基于ANP-SVR 的驾驶员能力预测模型设计
2021-02-27王时敏孙涛
王时敏,孙涛
(200093 上海市 上海理工大学 机械工程学院)
0 引言
纵观中国汽车行业,无人驾驶近年来正在成为其中的新兴热点[1]。世界范围内应用最广泛的SAE 分级标准将自动驾驶分为0 到5 的等级。在完全或高度自动驾驶汽车并未普及时,无人车上路行驶必将遇到人类驾驶的普通车辆,或低级别的有驾驶员监测的人机共驾汽车。在道路交通中,由人的因素导致的道路交通事故占90%左右,而驾驶员因素占人的因素的大部分[2]。驾驶员特征的建模是一个更详细的问题,引起了研究人员关注[3]。Enev[4]等利用了汽车传感器数据识别驾驶员,但是没有进行分类或驾驶能力判断。对于人机共驾以及驾驶员行为特性的方向需要深入的研究。开发人机交互式驾驶模拟仿真系统,可以为基于人车路协同的智能汽车与智能交通系统的研究提供关键技术手段。
本文针对驾驶员在高度无人驾驶中人机共驾的驾驶权分配问题,基于Prescan 智能驾驶仿真平台,进行驾驶场景搭建,设计了自由行驶、调头、红灯、跟车等驾驶工况,搭建了人机交互式的驾驶仿真系统进行数据采集实验。通过网络分析法(ANP)进行了驾驶特性指标数据分析,运用熵权法进行驾驶风险度分析,从而研究驾驶员能力与风险度的关系。此外,本研究还建立了基于SVR 算法的驾驶能力预测模型,为进一步研究驾驶员驾驶能力的动态分析进行铺垫。
1 驾驶模拟器的仿真模型搭建和硬件配合
