基于改进遗传算法的轮毂缺陷检测研究
2021-02-27张国胜张帆邹洵张召颖马保平
张国胜,张帆,邹洵,张召颖,马保平
(1.201620 上海市 上海工程技术大学 机械与汽车工程学院;2.201620 上海市 上海工程技术大学 智能机器人研发中心)
0 引言
轮毂在铸造过程中由于各种原因所产生的缺陷主要分为气孔、缩孔、缩松、裂纹和夹杂[1]。一般来说,通过人工检测的方式能够识别出轮毂缺陷的有无及缺陷的类型,但检测时间较长且效率不高,因此研究轮毂自动化检测系统是十分重要的。因企业生产成本等原因,目前对轮毂质量检测大多采用X 射线技术,但是并不能确保识别缺陷的正确性及效率[2],因此,可以以X 射线对轮毂的检测成像技术为基础,对轮毂缺陷的检测成像运用机器视觉技术进行组合优化,实现对轮毂缺陷的识别及判断。
本文主要对常见的5 种轮毂缺陷类型进行检测判断,对采集的缺陷图像进行预处理后提取出缺陷部分并针对缺陷特征进行提取,通过构建缺陷特征识别算法,实现对轮毂缺陷的检测判断。
1 缺陷图像处理
直接采集的轮毂缺陷图像具有噪声多、缺陷部分不显著等特点,若未经过预处理操作会造成识别干扰,影响检测正确率及效率[3],故要对缺陷图像运用多帧叠加去噪等预处理操作。在完成预处理操作后需要对轮毂缺陷图像进行图像分割以得到缺陷部分图像。图像分割是利用图像中灰度、颜色、纹理、尺寸等特征对所需区域进行选取的过程[4]。
1.1 Otsu 分割
Otsu 原理为:将图像分为L 个不等的灰度级,设置灰度值阈值T,将图像的像素进行分类。对图像中灰度>T 的像素集合为A0;对<T 的像素集合为A1。A0占像素总数的比例为W0;平均灰度值为U0。A1占像素总数的比例为W1;平均灰度值为U1。整个图像的灰度均值U 的表达式如下:

A0和A1的方差之和G 的表达式如下:

当G 最大时的阈值即为最佳阈值 。
对轮毂图像进行阈值处理的结果如图1所示。
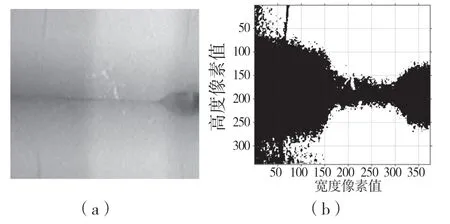
图1 轮毂进行Otsu 处理提取缺陷Fig.1 Wheel hub defect extraction by Otsu
1.2 改进阈值分割算法
从图1 可见,轮毂缺陷部分并未明显区别出来,故采取增强缺陷部分的灰度值,以增加缺陷与其周围的灰度差凸显缺陷部分[5]。
若要获得更佳的灰度差,轮毂缺陷部分可以通过与模板对比得到。模板由中值滤波处理缺陷实现。将轮毂缺陷原图像与模板图像进行图像相减操作即可得到缺陷部分图像。
轮毂缺陷图像灰度阈值选取是关键,布谷鸟搜索(Cuckoo Search,CS)算法用于寻优问题,因此采用CS 对阈值T 进行寻优。布谷鸟会随机寻找其它合适鸟窝孵化自己的鸟蛋[6]。
CS 算法步骤如下:
(1)初始化鸟窝。随机产生鸟窝X=(X1,X2,…,Xn),Xi=(x1,x2,…,xm)。其中,n是鸟窝数量,m 是每个鸟窝中鸟蛋数量。
(2)分别对X=(X1,X2,…,Xn)依据适应度函数求出质量。
(3)所有拥有鸟窝的鸟都会采取Lévy 飞行改善鸟窝。选择更优质量鸟窝进行孵化。鸟窝改善依据公式:

