四足机器人trot 步态联合仿真分析
2021-02-27吴浔炜左鹏
吴浔炜,左鹏
(200093 上海市 上海理工大学 机械工程学院)
0 引言
在众多应用场景中,尽管轮式、履带式机器人满足了人们的诸多需求,但是轮式及履带式的结构也决定了其在非结构化路面等复杂环境下的运动能力欠缺。相比之下,足式机器人由于能够选择离散的落足点而使得其在复杂路面下的通过能力远高于轮式机器人,其中四足机器人具有更好的综合性能[1]。
本文设计一个四足机器人,利用SolidWorks建立四足机器人的简化模型,在ADAMS 中建立虚拟样机,设置环境模拟量模拟四足机器人在现实环境中的运动和状态,利用MATLAB 和ADAMS 联合仿真的方法对四足机器人进行运动仿真,根据仿真结果对设计方案进行优化,提高机器人结构的合理性。与其他步态相比,trot 步态具有较宽的速度变化,并且可在支撑相和摆动相之间平滑切换。行走时有较好的对称性,有效地消除了机器人躯干的不平衡力矩[2-3]。本文利用trot 步态进行四足机器人仿真。
1 四足机器人结构
在ADAMS 软件中难以实现复杂结构的建立,所以在SolidWorks 中建立三维模型,通过中间格式将三维模型导入ADAMS 中进行仿真。四足机器人采用仿四足动物的身体结构形式,四足机器人由机身以及4 条腿组成。
