轮毂电机驱动电动汽车的四轮转向操纵稳定性分析
2021-02-27李安
李安
(255049 山东省 淄博市 山东理工大学 交通与车辆工程学院)
0 引言
随着经济的快速发展,全国交通变得越来越便利,环境污染也越来越严重。由于车辆带来的环境污染问题占据着很大比重,因此为了缓解环境污染问题,更多种类、更加节能的电动汽车逐渐发展起来,并且在电动车市场中起着越来越重要的作用。轮毂驱动电动汽车作为电动汽车的一种理想结构形式,逐渐走进人们的生活之中。
轮毂驱动电动汽车相比于传统电动汽车,其驱动电机放置在轮毂内,增加了汽车底盘的布置空间,省略了传统电动汽车固有的机械传动机构,减轻了整车质量,实现了电动汽车轻量化,提高了传动效率。但是目前针对轮毂电机驱动电动汽车的研究多停留在前轮转向上,前轮转向结构已经不能满足人们对车辆行驶性能的要求。因此,为了响应保护环境、节约资源的主题,提高轮毂驱动电动汽车的机动灵活性,减小转弯半径,适应越来越拥挤的交通环境,本文针对轮毂驱动电动汽车的底盘结构,建立了轮毂驱动电动汽车的四轮转向底盘模型,并结合模糊控制对轮毂驱动电动汽车的四轮转向结构进行操稳性分析。
1 车辆模型的建立
1.1 动力学模型建立
整车动力学模型主要是将整车的复杂结构通过CATIA 中所建立的三维模型转换导入ADAMS中。为实现车辆的运动,需将驱动施加在运动副,需要对车轮和制动之间、转向球头和转向节之间以及吊耳和车架之间施加转动副,对转向拉杆和转向器施加移动副,对转向拉杆和转向球头之间施加球副,对其余不考虑其运动时产生影响的部件施加固定副固定在车架上,建立如图1 中所示的车辆动力学模型。
图1 整车动力学模型Fig.1 Vehicle dynamics model
2 模糊控制策略的建立
2.1 模型假设
针对建立的车辆模型,对所要建立二自由度车辆理想模型做出如下假设[1-3]:
(1)忽略转向系统带来的影响,不考虑方向盘的作用,直接以车轮的转角作为信号的输入;
(2)忽略悬架带来的影响,不考虑车辆的俯仰,只考虑车身绕z 轴且平行于地面的运动;
(3)汽车等速前进,保持车辆前进车速u大小不变;
(4)不考虑轮胎的回正力矩影响;
