PSO优化神经网络算法在滚球控制系统设计中的应用
2021-02-28厦门工学院高丽贞陈俊秀
厦门工学院 高丽贞 陈俊秀
滚球控制系统是一个多变量、非线性控制系统,是球杆系统的二维扩展。本文概述了滚球系统硬件组成及数学模型,基于PSO优化神经网络算法对滚球系统PID控制器参数进行整定,并在滚球系统上验证了控制参数,说明了参数的可靠性。
自控类题目是电子设计竞赛四大类型之一。近年来,自控类题目越来越重视多学科的交叉融合,从自平衡车系统到旋转倒立摆系统,再到风力摆系统,最后滚球控制系统,都体现了新技术与传统工业技术的紧密结合。以2017年全国电子设计竞赛B题——滚球控制系统为例,要求通过设计一控制系统,在指定边长为65cm光滑的正方形内,通过控制平板的倾斜,使直径不大于2.5cm的小球能够按照指定的要求在平板上且在指定时间内完成各种动作。滚球控制系统是一个非常典型的结合视觉、运动控制和自动控制技术的系统,也是一个典型的非线性控制系统,需要对控制系统的参数整定。但通过传统的人工调整试凑法整定优化PID控制器中的比例、积分、微分三个控制参数,耗时耗力,且随着滚球系统机械结构变化,需重新整定优化三个控制参数,不能保证控制器获得最佳的性能。因此,本文针对使用改进粒子群算法对滚球体统的PID控制器中三个参数进行整定优化方法的研究,具有很重要的实际意义。
1 滚球系统简介
1.1 滚球系统组成
本系统主要由单片机控制模块、摄像头模块、LCD显示屏模块、电源模块、舵机及平板机械支架等组成。STM32作为滚球系统的控制核心,利用摄像头采集过来的数据通过黑白二值化,以此判别平板和黑色球并显示在LCD 上。摄像头对滚球准确定位,确定其坐标位置,同时记录平板规定的9个区域坐标,单片机通过返回的坐标位置结合PID算法,通过输出PWM对舵机进行角度调节,驱动舵机调节平板的偏角,使小球在平板上稳定或做相应运动,形成一闭环控制系统,从而对小球进行实时控制。系统的总体方案框图如图1所示。
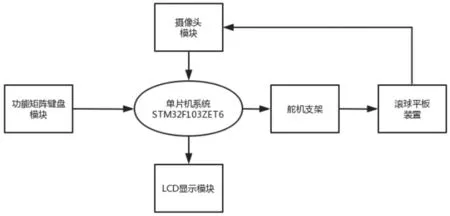
图1 系统总体方案框图
1.2 滚球系统数学模型
滚球系统通过X、Y方向各有舵机带动连杆运动,从而让小球运动。小球在X、Y方向上的运动与该方向的舵机密切相关,X方向的连杆运动如图2所示。滚球系统的输出是小球在X轴方向上和Y轴方向上的位移,输入是X轴和Y轴舵机的转角。滚球系统的数学模型参考板球系统,简化的滚球系统数学模型公式见式(1)。简化建模是在一定客观假设及理想的前提条件下所得,可得小球在X轴方向上和Y轴方向上的位移和X轴和Y轴舵机的转角成近似成线性关系。
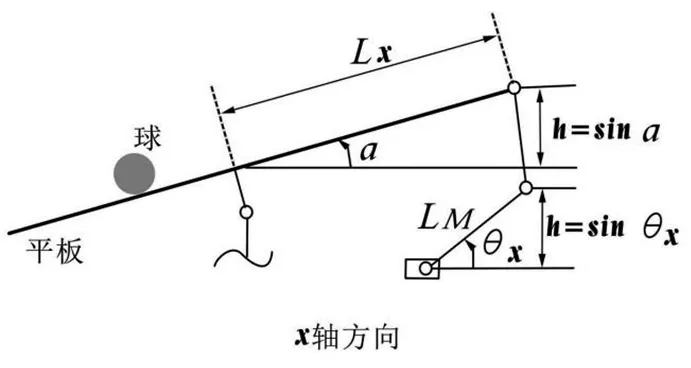