式中:t ——当前迭代次数;α——步长控制参数;⊕——点乘;S——Lévy 飞行路径,如下:

(4)基于p∈[0,1]改善质量不优的鸟窝公式:

(5)通过对比改善前后的鸟窝质量,择优孵化。
(6)判断是否达到设定迭代次数。若是则输出最优。若否则返回步骤(2)。
CS 结合Otsu 处理轮毂缺陷步骤流程见图2。
改进阈值分割处理轮毂缺陷过程如图3所示。
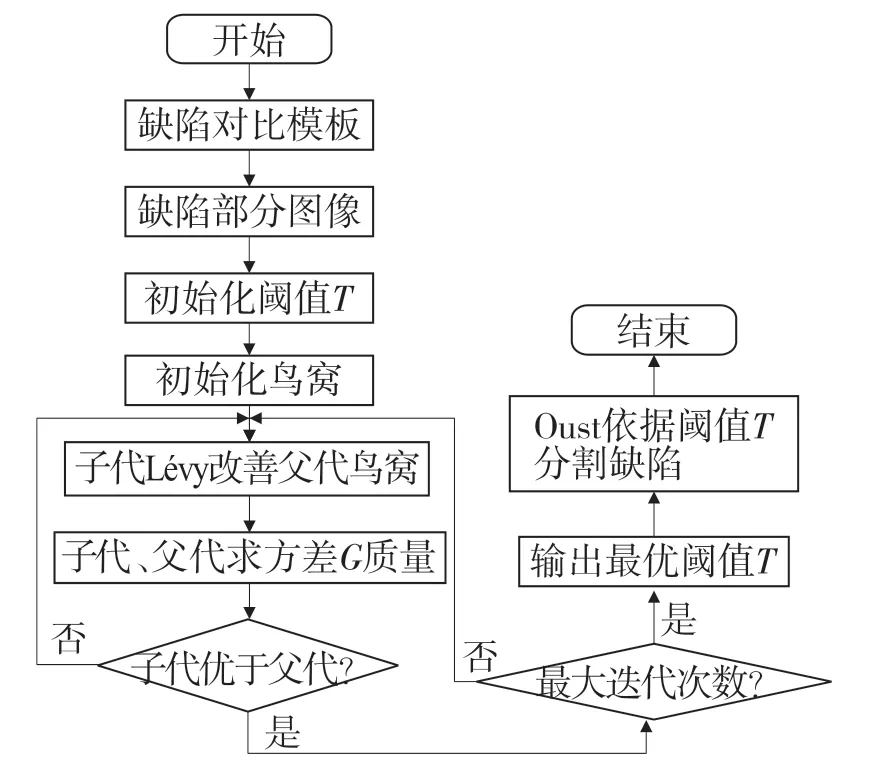
图2 CS 结合Otsu 处理缺陷流程图Fig.2 Flowchart of CS and Otsu processing defects
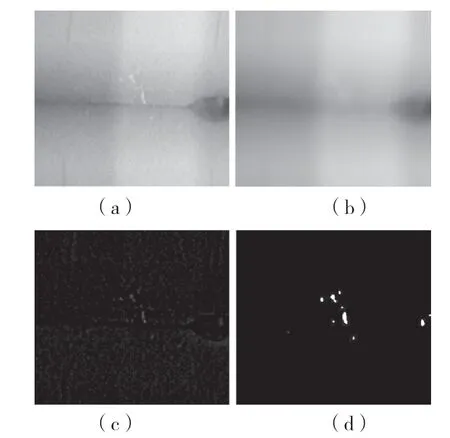
图3 改进阈值分割处理轮毂缺陷过程Fig.3 Improved threshold segmentation process for wheel hub defects
2 特征提取
对轮毂缺陷特征的提取和分类在参照ASTM E155 标准上,选取了识别轮毂缺陷类型的特征。选取的特征如下:
(1)面积。轮毂缺陷面积可通过统计经过处理后的缺陷二值图内的白色缺陷的各像素点数量总和。(2)灰度均值。将缺陷标记区域内的灰度值进行求均值运算。(3)长径。对缺陷区域的边界像素点任取两个进行遍历求最大值。(4)尖锐度。尖锐度是描述缺陷端点处的尖锐程度。(5)周长与面积比。当缺陷面积一致时,缺陷的几何形状越接近圆形,周长与面积的比值就越小。(6)长宽比。欧式距离最大与最小的比值。(7)矩形度。矩形度为缺陷形状与矩形的接近程度。
对气孔、缩松、缩孔、裂纹和夹杂缺陷的7个特征进行采集数据。因7 个特征数据的采集量度单位不一致,故对其进行归一化处理,使得采集的数据值位于0~1 之间。
3 判断缺陷类型
BP(back propagation)神经网络是正向传播、反向反馈相结合的神经网络,在轮毂缺陷类型的识别及等级的判断上具有自适应性好、准确率高等优点[7]。
BP 神经网络结构含有输入层、隐含层、输出层。
3.1 BP 神经网络算法
神经网络对轮毂缺陷的识别步骤如下:
(1)确定参数
根据输入层数n,输出层数q。故相应的输入 向 量X=(x1,x2,…,xn)T,输 出 向 量Y=(y1,y2,…,yn)T,期望输出向量O=(o1,o2,…,on)T。
隐含层数p,相应的输出向量B=(b1,b2,…,bn)T,输入层至隐含层之间的权值为Wj=(wj1,wj2,…,wjt,…,wjn)T,j=1,2,…,p。隐含层至输出层之间的权值为Vj=(vk1,vk2,…,vkt,…,vkp)T,v=1,2,…,q。
(2)正向传播输入
①θj为隐含层j 节点的阙值,wji为输入层i节点至隐含层j 节点之间的权值,则隐含层j 节点的输入值Sj