(5)汽车被认为是左右对称,且不考虑轮胎载荷变化带来的影响。
2.2 模型推导过程
根据上述假设,将整车模型简化为一个两轮摩托车模型,如图2 所示。该模型是一个仅包含横摆和侧倾两个自由度的车辆模型,并根据这个两轮摩托车的二自由度模型,建立微分运动方程[4]。
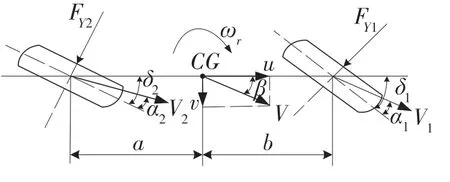
图2 四轮转向二自由度车辆模型Fig.2 Four-wheel steering two-degree of freedom vehicle model
根据图2 所示二自由度车辆模型的受力分析,以牛顿第二定律和牛顿矢量力学体系为理论基础,对所建立的二自由度模型进行受力分析,得到如式(1)所示的数学方程,推导过程如下:

式中:FY1、FY2——前后车轮相对于地面产生的反作用力;δ ——车轮的转动角度,其角度很小。因此,近似看成cosδ1≈1、cosδ2≈1。舍弃上述近似值,式(1)可表示为

故,二自由度车辆运动微分方程为
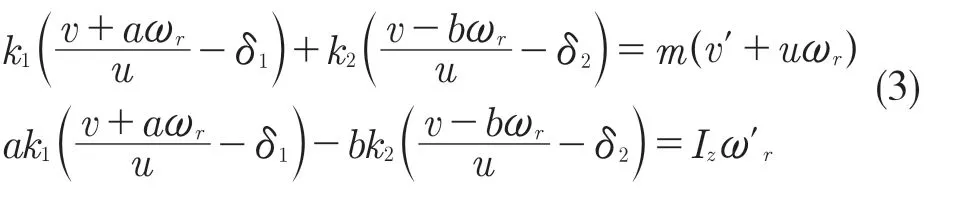
式中:v——质心速度沿y 轴产生的分量;a——车辆的质心到前轴的距离;b——车辆的质心到后轴的距离;ωr——车辆在质心处的横摆角速度;ωr'——车辆在质心处的横摆角加速度;IZ——车量的转动惯量;k1,k2——车轮的前、后侧偏刚度之和;u——质心速度沿x 轴的分量;α1,α2——车轮侧偏角;β——整车在质心处的侧偏角。
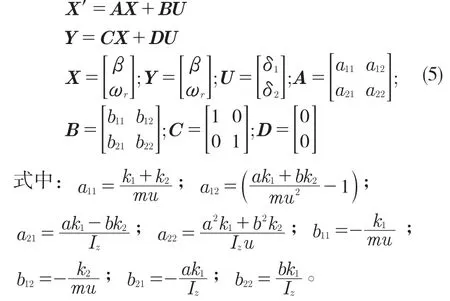
根据二自由度车辆微分方程将式(3)变形为标准空间方程:

式(4)可变形为状态方程:
2.3 模糊控制器的建立
车辆的操纵稳定性能主要通过质心侧偏角和横摆角速度来进行检测对比,因此本文以横摆角速度和质心侧偏角的误差值为控制目标,建立模糊控制策略。
按照所设计的实际变量的变化区间定义模糊控制的基本论域,结合所需要的结果的精确性以及前人所总结出的控制规则经验,将模糊控制量定义为{NB NM NS Z PS PM PB}这7 个控制量所组成的模糊集合来表示模糊输入。