腿机构的可控自由度越多,机器人的灵活性就越好,但每一个可控自由度要配备一套驱动系统和一套传动机构,所以每增加一个自由度,其质量相应要增加许多,因此步行机器人腿机构的自由度在满足运动条件前提下越少越好。这里选定每条腿有3 个空间自由度,即机器人每条腿具有3 个关节,分别为侧摆关节、髋关节和膝关节。关节配置形式采用全肘式。全肘式的关节配置更利于在复杂的地面上行走,具有很好的稳定性[4]。根据以上分析,建立四足机器人结构三维图,如图1 所示。
在相同的关节输出力矩的情况下,腿的质量/转动惯量越小,则被控响应速度越快。另一方面,机器人在从高处下落这种情况时,腿着地瞬间,关节速度瞬间突变。如机器人腿的转动惯量过大,将会给腿连杆产生较大的冲击力矩,而损坏腿或足。尤其是如果采用较高减速比的减速器来驱动关节,那么电机转子本身的转动惯量等效到腿关节上后将会很大,使得在关节速度突变这种情况下,很容易损坏减速器。
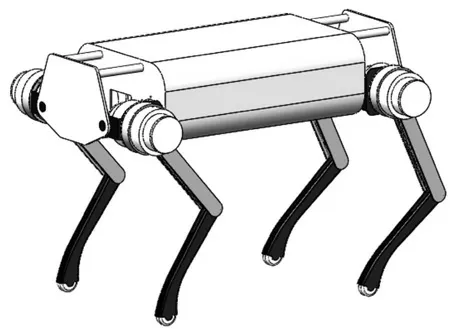
图1 四足器人三维模型Fig.1 3D model of quadruped robot
为了有效减小机器人腿的质量,一般通过传动机构将膝关节的电机挪至髋关节处。如图2 所示,本文结构将膝关节电机移至髋关节,并通过链传动驱动膝关节运动。
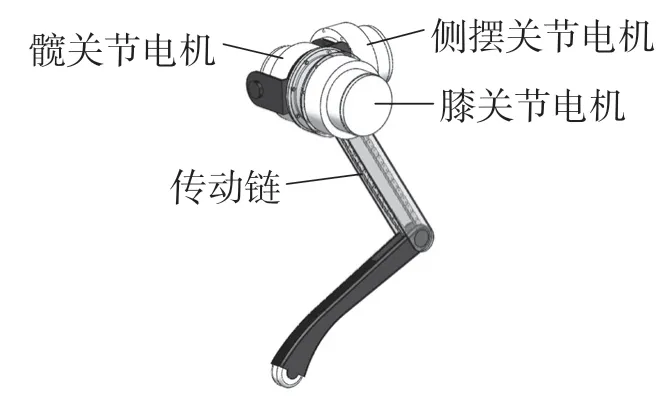
图2 左前腿三维模型Fig.2 3D model of left front leg
2 单腿运动学建模
2.1 运动学正解
运动学模型是对四足机器人运动控制以及分析的基础。图3 所示机构参数为:L1为髋部长度,即横摆中心到大腿旋转中心的距离;L2为大腿长度;L3小腿长度;θ1为侧摆转角;θ2为髋关节转角;θ3为膝关节转角。