Logsig 激励函数如下:

②隐含层j 节点输出值bj:

③θk为输出层k 节点的阙值,vkj为隐含层 j节点至输出层k 节点之间的权值,则输出层k 节点的输入值sk

④输出层第k 节点的输出值yk

(3)误差反向反馈
通过计算正向传播的输出值yk的误差并反馈修正权值及阙值。
①输出层第k 节点的输出yk与期望值ok之间的误差dk:

②隐含层第j 节点校正误差ej:

③输出层至隐含层权值及输出层阙值的校正值:
式中:bj——隐含层j 节点的输出;α ——学习率。
④隐含层到输入层的权值及输入层阙值的校正值:
(4)多次训练判别
设置合理的训练次数。采用正向传播及反向反馈相结合的模式多次训练轮毂样本,使得轮毂样本的结果接近期望轮毂缺陷类型的输出值,提升轮毂缺陷类型的识别正确率。
BP 神经网络算法流程如图4 所示。
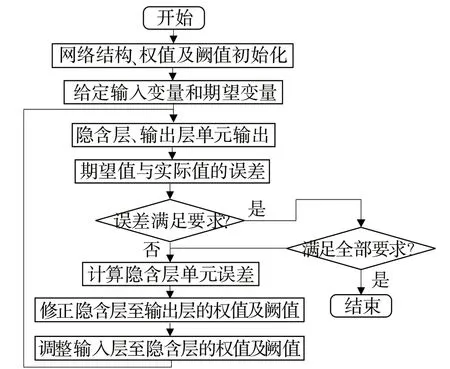
图4 BP 神经网络学习过程流程图Fig.4 BP neural network learning process flowchart
3.2 GSO 改进BP 神经网络
因BP 神经网络可能会出现收敛速度慢、过拟合及陷入局部最优等问题,同时其网络参数设置对识别结果影响较大。故需对其进行优化改进。
萤火虫群算法(Glowworm Swarm Optimization,GSO)在解决连续型最优化问题方面具有优秀的性能[8]。
(1)GSO 基本步骤如下:
初始萤火虫群,所有萤火虫都拥有等量的萤光素浓度l0和感知半径r0。
①荧光素更新

