无人驾驶拖拉机路径跟踪联合控制研究
2021-02-27郑平平汤玮宋伟杰张润
郑平平,汤玮,宋伟杰,张润
(230009 安徽省 合肥市 合肥工业大学 汽车与交通工程学院)
0 引言
农业是我国国民经济建设和发展的基础产业,同时也是国家独立、社会安定的基础[1-3]。我国是一个地少人多的国家,提高农机自动化与智能化水平,增加农业生产率、降低农业种植成本、增加农业生产收益是未来农业科技的发展趋势[4-5]。无人驾驶拖拉机路径跟踪控制是实现农机智能化的关键技术之一,它是指利用RTK、激光雷达、摄像头等传感器获得拖拉机的作业环境与位姿信息,为路径跟踪控制提供支持,然后用一定的控制算法控制拖拉机沿着目标路径行驶[6-7]。
国内外的研究学者对于无人驾驶拖拉机路径跟踪控制已经做了大量的研究工作。Michael O'Connor[8]等通过载波差分GPS 获得拖拉机的位姿信息,基于二自由度模型建立了拖拉机的运动学模型,开发了一个自动控制系统,并在约翰迪尔7800 型拖拉机进行了路径跟踪测试;Xiong Zhe Han[9]等研究了无人驾驶拖拉机在水稻种植中的轮胎打滑和地头转向的问题,以预瞄追踪理论为基础,设计了一种自动引导路径跟踪控制器,实现了拖拉机在水田中的直线作业和地头转向;韩科立[10]等基于速度和转向角设计了双参数最优控制路径跟踪控制器,田间试验表明,该控制器的横向偏差小于0.12 m;白晓平[11]等研究了运动学模型中近似条件对路径跟踪控制精度的影响,提出了一种自校正模型控制算法,试验表明,该方法在直线和曲线路径跟踪中均具有优势;孟庆宽[12]等建立了二自由度动力学模型和视觉预瞄模型,采用改进的粒子群算法优化模糊控制器,提高了拖拉机路径跟踪的自适应能力。
本文以HT1804F 拖拉机为研究平台,建立了无人驾驶拖拉机-路径侧向动力学模型,利用滑模控制的强鲁棒性,提出一种基于横向偏差和航向偏差的路径跟踪联合控制算法,采用饱和函数代替符号函数来降低滑模控制的抖振,联合CarSim 与Simulink 软件设计了仿真试验。结果表明,该路径跟踪联合控制算法能够使拖拉机稳定、精确地跟踪目标路径,能够满足无人驾驶拖拉机路径控制的要求。
1 路径跟踪模型
本文的研究对象是一个前轮转向、四轮驱动的轮式拖拉机,行驶速度较低,因此不考虑侧滑、翻转和纵向力。因此,可将拖拉机简化成一个具有侧向和横摆运动的两轮车模型,如图1 所示。图1 中,点C 是拖拉机的质心;点P 是期望路径上的预瞄点;β 为拖拉机的质心侧偏角;FY1和FY2分别为地面作用在前轮和后轮侧偏力;v 为质心速度;φc为拖拉机的航向角;φp为预瞄点P 处的航向角;L 为前视距离;YL为横向偏差。
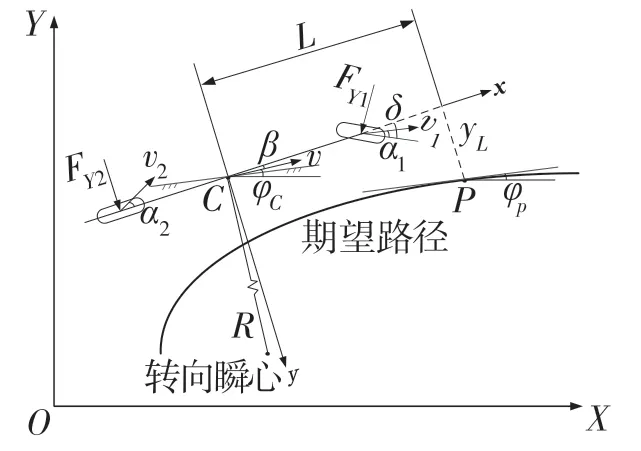
图1 无人驾驶拖拉机-路径侧向动力学模型Fig.1 Lateral dynamics mode of driverless tractor-path
建立的拖拉机动力学方程如下[13]。

式中:m——拖拉机的整车质量;l1,l2——拖拉机的质心到前轴和后轴的距离;wr——横摆角速度;vx——纵向速度;vy——横向速度。
当车轮的侧偏角较小时,轮胎的侧向力和侧偏角可以近似看做具有线性关系,因此