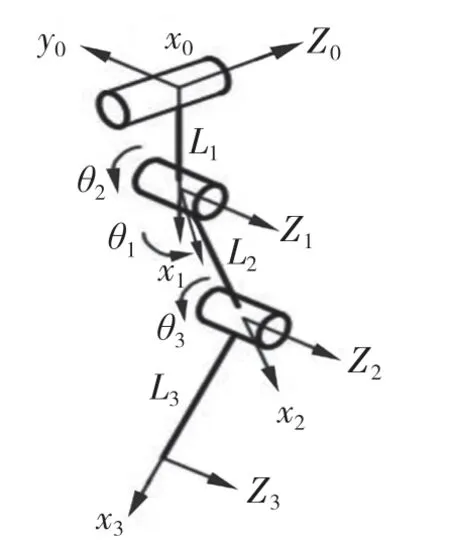
图3 单腿D-H 坐标图Fig.3 D-H coordinate diagram of single leg
在横摆中心处建立基坐标系,利用D-H 坐标表示法建立足端坐标系在基坐标系下的坐标,见表1。
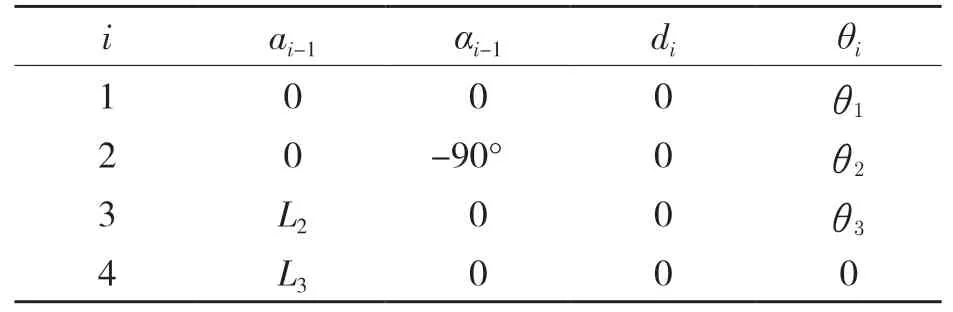
表1 单腿D-H 坐标参数Tab.1 D-H coordinate parameters of single leg
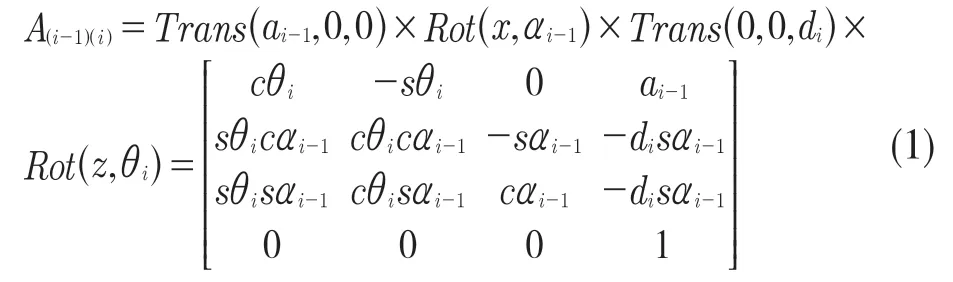
连杆变换通式:
将表1 数据带入式(1)的连杆间可得变换矩阵为
足端位姿相对于基坐标系,可得变换矩阵为
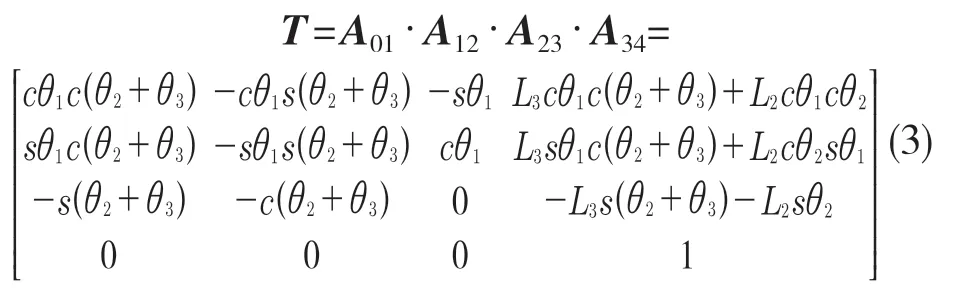
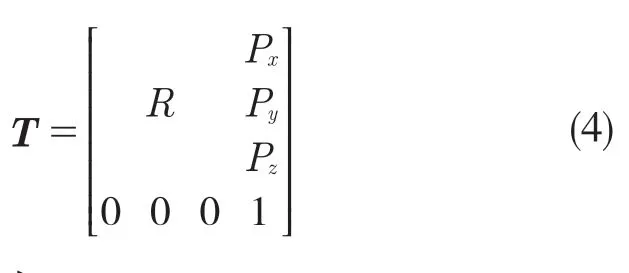
若只考虑足端位置,不考虑姿态,则足端位姿相对于基坐标系的变换矩阵为
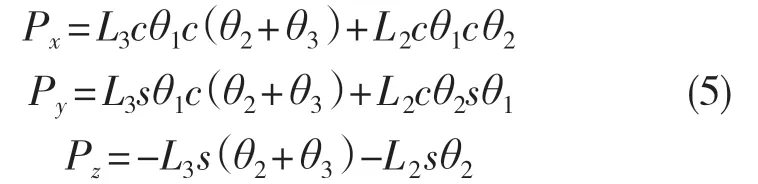
则单腿正解为
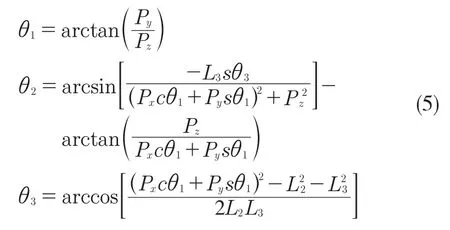
2.2 运动学逆解
对四足机器人正运动学方程进行反解可得出逆运动学方程,即根据足端坐标求出关节角度。
3 ADAMS 建模与联合仿真
3.1 ADAMS 建模及输入输出变量设置