式中:J(xi(t))——萤火虫i 在t 次迭代的位置xi(t)所求得的值;li(t)——当前荧光素值;γ——荧光素更新率;ρ——荧光素挥发因子。
②萤火虫j 流入邻域集 Ni(t)概率pij(t)

式 中:Ni(t)={j:dij(t)rs——最大感知半径。
③位置更新

式中:s——移动步长。
④ 动态决策域半径更新

(2)改进GSO 引入惯性权重
GSO 可能在多次迭代后陷入极值振荡,因此借鉴粒子群中惯性权重改进策略[9],对搜索能力的优化采用的惯性权值因子如下:

式中:wmax,wmin——权重的最大及最小值;t,tmax——目前及最大迭代次数。因此,对萤火虫的改进位置如下:

(3)改进GSO 引入混沌运动
GSO 中的每只萤火虫的位置更新只会想着近邻的决策域前进,并非整体的协调优化,而混沌运动是随机过程,故引入混沌运动寻找全局最优。
Logistic 映射产生混沌序列方式如下:

线性转换寻优表达式如下:

式中:xd,max,xd,min——d 维变量的最大、最小值。
萤火虫算法优化BP 神经网络的核心是对权值wji,vkj及阙值θj,θk的寻最优值进行改进,改进后的GSO 优化BP 神经网络流程图如图5 所示。
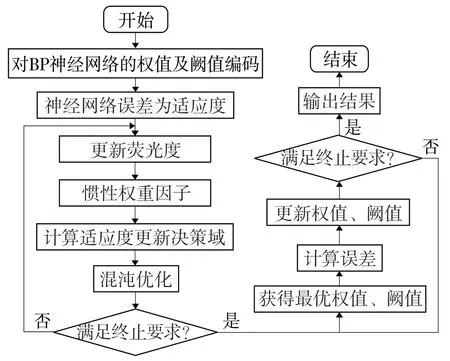
图5 GSO 优化BP 神经网络流程图Fig.5 GSO optimized BP neural network flow chart
3.3 神经网络识别结果
设计BP 系统输入为缺陷面积、灰度均值、长径、尖锐度、周长与面积比、长宽比和矩形度7 个缺陷特征数据,即输入为(x1,x2,x3,x4,x5,x6,x7)。轮毂缺陷类型气孔、缩松、缩孔、裂纹和夹杂为5 个输出。其中,(y1,y2,y3,y4,y5)为实际输出缺陷类型,(o1,o2,o3,o4,o5)为期望输出缺陷类型。