式中:k1,k2——拖拉机前轮和后轮的侧偏刚度;α1,α2——拖拉机前轮和后轮的侧偏角。因此,拖拉机的动力学方程可以表示为
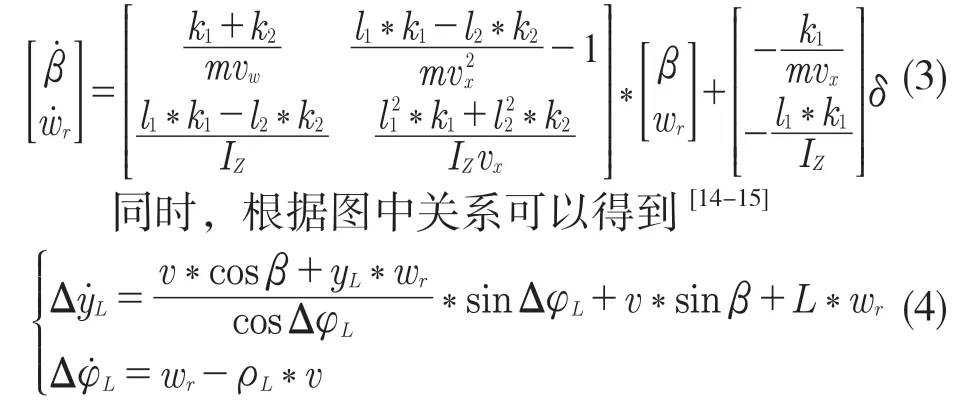
式中:ρL——P 点处的道路曲率。根据小角假设,式(4)可写为