针对每个输入和输出定义语言变量,横摆角速度误差值E1、质心侧偏角误差值E2 以及后轮转角变化值U。根据实际输入和输出变量的论域,对论域值进行尺度变换,其变换原理就是将语言变量定义为离散论域。例如在实际中产生的误差的范围为e=[eL,eH],其中eL表示范围内的最小值,eH表示范围内的最大值,则可以根据式(6)进行论域转换:

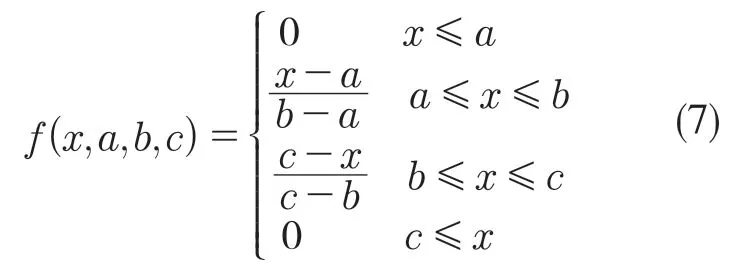
可以将论域重新定义为有限整数离散论域,这里将E1 的范围定为[-8,8]之间。同样,将E2 的定义在[-10,10]之间,U 的范围定义在[-1,1]之间。
确定隶属度函数。隶属度函数形状越尖分辨率较高,此时的输入变换会使得输出变换较为灵敏;反之,隶属度函数越平缓,相对应的输入输出的变换灵敏度越差,但是这种越平缓的隶属度函数对应的系统就越稳定。因此通常在输入比较大的区间内采用分辨率较低的隶属度函数,输入较小的区间内采用分辨率较大的隶属度函数,并且保证整个隶属度函数的分布要覆盖在整个论域之内,不能出现空挡区[5]。这里输入的区域均较小,因此选择形状较为尖锐的隶属度三角型函数,其函数布置如式(7)所示:
结合实际车辆的输入值和经验值完成模糊控制中这3 个变量的隶属度函数的设计,分别如图3—图5 所示。
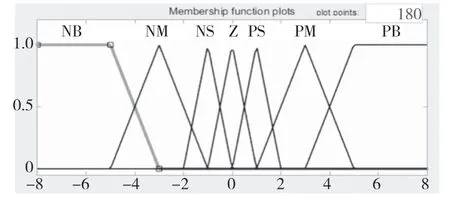
图3 模糊控制输入横摆角速度差值E1Fig.3 Yaw velocity difference E1 of fuzzy control input
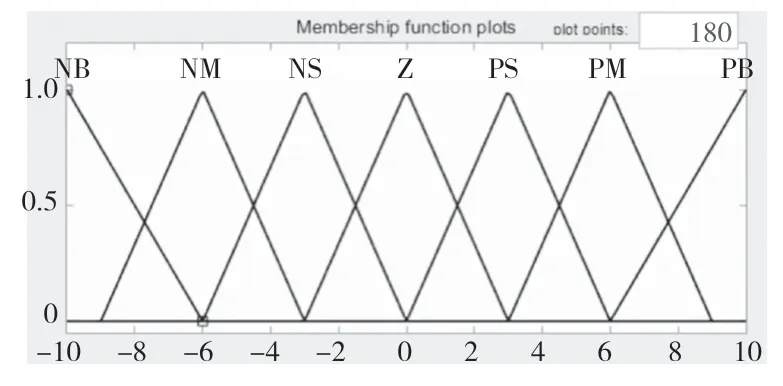
图4 模糊控制输入质心侧偏角差值E2Fig.4 Centroid deflection angle difference of fuzzy control input E2
图5 模糊控制输出后轮转角变化值UFig.5 Rear wheel angle change value U of fuzzy control output
最后,确定模糊控制规则,模糊控制规则参照前人所累积的知识以及实验经验,结合自身车辆的实际情况,对输入和输出变量表示成“If A and B,then C”。模糊控制规则表如表1 所示[6]。