实验的仿真驾驶场景模型搭建的准则是不能割裂人-车-环境彼此之间的关系[5],所以利用罗技G27 力反馈方向盘踏板套装实现人机交互,利用MATLAB 以及CarSim 联合仿真搭建驾驶模拟器的仿真环境和车辆模型,进行数据采集与整合。
1.1 仿真环境模型的搭建
在本次实验中,视觉驾驶场景利用Prescan软件来完成。TNO 公司旗下子公司Tass international的Prescan软件是一个开发驾驶辅助、ADAS 和智能汽车系统的仿真平台,其具有快速建立以及修改三维驾驶场景的优点,可以大大缩短研发周期,其能与MATLAB/Simulink 无缝衔接,配合CarSim 完成完美的实车状态仿真。整车模型采用CarSim 软件来搭建车辆的动力学模型。此外,本文在Prescan 道路模型内设置了红绿灯、行人、对向车流等动态仿真驾驶环境因素,以及按照道路规定设计了城市道路和高速道路。
1.2 驾驶模拟器的硬件架构
硬件方面主要包括输入装置、处理装置和输出装置。输入装置是罗技G27 力反馈方向盘套装,其搭配有方向盘、排挡和踏板装置,其11 英寸的金属方向盘转向范围有900°,与真实的汽车方向盘一致。处理装置采用的是戴尔G7 游戏本,视觉反馈的输出装置是一个外接的23.8 寸显示屏。驾驶模拟器的硬件结构如图1 所示。

图1 驾驶模拟硬件架构Fig.1 Driving simulation hardware architecture
2 数据采集与指标选取
2.1 模拟驾驶实验与数据采集
实验邀请若干位志愿者参与,年龄在23~42周岁之间,驾龄在1.5~10 年,均在身体健康、无不良嗜好且清醒状态下参与了实验数据采集,保证了仿真实验的有效性和真实性。由于仿真与真实的驾驶体验有一定差距,这个是任何驾驶仿真无法避免的,所以实验开始后会先让驾驶员自主适应一段时间。实验步骤:
(1)驾驶员按照自身条件调整踏板和座椅的距离,找到合适的姿势开始实验。(2)用20~30 min 适应实验环境和模拟驾驶场景。(3)开始驾驶模拟车辆,先是城市道路自由行驶,后进入高速道路进行跟车工况实验。(4)前车下高速行驶一段后制动,本车随即制动,实验结束。
2.2 基于实验数据的驾驶能力指标选取
采集到的原始数据距离后续分析所需要的指标还有一些差距。首先查阅文献资料,初步确定了9 项驾驶能力指标:跟车时距FT、平均速度差MDV、速度波动标准差SDS、冲击度MJt、转向盘角速度Momega、加速度标准差Std_a、车道线偏移标准差Std_d、平均速度Va、反应时间RT。通过比较相关度、重要性以及对于驾驶能力的体现,经过筛选保留了表1 所示的6 项指标。
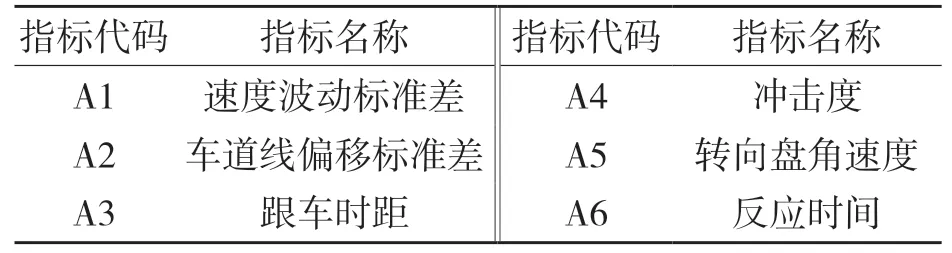
表1 指标列表Tab.1 Indicator list
3 基于驾驶数据的驾驶能力分析
3.1 网络分析法(ANP)
驾驶能力是一个模糊的概念,要用多重指标各有权重地去考量。引入层次分析法(AHP)。层次分析法是美国著名的运筹学家Satty 教授等人在20 世纪70 年代提出的[6],是一种将定性和定量相结合的多准则决策方法。由于AHP 计算时有各层次元素之间要相互独立的前提,不能很好地运用到处置驾驶能力指标互相之间的关联性、依存与反馈问题,而针对AHP 的缺陷发展起来的网络分析法ANP 正好能解决问题。