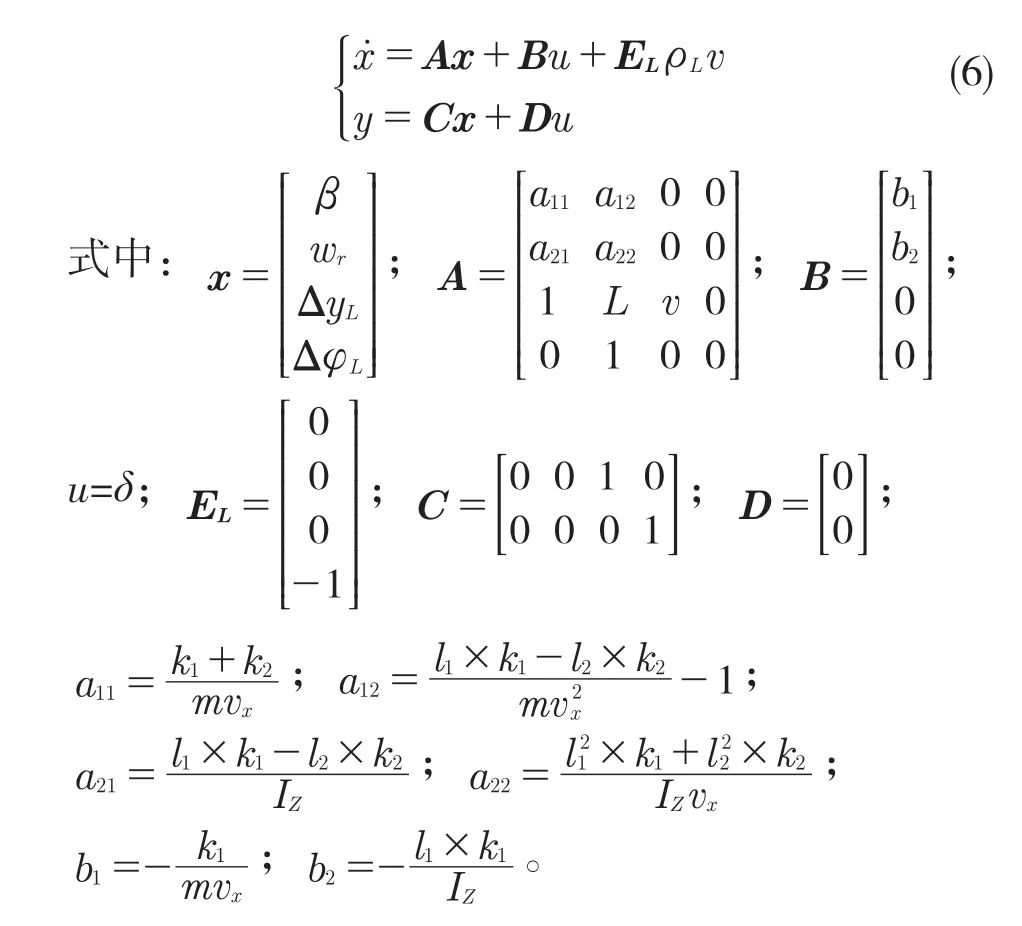
结合式(3)和式(5),可以得到无人驾驶拖拉机-路径侧向动力学模型:
2 路径跟踪控制
无人驾驶拖拉机路径跟踪的主要控制目标是,采用一定控制算法,使拖拉机沿着目标路径行走,即使拖拉机与路径之间的横向偏差和航向偏差为0。因此,本文在研究了滑模控制算法的基础上,设计了无人驾驶拖拉机联合控制算法,以预瞄点P 处的横向偏差和航向偏差作为控制的输入,输出为转向角δ。控制框图如图2 所示。
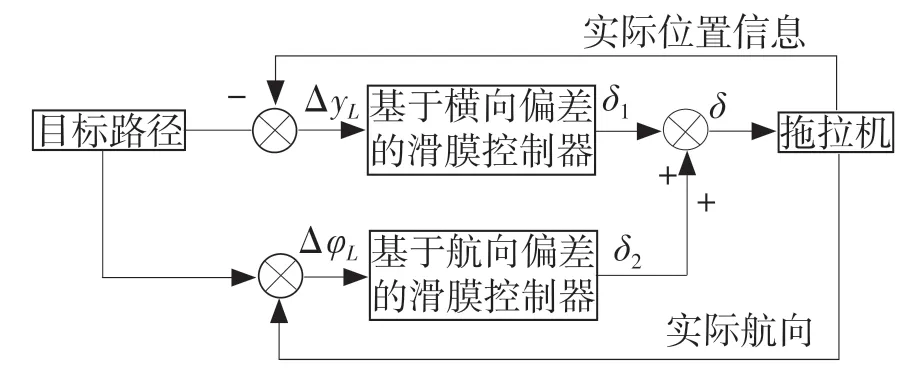
图2 无人驾驶拖拉机路径跟踪控制框架Fig.2 Path tracking control framework of driverless tractor
滑模控制,即变结构控制,对于参数摄动和外界扰动具有强鲁棒性,因此,本文选择滑模控制方法来设计路径跟踪控制器。
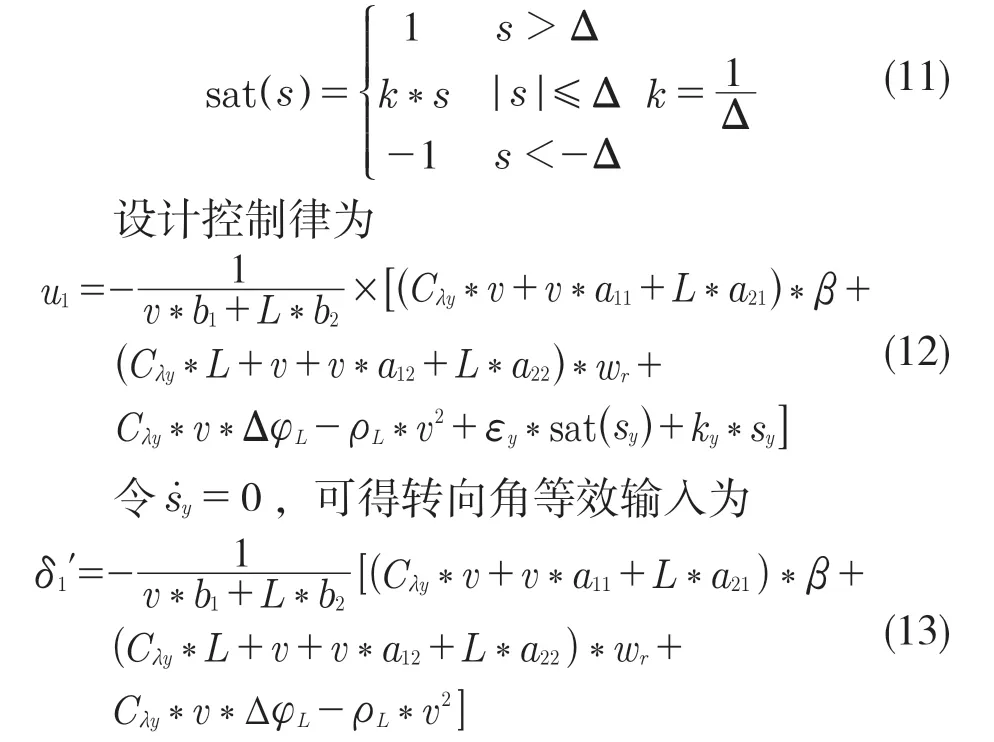
2.1 基于横向偏差的滑模控制器设计
基于横向偏差的滑模控制器系统输入选择拖拉机横向偏差,即