在ADAMS 中进行四足机器人动力学仿真,需要将SolidWorks 的三维图以x_t 格式保存,然后导入到ADAMS 中,如图4 所示。在ADAMS 中,定义各个部件之间的约束关系。机器人总自由度数为12 个,故在每个关节都添加一个转动副,并且在转动副上添加旋转驱动作为输入。四足机器人与环境的作用关系仅通过足端与地面的相互作用实现,故在足端与地面之间应设置接触力,具体接触力参数设置如图5 所示。
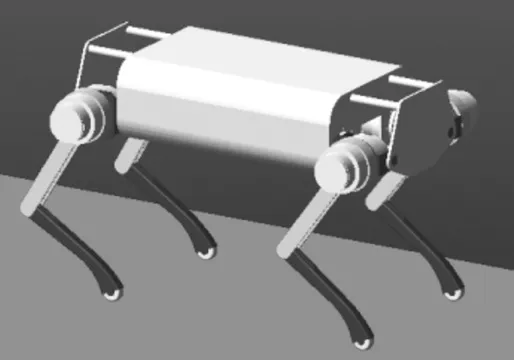
图4 机器人虚拟样机模型Fig.4 Robot virtual prototype model
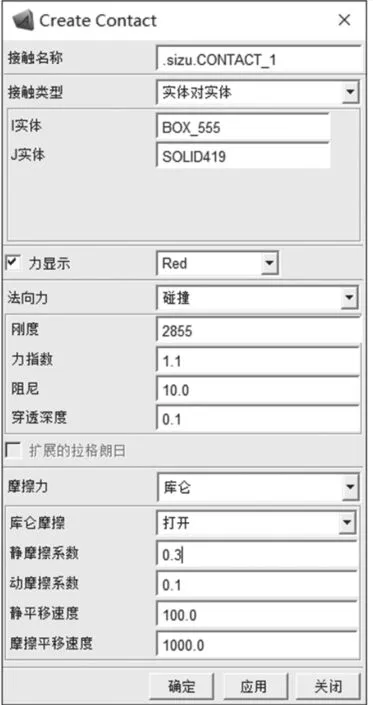
图5 接触力参数设置Fig.5 Contact force parameter setting
本文设计的四足机器人采用电机驱动关节的形式,故输入为各条腿的3 个关节驱动,总共12 个驱动。输出为机体质心在3 个方向上的位移,以及左前腿髋关节和膝关节的扭矩。利用Element 建立系统输入输出变量,定义LF1、LF2、LF3、LB1、LB2、LB3、RF1、RF2、RF3、RB1、RB2 和RB3 为各个关节的输入变量,利用VARVAL 函数作为驱动的输入。定义DX,DY,DZ,pitch,roll,yaw,Torque1 和Torque2作为输出变量,其中DX,DY,DZ 分别为质心在竖直方向、横向和前进方向这3 个方向上的位移量;pitch,roll,yaw 分别为机体的俯仰角、横滚角、偏航角;Torque1 和Torque2 为左前腿髋关节和膝关节的扭矩。将虚拟模型的机械系统导出,如图6 所示。