ANP 的典型结构如图2 所示。目标层和准则层又并称为控制层,控制层不一定要有准则,但至少要有一个目标作为控制元素。
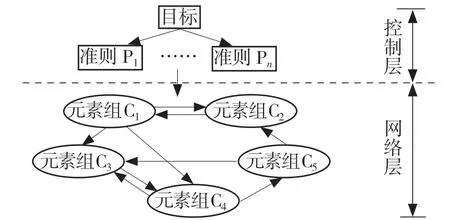
图2 ANP 网络分析法结构模型Fig.2 ANP structure model
ANP 以一种相对的标度法,充分利用人的经验以及判断计算对于所求变量的各个因素的权重。
3.2 支持向量回归(SVR)
SVR(Support Vector Regression)是基于支持向量机(SVM,Support Vector Machine)改进后专门用来解决回归问题的模型[7],其与SVM 之间区别在于,SVM 是找一个分类超平面,使得边界上的点到此平面的距离最远,而SVR 回归则是让每个点到回归线的距离最小,即对数据进行拟合,如图3 所示。
3.3 基于ANP-SVR 的驾驶员能力预测模型设计
使用网络分析法ANP 的目标是确定各评价指标对于驾驶能力评价的权重,为SVR 的驾驶员能力预测模型提供训练及测试数据库。
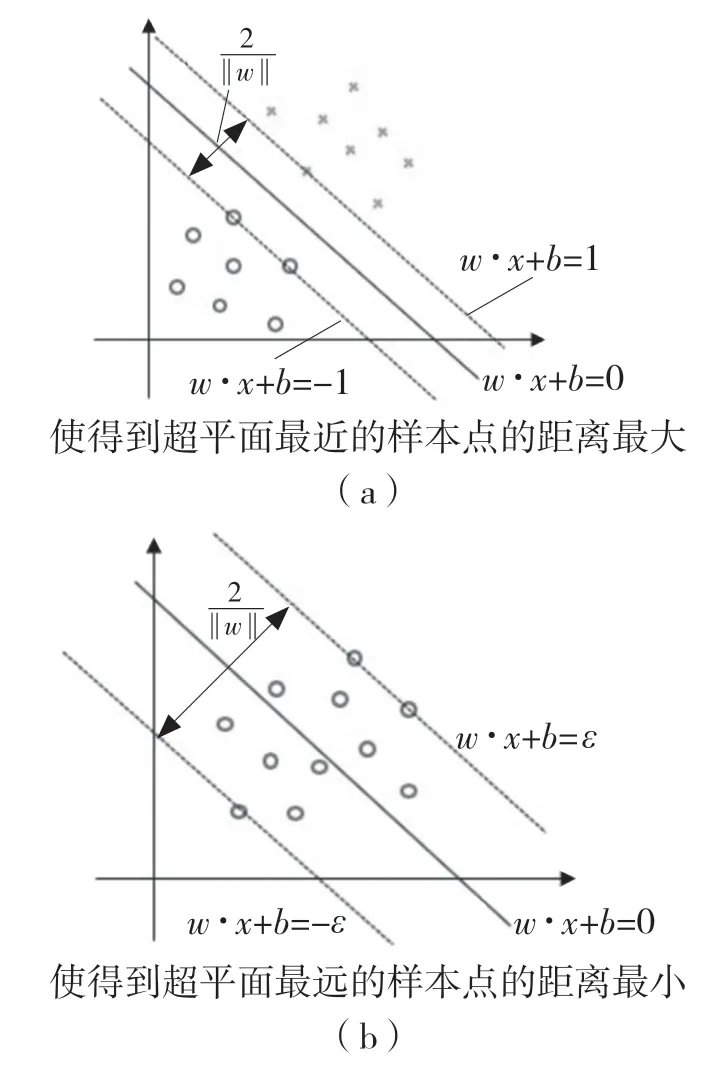
图3 SVM 与SVR 的区别Fig.3 Difference between SVM (left) and SVR (right)
ANP-SVR 具体步骤[8-10]:
(1)建立网络层次结构