设切换函数为

对切换函数进行求导可得:

由于指数趋近律的趋近速度是从大到小,不仅降低了到达切换面的速度,还减少了趋近时间。因此,选择指数趋近律的控制方式。同时,为了降低抖振,采用饱和函数代替符号函数,所以

式中:εy——等速趋近律系数;kv——指数趋近律系数;εv>0,ky>0;sat(·)——饱和函数,表达式为
利用李雅普诺夫理论进行稳定性判定,选择函数为

其中,ηy>0,因此设计的控制器满足稳定性要求。

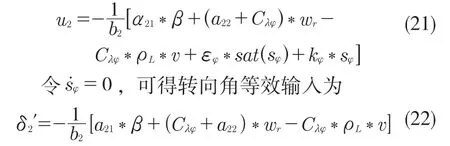
2.2 基于航向偏差的滑模控制器设计
基于航向偏差的滑模控制器系统输入选择拖拉机航向偏差ΔφL,即

对切换函数进行求导可得:

式中:sφ——等速趋近律系数;kφ——指数趋近律系数;εφ>0,kφ>0;sat(·)——饱和函数。设计控制律为
利用李雅普诺夫理论进行稳定性判定,选择函数为

其中,ηφ>0,因此设计的控制器满足稳定性要求。

式中:k1、k2——比例系数。
3 仿真试验
为了验证所设计的无人驾驶拖拉机路径跟踪联合控制算法的有效性,本文联合了MATLAB/Simulink 和CarSim 进行仿真,路径跟踪控制算法参数如表1 所示,仿真路径如图3 所示。
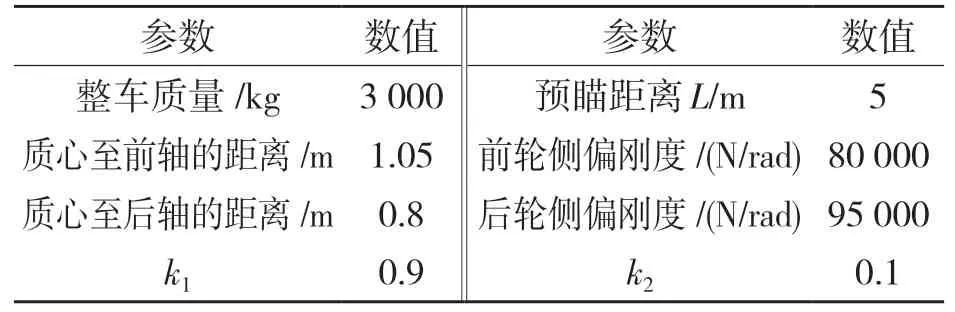
表1 路径跟踪控制算法参数Tab.1 Parameters of path tracking control algorithm
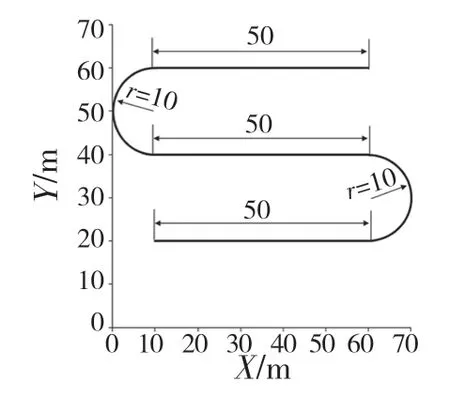