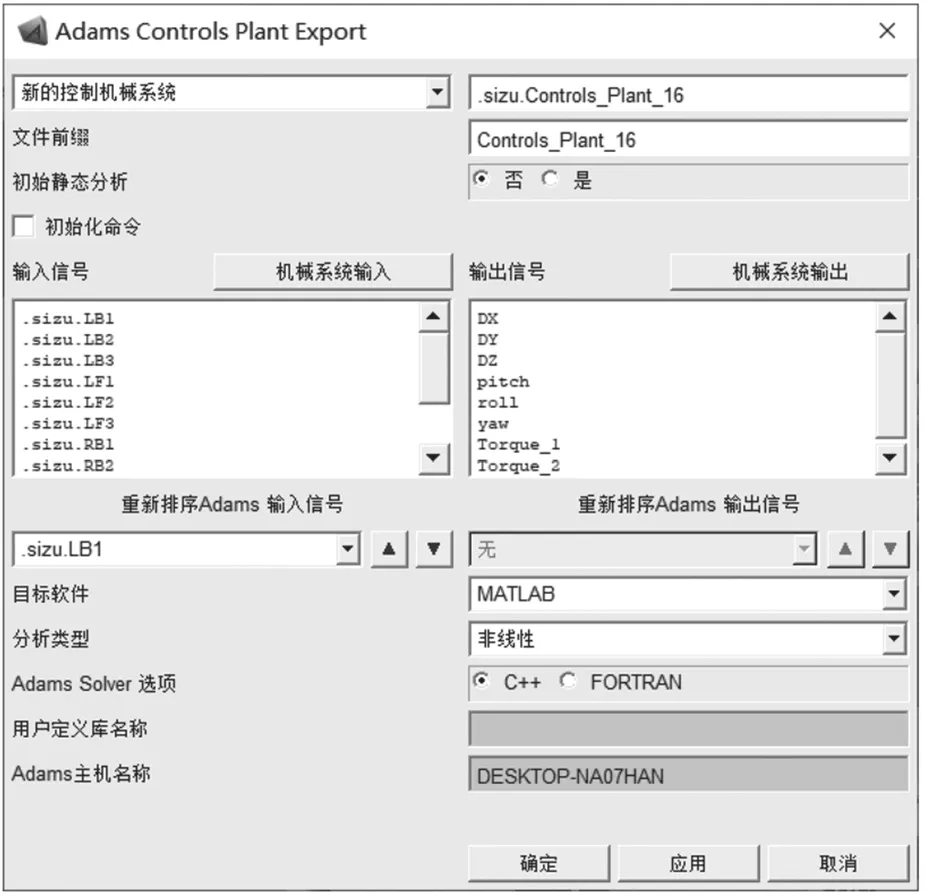
图6 输入输出设置窗口Fig.6 Input and output settings window
3.2 联合仿真平台搭建
为实现四足机器人稳定行走,需要实时地对四足机器人状态进行分析和控制。ADAMS 和MATLAB 的联合仿真可实现这一过程。整个过程中ADAMS 中虚拟样机作为被控制对象,需要从MATLAB 中获得驱动数据,即MATLAB 的输出为ADAMS 的输入。MATLAB 则需要虚拟样机的实现状态来调整控制程序,即ADAMS 中虚拟样机的状态输出为MATLAB 的输入。图7 是从ADAMS 中导出的机械系统,其输入输出在上文中进行了说明。图8 为四足机器人的整个控制程序,将每条腿的控制程序作为子系统进行封装,每条腿的3 个输出作为机器人机械系统的输入。
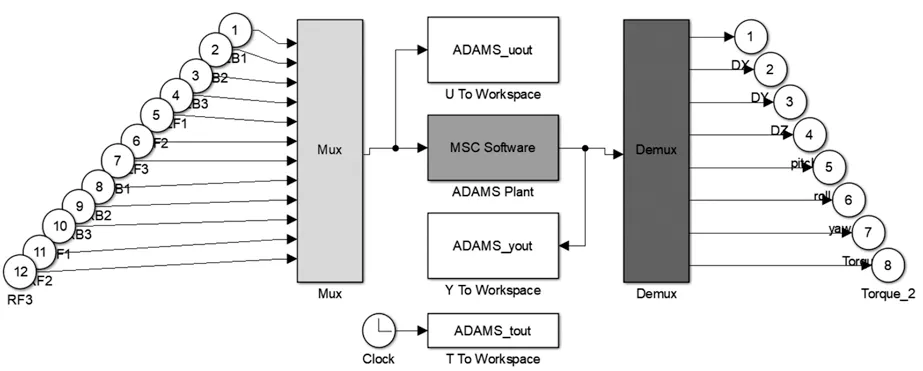
图7 ADAMS 机械系统Fig.7 ADAMS mechanical system
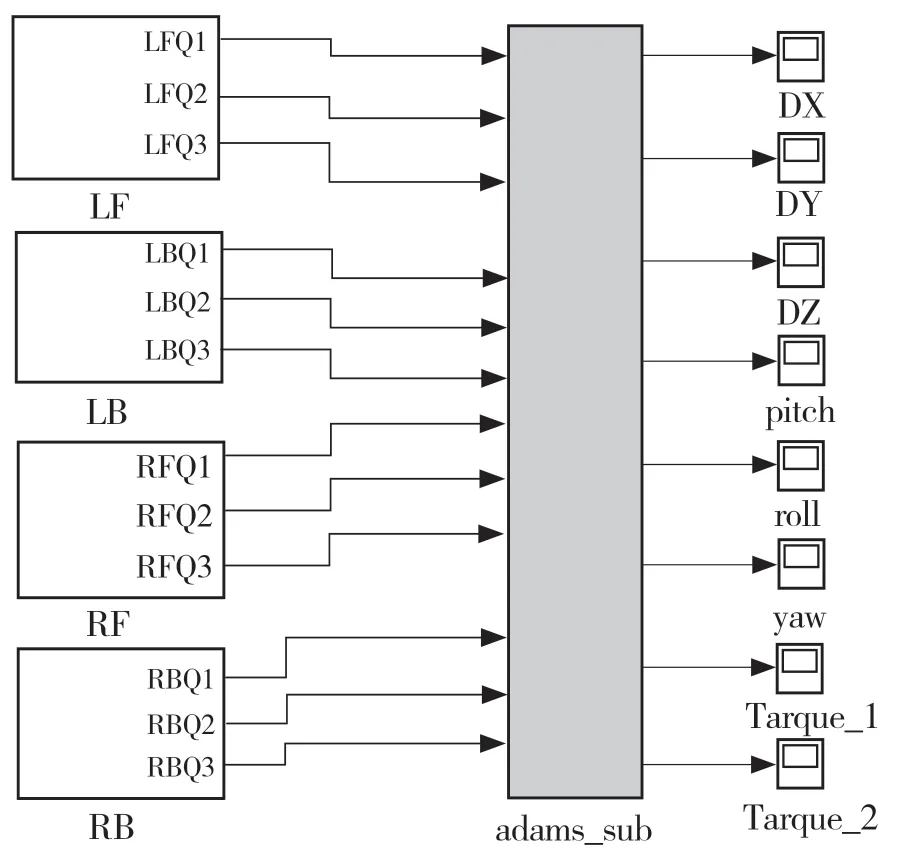
图8 Simulink 控制系统Fig.8 Simulink control system
4 仿真分析
