语
针对传统柔性电子制造技术面临着设备昂贵、制造成本高、周期长、可用材料少等问题,本文采用电流体动力学打印技术,研制了一套用于柔性电子制备的电流体动力学打印实验系统,在同一台设备上可以打印多种不同材料的柔性电子电路图案和制备柔性压力压阻传感器,降低柔性电子制造成本和提高生产效率。该系统可用于多种材料的电流体动力学打印泰勒锥形成过程、各种形状柔性电子图案打印和柔性压力压阻传感器制备等实验,通过前期的学生参与的科学研究实验,促进了电流体动力学打印技术在高等教育教学领域的应用和推广,也为后续柔性电子学新专业实验教学提供了良好的借鉴。