图2 X方向的连杆运动
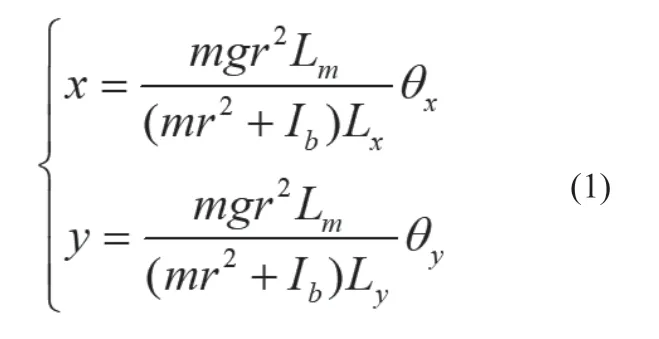
式(1)中,m为小球质量,取0.26kg;r为小球半径,取0.02m;Ib为小球的转动惯量,取0.0000416kg.m2;Lx为平板X方向上的半长,取0.65/2 m;Ly为平板Y方向上的半长,取0.65/2 m;x为小球在X轴方向上的位移,y为小球在Y轴方向上的位移。Lm为舵机力臂长度。
2 改进粒子群算法对滚球系统控制器的参数整定
2.1 PID控制器
所要求设计的滚球系统,当滚球到达指定位置后需能保持相对稳定状态。而滚球系统本身具有不稳定的系统特性,因此需加控制器将滚球系统设计成一闭环系统。本文采用PID控制器,系统设定输入的小球位置和摄像头的实际小球位置的偏差信号经过控制器处理,转化成为角度信息传递给被控对象。通过整定PID控制器的比例、积分、微分三个控制参数使滚球系统达到稳定。
2.2 PSO算法优化BP神经网络
粒子群算法(PSO算法)是计算机智能控制领域的一种基于群体协作的全局随机搜索寻优算法。其中的每个粒子都代表了一个潜在的解,粒子的好坏由一个事先设定的适应度函数来确定。通过粒子间的协作与竞争,粒子群算法实现了对复杂空间中最优解的搜索。但因粒子群算法函数寻优过程中存在易陷入局部最优解的问题,在粒子群算法中引入了神经网络,提高了算法的寻优收敛精度和效率。
PSO对神经网络进行优化训练的流程图如图3所示。将神经网络中需要训练的参数(PID控制器为比例、积分、微分三个控制参数)算作PSO算法中的一个粒子集,粒子集的数量是神经网络中需要训练的参数个数。首先对这些粒子的位置与速度进行随机初始化,然后根据实际输出与期望输出间的误差计算适应度,并重新迭代求解每个粒子的全局最优位置与当前速度,即得到了更新后的网络权值。随后代入新的权值参数再重新训练,以此迭代下去,直到适应度收敛到一定阈值范围内,停止算法。
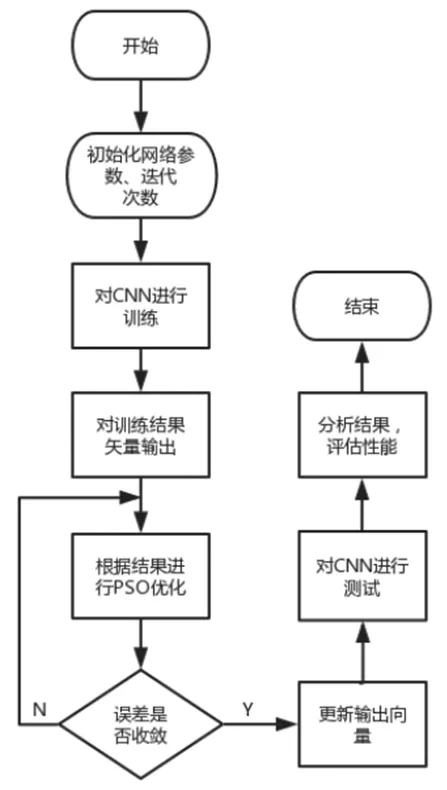
图3 PSO对神经网络进行优化训练的流程图
2.3 参数整定过程
PID参数整定过程原理示意图如图4所示。所求的最优解是PID控制器比例、积分、微分三个参数的系数。
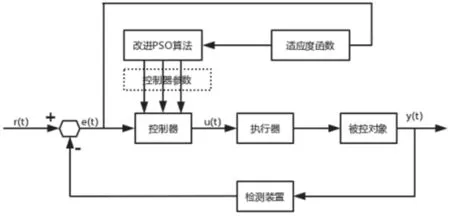
图4 参数整定优化原理图
将通过参数整定优化得到的PID控制器应用到实际滚球系统实验台上,系统的阶跃响应具有较快的响应速度,不到1s系统即可达到稳态,具有较小的振荡。
结论:本文完成了滚球系统的硬件搭建,且针对PID算法不容易调节的问题,提出PSO算法优化BP神经网络,通过分析系统的控制效果,验证所求得的控制器参数在实际滚球系统控制器上的鲁棒性。