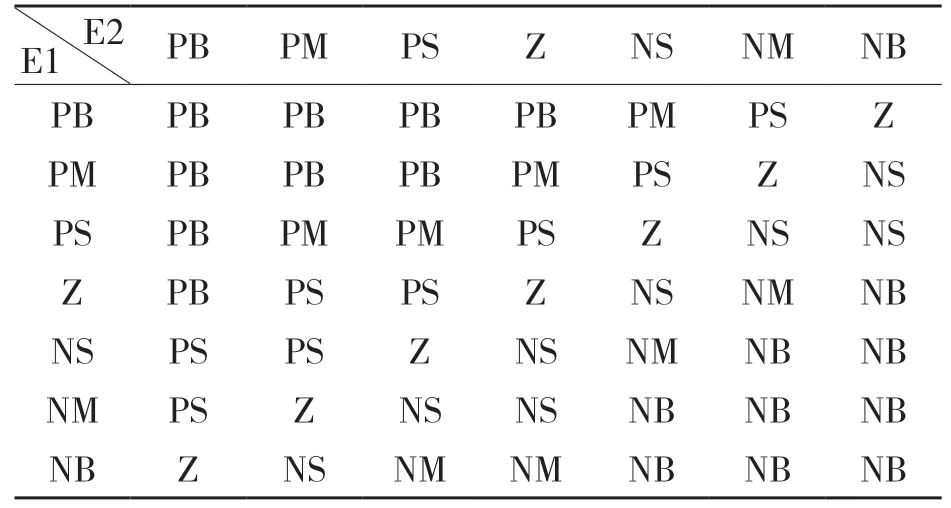
表1 模糊控制规则表Tab.1 Fuzzy control rules
根据前面所设计的输入、输出的控制变量以及建立的控制规则,以MATLAB建立模糊控制器,模糊控制器的建立如图6 所示。
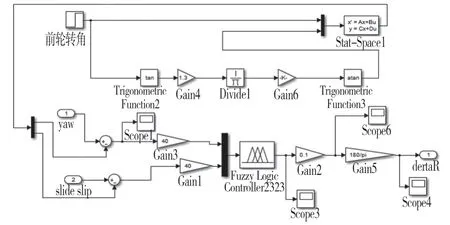
图6 模糊控制器结构Fig.6 Fuzzy controller structure
3 联合仿真分析
3.1 联合仿真设置
首先做联合仿真前的准备,将ADAMS 和MATLAB 的工作路径设置为共同的路径,这样能够快速调用所需文件,防止文件调用不到导致联合仿真出现错误。然后,根据所建立的ADAMS/View 动力学模型建立能够与MATLAB 中进行数据交换的数据单元和系统单元,联合仿真将以MATLAB 中的输出—后轮转角变化值微信号做为ADAMS 的输入信号,以ADAMS 中的输出—质心侧偏角和横摆角速度的值为信号做为MATLAB的输入信号进行数据交换,从而进行联合控制仿真。信号输入和输出如图7 和图8 所示。
3.2 联合仿真模型的搭建
根据上述所建立的ADAMS 中的输入和输出控制单元,根据ADAMS/Control 这个模块将前面所建立的整车动力学模型导出到MATLAB 中,与MATLAB 中所建立的模糊控制策略进行联合控制,在MATLAB 中打开导出的文件运行并输入ADAMS_sys 指令,以Simulink 模块打开该模型,得到如图9 中所示的ADAMS_sub 控制模块,将该控制模块打开后会得到如图10所示的结构图。
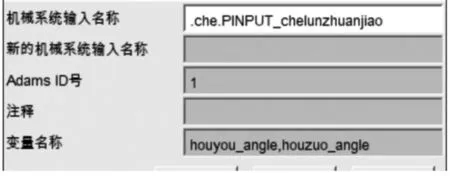
图7 机械系统输入单元Fig.7 Input unit of mechanical system
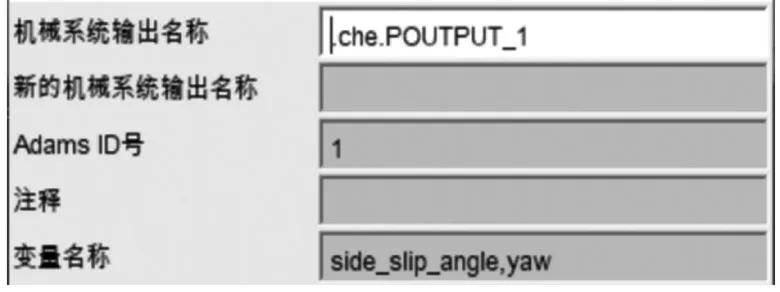
图8 机械系统输出单元Fig.8 Output unit of mechanical system
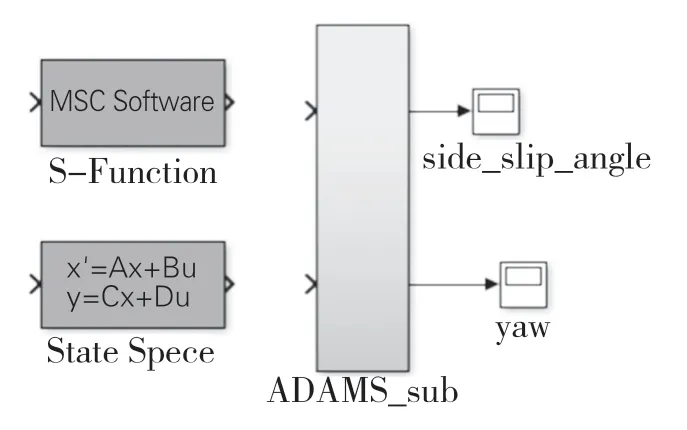