仿真过程共持续6 s。为获得更好的运动效果,本文采用五次多项式轨迹进行足端轨迹规划,并在机器人行走前对4 条腿的初始位置进行调整,使得在行走过程中,重心相对于支撑脚连线的运动尽量保证前后对称,提高行走过程中机身稳定。仿真运行时,可以在MATLAB 中观察并输出仿真结果曲线,也可以在仿真结束后进入ADAMS 的后处理模块观察仿真结果。
机器人质心在X、Y、Z 三个方向的位移曲线分别如图9—图11 所示。X 方向为竖直方向,机器人质心在X 方向上的波动幅度为7 mm,机身质心离地高度为500 mm,则机器人质心竖直方向上的波动率为1.4%,运动较为平稳;Y 方向为机器人横向方向,机器人质心的横向波动幅度为22 mm,波动幅度较小;Z 方向为机器人的前进方向。从位移曲线可见,机器人在第1 s 内前进方向没有移动,而竖直方向和横向有轻微移动,这是因为在步态规划中,前1 s 时间用于调整4 个足端的初始位置,所以会造成机身轻微的摆动。Z 方向位移曲线比较平滑,斜率基本保持不变,说明整个运动过程中机器人都能稳定行走。
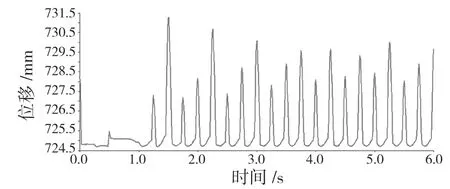
图9 质心在X 方向的位移Fig.9 Displacement of the center of mass in X direction
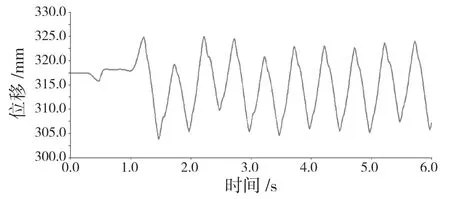
图10 质心在Y 方向上的位移Fig.10 Displacement of the center of mass in Y direction
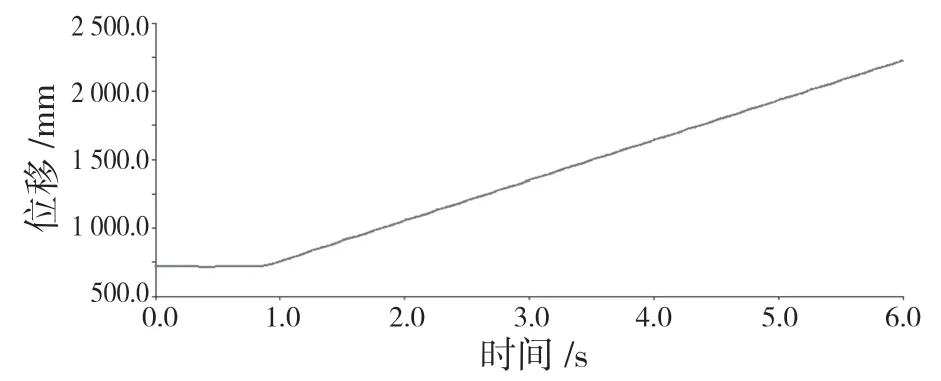