控制层的目标是确定选取的驾驶能力指标对于最终驾驶员能力打分的权重大小。网络层分为操纵能力、感知能力和变量3 个元素。操纵能力元素的子元素有横向操纵和纵向操纵,感知能力元素的子元素为反应能力。变量元素的子元素为上文所决定的6 项驾驶能力指标。具体如图4 所示,在软件SuperDecisions 内搭建并实现(环形箭头表示元素内部的影响,直线、双向箭头表示元素之间的相互依存与反馈关系)。
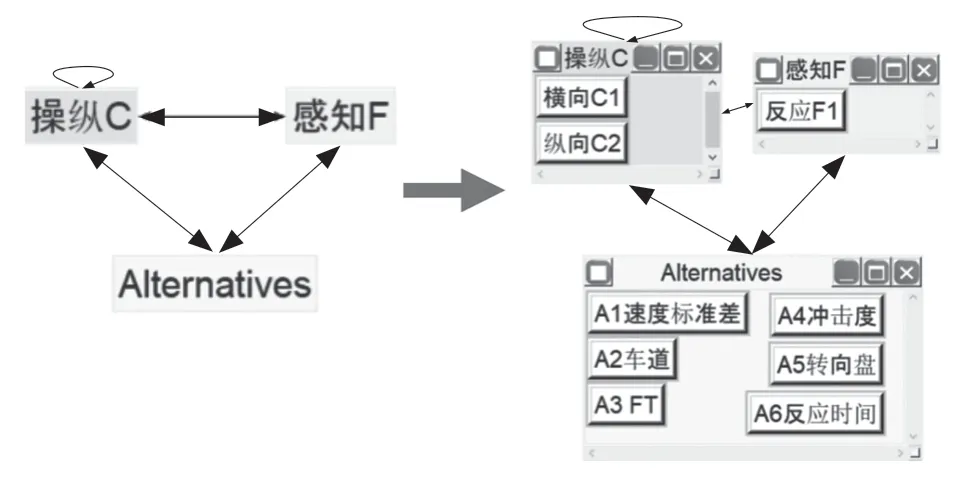
图4 驾驶能力评估ANP 网络层结构图及分解图Fig.4 ANP network layer structure diagram and exploded diagram of driving ability evaluation
(2)构造超矩阵并进行一致性检验
构造超矩阵,就要引入标度法,本次采用的是1-9 标度法,具体如表2 所示。
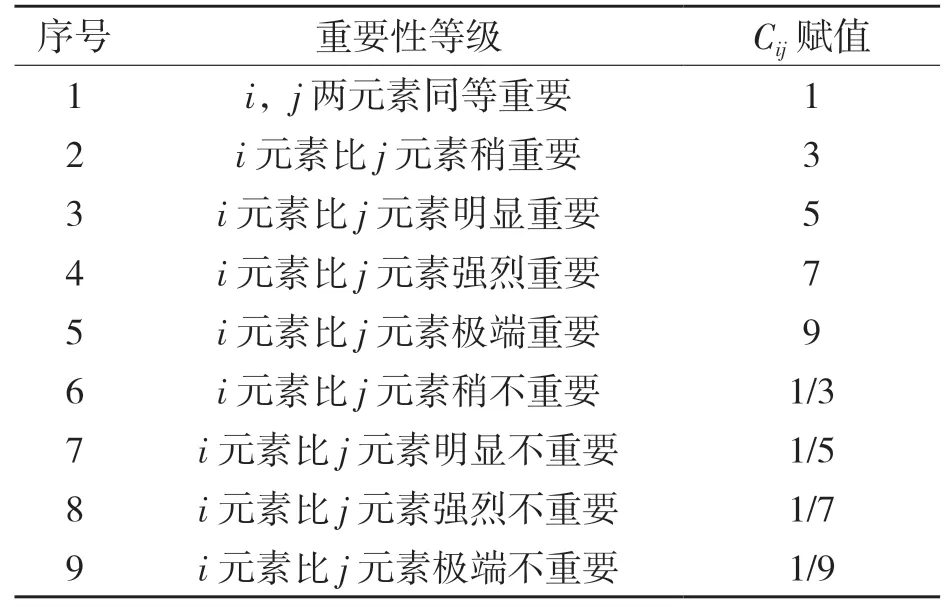
表2 1-9 标度法赋值含义Fig.2 Meaning of 1-9 scale assignment
利用以上标度法逐个构造成对比较矩阵,并判断矩阵的一致性系数CR 是否小于0.1,当CR<0.1 时才表示判断矩阵合理,否则需要修正比较矩阵。成对比较矩阵的数量由元素间的依存与反馈关系决定,成对比较矩阵得出的元素局部权重构建了未加权超矩阵Wij见表3,而后利用SuperDecisions 计算加权超矩阵见表4,并进行稳定性处理,生成最后的极限超矩阵见表5,得出全局权重。极限超矩阵中每一行的数字相同,该数字就是该行影响因素的全局权重。
(3)利用ANP 的计算结果将驾驶能力数值化