图9 ADAMS_sub 控制模块Fig.9 ADAMS_sub control module
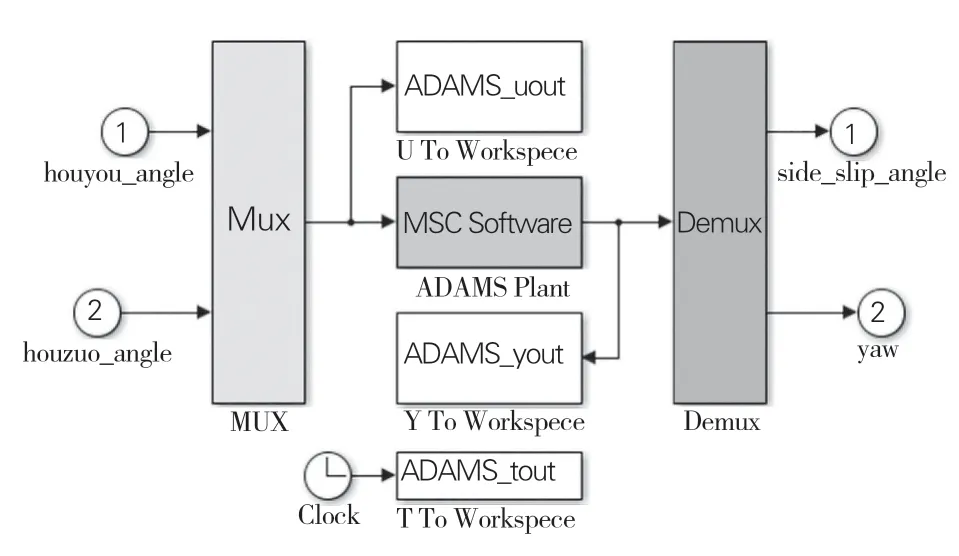
图10 ADAMS 控制模块内部结构图Fig.10 Internal structure diagram of ADAMS control module
根据建立好的模糊控制模型以及ADAMS 动力学模型,以ADAMS 动力学模型的输出做为模糊控制的输入、以模糊控制的输出做为ADAMS动力学模型的输入建立模糊控制器和ADAMS 动力学模型联合仿真,得到如图11 所示的联合仿真模型图。
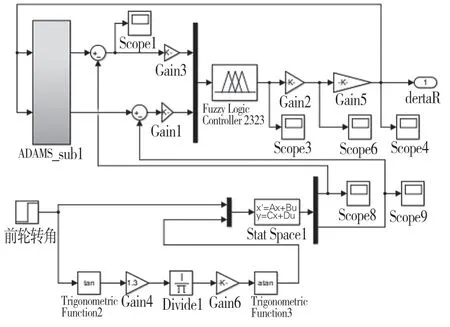
图11 基于模糊控制的联合仿真模型图Fig.11 Joint simulation model diagram based on fuzzy control
3.3 联合仿真与结果分析
为检验联合仿真的实验效果,对整车选择在不同车速的角阶跃输入转向下的运行工况进行分析。角阶跃输入转向能够很好地体现实际过程中整车转向性能,因此在该车上我们不考虑方向盘的功用,直接将给车轮施加一个角阶跃输入,使分布式轮毂电动汽车在附着率为0.7 的平坦路面上完成角阶跃输入试验和单移线试验。角阶跃输入试验为给整车分别施加一个10 km/h 和30 km/h的车速,在这两种车速下,在时间都为1 s 时施加一个前轮转角为20°的角阶跃输入转角,得到如图12 和图14 中所示的车辆横摆角速度的曲线对比图,以及图13 和图15 中所示的车辆质心侧偏角的对比曲线图。
由图12和图13已看出,在车速为10 km/h时,前轮转向的横摆角速度的稳定值在0.43(°/s)左右,而质心侧偏角的稳定值则在0.3°左右。同样情况下,四轮转向状态下的横摆角速度的值约为0.26(°/s),而质心侧偏角的值则约为0.15°。
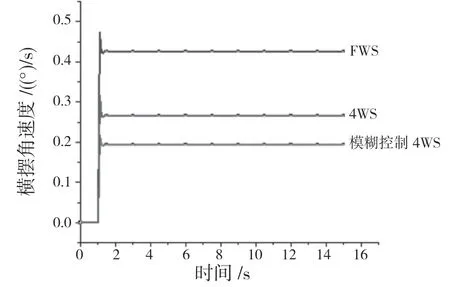
图12 10 km/h 横摆角速度Fig.12 Yaw velocity of 10 km/h