图11 质心在Z 方向上的位移Fig.11 Displacement of the center of mass in Z direction
如图12—图14 分别为机器人在俯仰角、偏航角、横滚角的变化曲线。机器人在整个仿真过程中,俯仰角变化幅度为1.26°,横滚角变化幅度为2.46°,偏航角变化幅度为0.9°,3 个角度变化都比较小,说明在仿真过程中机器人机身摆动幅度较小并且保持在一个平稳状态。
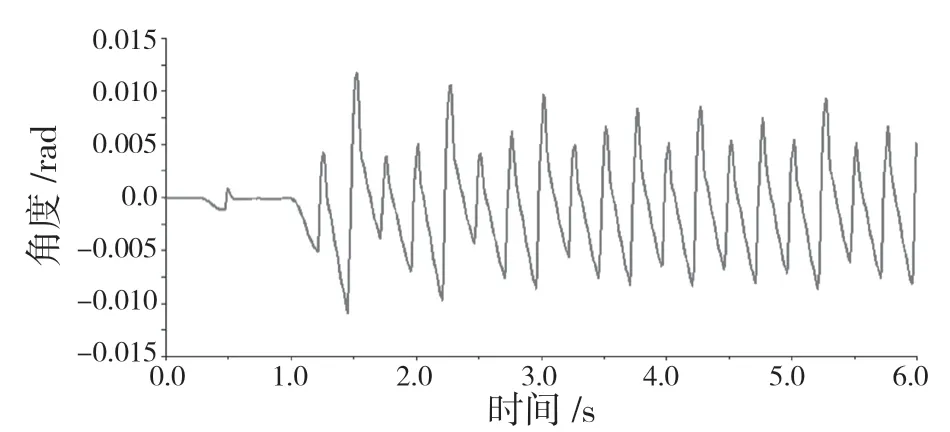
图12 机器人俯仰角变化曲线Fig.12 Curve of robot pitch angle change
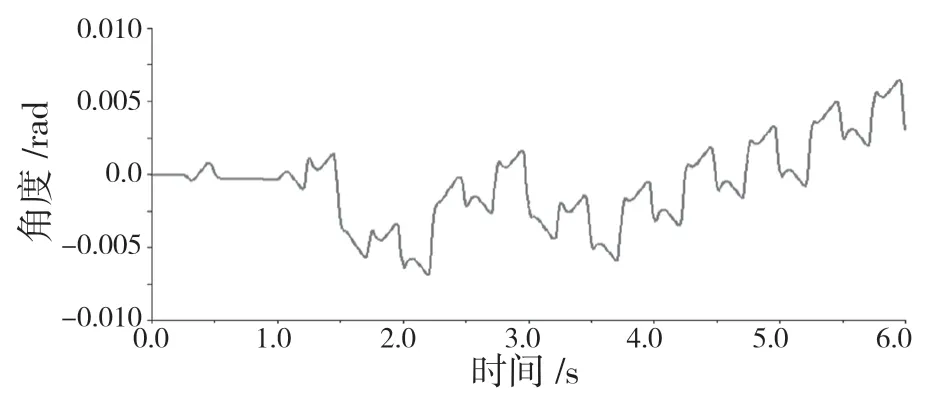
图13 机器人偏航角变化曲线Fig.13 Curve of robot yaw angle change
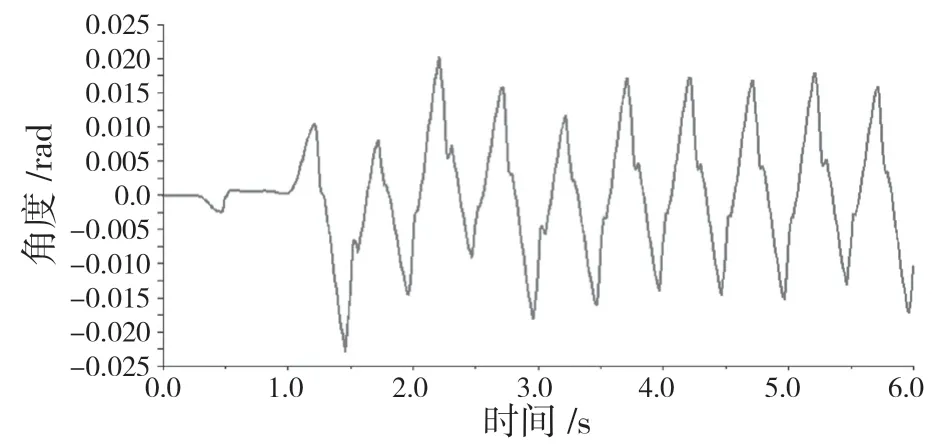
图14 机器人横滚角变化曲线Fig.14 Curve of robot roll angle change
从机器人偏航角的变化曲线可以看出,虽然在整个仿真的6 s 内,偏航角的变化幅度只有0.9°,但是随着时间的推移,偏航角在不断变大,这是每一个周期的偏航角偏差的叠加造成的。本文涉及到四足机器人姿态控制的内容,所以会产生这样的现象,如果加上对机器人姿态的控制,可以将机器人的偏航角控制在一定范围内。