首先,将A1 到A6 六个指标的具体数据进行归一化,然后考虑到某些指标越大越好,某些指标越小越好,便把他们化归为同一方向的能力评价指标,并模糊至0~10 的范围,即建立了初始能力矩阵。矩阵每一行是一组初始驾驶能力,将其与ANP 的分析结果相结合,得到该组加权的驾驶能力评分数值。
(4)基于SVR 的驾驶能力预测
引入SVR 回归,将FT(跟车时距)、MDV(平均速度差)、MJt(冲击度)、Momega(转向盘角速度)、Std_a(加速度标准差)、Std_d(车道线偏移标准差)、RT(反应时间)作为输入,驾驶能力评分数值作为输出,建立回归模型。具体步骤如图5 所示,主要分为数据预处理(归一化处理)、核函数的选择、计算最优初始参数、建立SVR 回归模型、模型检验[9]。
回归模型的建立主要是在MATLAB 的基础上调用LibSVM 包来实现。确定了核函数及参数C、g 之后,就可以开始构建SVR 预测模型。具体操作如下:
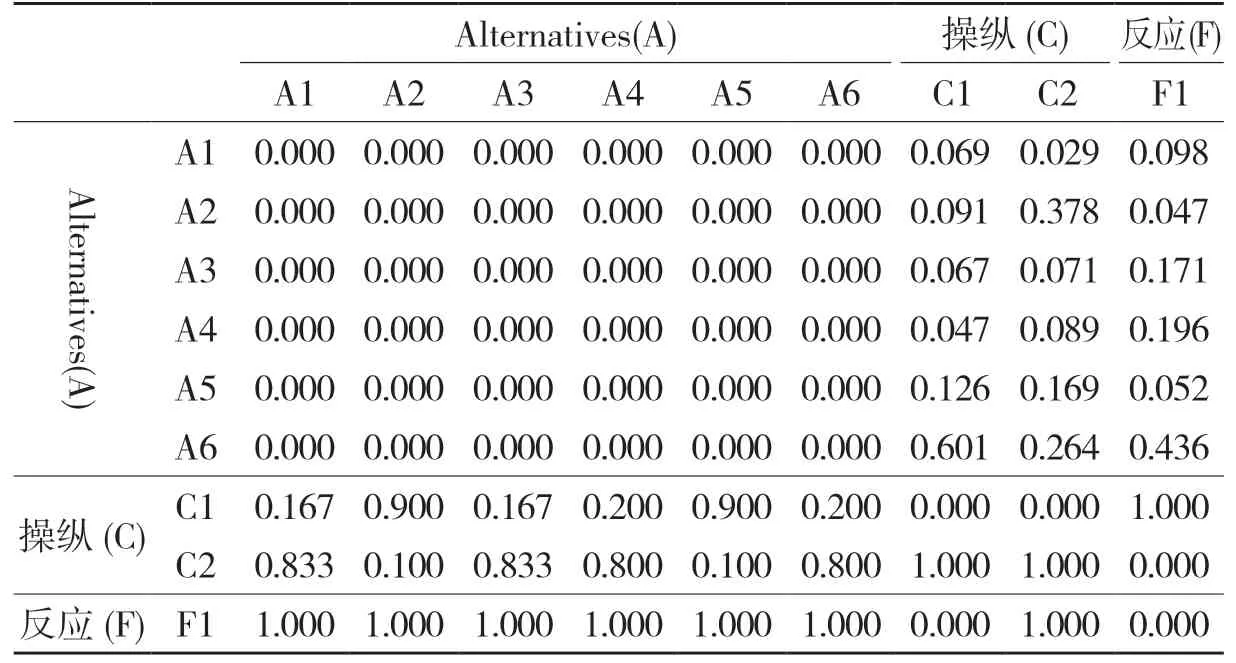
表3 未加权超矩阵WijTab.3 Unweighted supermatrix Wij
表4 加权超矩阵Tab.4 Weighted supermatrix
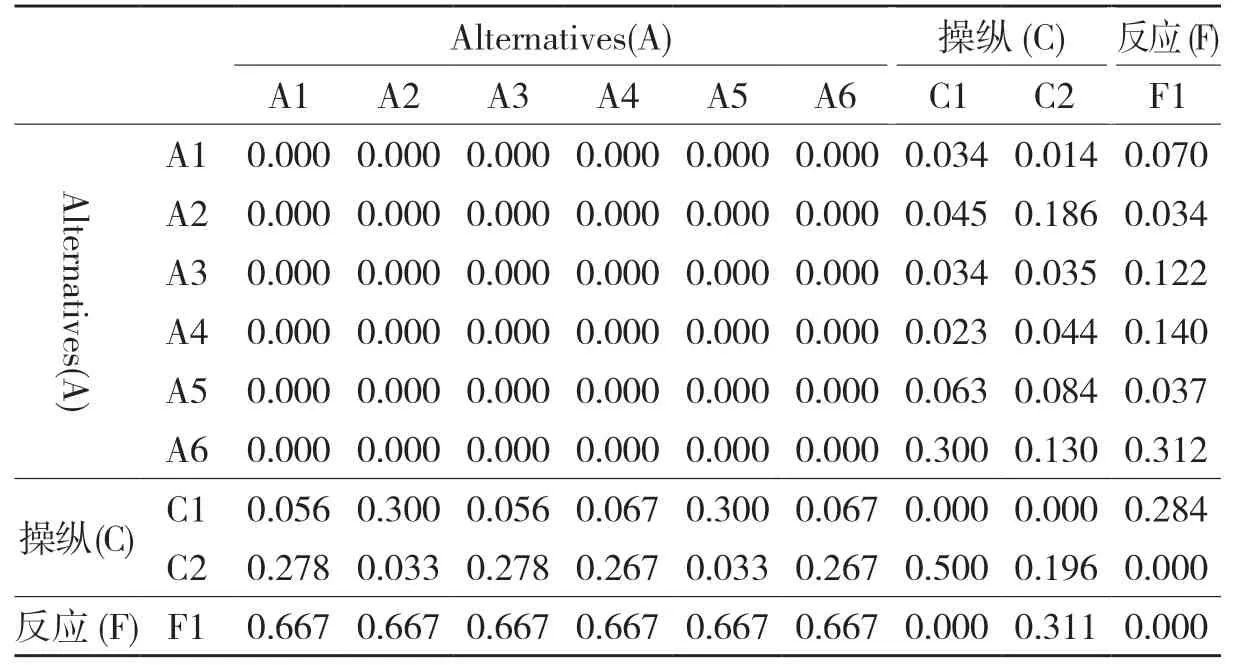
表4 加权超矩阵Tab.4 Weighted supermatrix
表5 极限超矩阵Tab.5 Extreme supermatrix
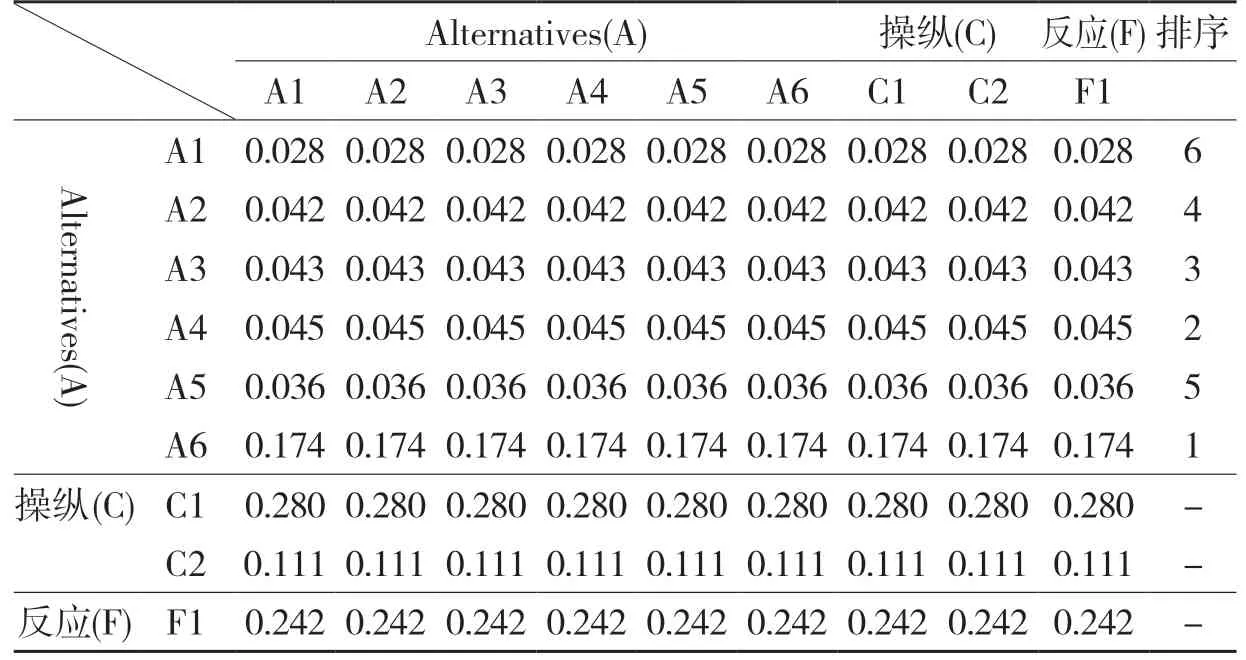
表5 极限超矩阵Tab.5 Extreme supermatrix