将Traincgb 训练函数所得BP 神经网络作为基础,BP 神经网络对轮毂缺陷图的误差训练函数如图6 所示。采用改进后的GSO 算法寻找最优的权值wji、vkj及阙值θj,θk并结合应用,形成新的缺陷识别模型。改进后的GSO 结合BP 神经网络的误差函数训练图如图7 所示。
将BP 神经网络及改进后的GSO-BP 神经网络对轮毂缺陷类型进行识别,识别结果见表1。
通过表1 可以看出,用改进后的GSO 结合BP 神经网络对轮毂缺陷的识别不但在正确识别率上优于BP 神经网络,而且训练时间效率上也优于常规BP 神经网络。
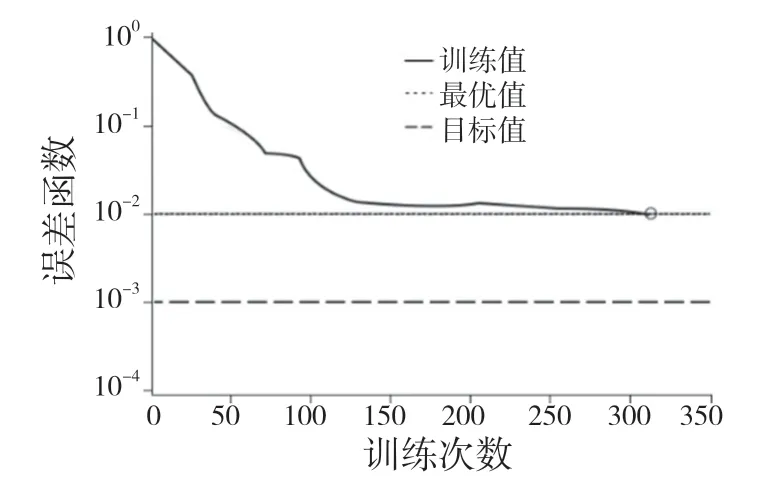
图6 BP 神经网络的误差函数训练Fig.6 Error function training of BP neural network
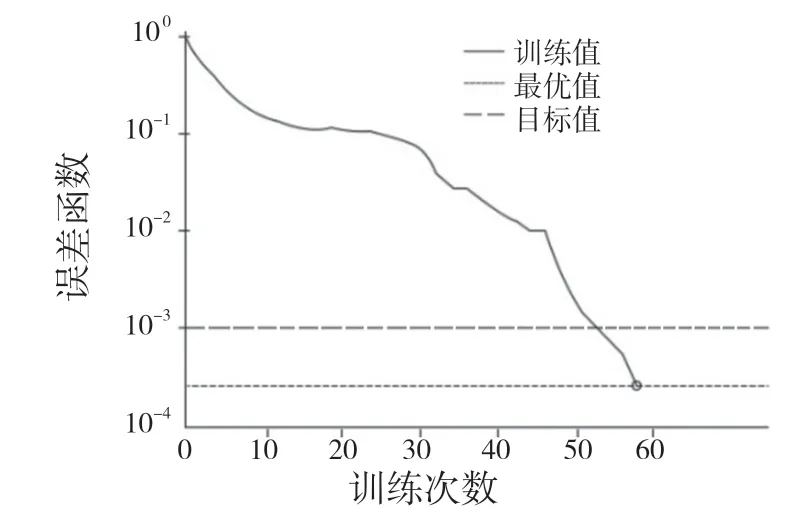
图7 GSO-BP 误差函数训练图Fig.7 GSO-BP error function training diagram
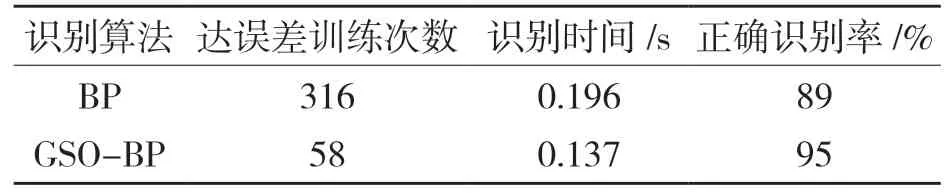
表1 不同算法下轮毂缺陷识别结果Tab.1 Wheel hub defect recognition results under different algorithms
4 结论
本文对轮毂缺陷的气孔、缩松、缩孔、裂纹和夹杂5 种常见缺陷进行识别检测。在对轮毂缺陷预处理后,通过制作缺陷对比模板得出缺陷部分图像,应用布谷鸟算法寻找最优的阈值T 结合Otsu 分割出轮毂缺陷图像,通过提取缺陷的面积、灰度均值、长径、尖锐度、周长与面积比、长宽比和矩形度7 种缺陷特征参数并进行归一化处理构建样本数据库。运用萤火虫算法优化权值wji,vkj及阙值θj,θk结合BP 神经网络实现对轮毂缺陷类型的识别。结果表明,缺陷类型的检测识别率可达95%,能够满足缺陷检测要求。