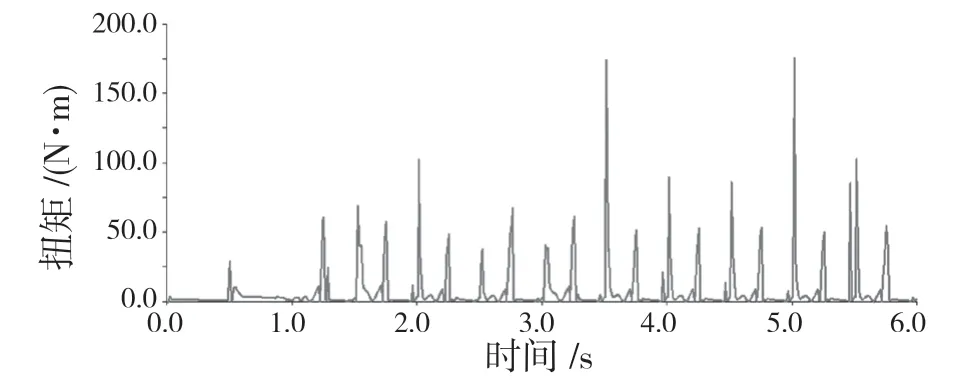
图15 髋关节扭矩Fig.15 Torque of hip joint
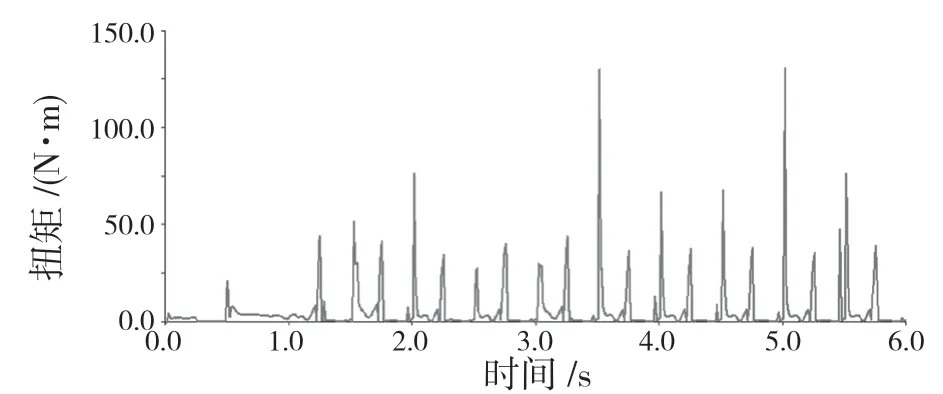
图16 膝关节扭矩Fig.16 Torque of knee joint
图15、图16 所示为左前腿髋关节和膝关节的扭矩曲线。从图中看到,关节扭矩有较大的波动,这是由足端与地面接触时产生的较大冲击导致的,如果在行走的基础上加上腿部柔顺性控制,可以很好地改善这种现象。从曲线中可以得到四足机器人左前腿髋关节最大扭矩为175 N·m,有效扭矩为45 N·m;左前腿膝关节最大扭矩为124.37 N·m,有效扭矩为 35 N·m。根据各关节的最大扭矩可以确定所用电机的转矩,从而选择电机的型号。
5 结语
本文设计了一款四足机器人结构,采用SolidWorks 建立机器人三维模型,并通过ADAMS、MATLAB 联合仿真对四足机器人进行动力学仿真。分析机器人质心在不同方向上位移及机身姿态角的变化,可以看出机器人在整个运动过程中能实现稳定行走,验证了该结构的可行性。同时得到机器人腿部关节的扭矩,为后续的物理样机的研制提供了参考。通过此方法,可以方便地进行参数优化和性能预测,提早发现设计问题,大大提高设计效率,节省时间和经费。
虽然在整个仿真中机器人能实现稳定行走,但仍有不足之处,如:机器人的偏航角会随着时间的推移越来越大;关节扭矩在足端触地时会出现较大冲击。这些问题都需要在后续的研究中改善相应的控制程序来解决。