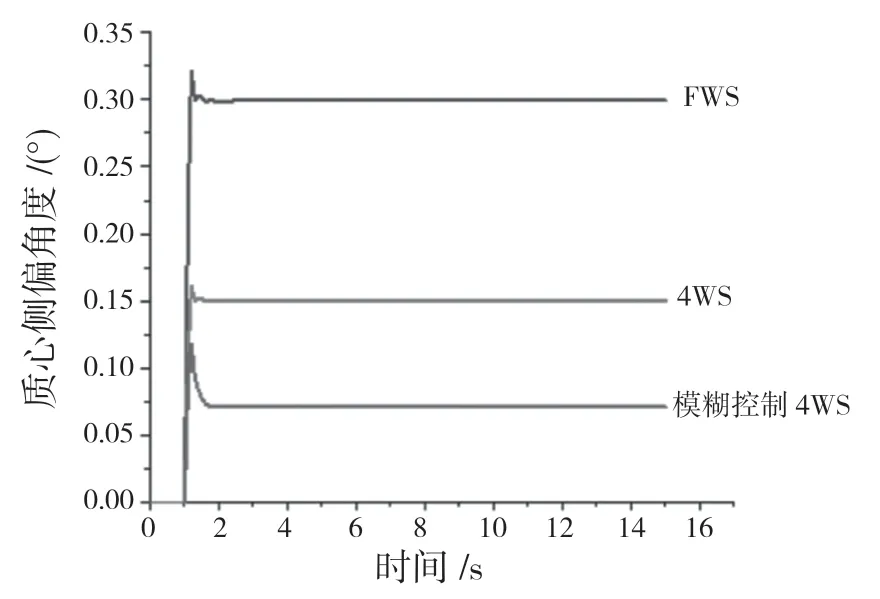
图13 10 km/h 质心侧偏角Fig.13 Centroid deflection angle of 10 km/h
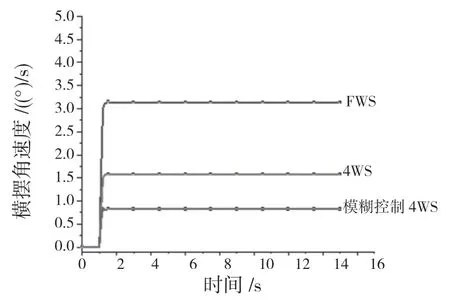
图14 30 km/h 横摆角速度Fig.14 Yaw velocity of 30 km/h
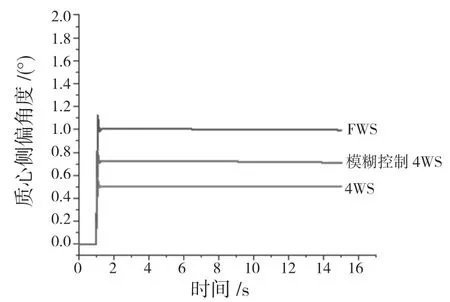
图15 30 km/h 质心侧偏角Fig.15 Centroid deflection angle of 30 km/h
在模糊控制下车辆的四轮转向的横摆角速度值在0.2(°/s)左右,在这种情况下的质心侧偏角的值则约为0.075°。所以在操纵稳定性上前轮转向的稳定性能要远低于四轮转向以及带有模糊控制下的四轮转向车辆的稳定性,而四轮转向的稳定性要小于带有模糊控制的稳定性,因此可以看出四轮转向及模糊控制均能够有效地降低车辆的横摆角速度和质心侧偏角,从而能够有效提高车辆行驶时的稳定性能。
如图14 和图15 所示,车辆在30 km/h 的车速下,在时间为1 s 时施加一个车轮转角为20°的角阶跃输入转角,其模糊控制下四轮转向的横摆角速度和质心侧偏角要远远低于没有模糊控制的四轮转向和前轮转向的值。结合图12 和图14以及图13 和图15 可以看出,在不同车速下,随着汽车速度的不断增加,车辆的横摆角速度和质心侧偏角的值也会相应增加,因此,这种情况下的车辆的操纵稳定性能也会随着逐渐变差。但是可以看出,带有模糊控制的四轮转向下的变化值相对前轮转向要小,其稳定性整体要更好。
4 结论
本文根据建立的整车动力学模型,完成二自由度理想模型的建立,并根据理想模型建立起模糊控制策略,以ADAMS 下动力学模型和MATLAB/Simulink 下的模糊控制器对角阶跃输入下的整车的操纵稳定性进行联合控制仿真。结果表明:车辆在角阶跃输入下,带有控制策略的车辆在角阶跃输入下的横摆角速度和质心侧偏角都要小于没有控制下的值,并且随着车速的增加,变化更明显。所以,模糊控制器可以有效地提高轮毂驱动电动汽车的车辆操纵稳定性。