第1 步,数据划分。将准备好的数据样本进行划分,其中1~50 组数据样本作为训练集,51~66 组数据样本作为测试集;
第2 步,基于MATLAB 及LibSVM 建立SVR预测模型,并使用测试集数据进行验证;
第3 步,得出预测值与原始值的对比图并计算均方误差MSE 及决定系数R2。
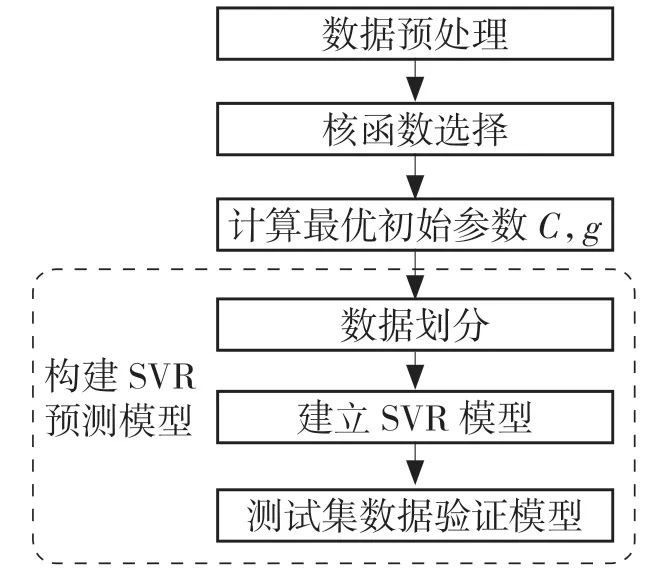
图5 SVR 算法流程图Fig.5 SVR algorithm flowchart
预测值与原始值的对比如图6所示。从图6 可以看出,SVR 预测值与原始值十分接近,均方误差值很小,决定系数R2约等于0.99,测试结果说明训练效果优秀,那么使用SVR 预测驾驶能力是十分具有可行性的,且后续可以用于实时驾驶能力的预测。
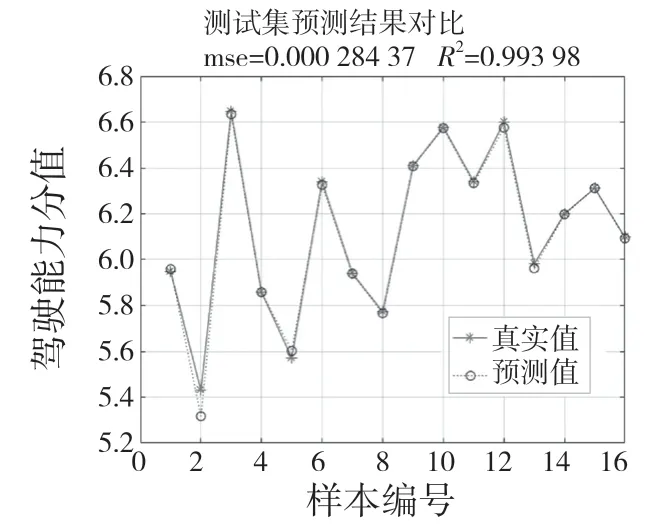
图6 预测值与原始值对比图Fig.6 Comparison chart of predicted value and original value
3.4 驾驶风险度分析
本小节用到源于热力学的熵值概念进行驾驶风险度分析,熵是对系统不确定性的一种度量[10],驾驶数据体现的不确定性便是驾驶风险度。通过熵值法得到各个指标的信息熵,信息熵越小,信息的无序度越低,信息的效用值越大,指标的权重越大。用Pj表示第j 个信息的不确定度(也即出现的概率),则整个信息(设有n 个)的不确定性度量公式为

式中:E——熵;K=1/ln(m);Pj——第j 个信息的不确定度
建立多属性决策矩阵:
则第j 个属性下第i 个方案Ai的贡献度:
定义 dj为第 j 属性下各方案贡献度的一致性程度:

则各属性权重 Wj如下:

各项权重的和为1,建立驾驶风险度模型为各项指标的加权平均值:

将3.3 节中运用ANP 计算出的驾驶能力与驾驶风险度随机选出20 组相对比,结果如图7 所示。将2 项排名数据在Excel 内进行相关性分析,计算出的相关性系数R=0.763 9>0.7,说明两项数据的关系紧密程度为非常紧密,即ANP 驾驶能力与驾驶风险度在总体上具有一致性,且紧密相关。
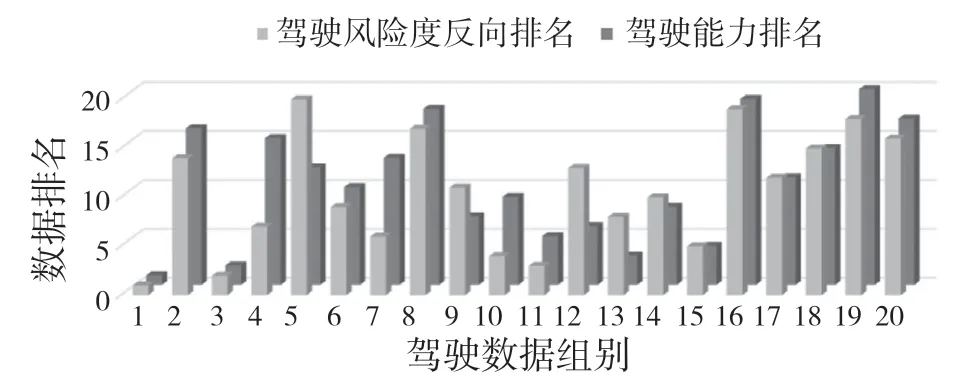
图7 驾驶风险度与驾驶能力对比Fig.7 Comparison of driving risk and driving ability
以上结果可以从侧面印证ANP 算法应用于驾驶能力评估的准确性。
4 结论
本研究基于Prescan 仿真平台搭建的驾驶场景,开发了人机交互式的驾驶仿真系统进行数据采集实验,得出结论如下:
(1)计算了在驾驶能力判断中各评价指标因素的权重,得出了冲击度、跟车时距、反应时间是判断驾驶能力的主要指标。对于驾驶辅助系统以及高级无人驾驶系统,可以在这些方面为驾驶员提供辅助;
(2)通过ANP 和SVR 算法建立了驾驶能力预测模型,模型精度高,预测值决定系数R2为0.99,可为实时驾驶能力预测的研究进行铺垫;
(3)基于熵权法计算驾驶风险度,通过将驾驶风险度与驾驶能力评估的数据相比较,其得出了数据的一致性,驾驶员的驾驶风险度越大,驾驶能力打分就越小。验证了ANP 分析法应用于驾驶员能力评估的可行性。