图3 仿真路径Fig.3 Simulation path
3.1 仿真1:不同附着系数下的路径跟踪误差对比
拖拉机的工作环境一般为农田,工作速度低,一般在0~15 km/h 之间,土壤的附着系数一般为0.2~0.6,因此,设仿真路面附着系数为0.2,0.4,0.6,得到仿真结果如图4 所示。
由图4 可知,当速度一定时,随着路面附着系数的降低,无人驾驶拖拉机在转弯时的路径跟踪误差增加,这是由于当拖拉机在附着系数较低的路面上行驶时,地面提供的附着力较小,导致侧向滑动增加,所以路径跟踪误差增加。当μ=0.2 时,最大路径跟踪误差绝对值在0.23 m 左右,说明设计的路径跟踪联合控制算法在低附着系数的路面上具有较好的控制效果。
3.2 仿真2:不同速度下的路径跟踪误差对比
由上述分析可知,速度一定时,路面附着系数为0.6 时的路径跟踪误差较小,控制效果较好,因此以μ=0.2 为例,分别设置仿真速度为5,10,15 km/h,得到的仿真结果如图5 所示。
由图5 可知,当v=5 km/h 时,设计的路径跟踪联合控制算法的跟踪效果最好,路径跟踪误差在0.14 m 之内。随着拖拉机的速度增加,无人驾驶拖拉机在转弯时的路径跟踪误差增加,最大路径跟踪误差绝对值在0.19 m 左右,但仍能较好地跟踪仿真路径,说明设计的路径跟踪联合控制算法对车速变化有较好的适应性。
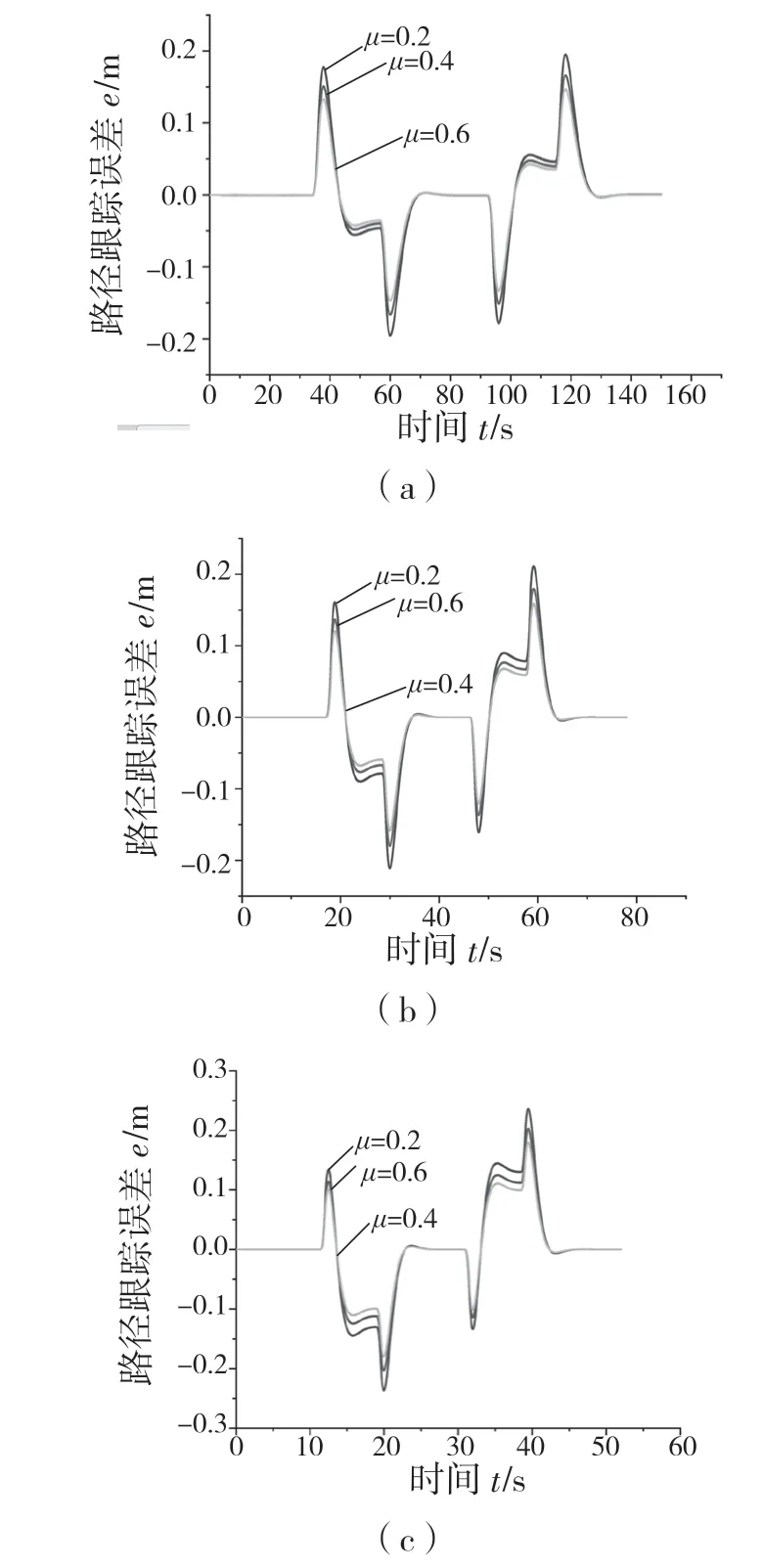
图4 路径跟踪误差仿真结果Fig.4 Simulation results of path tracking error
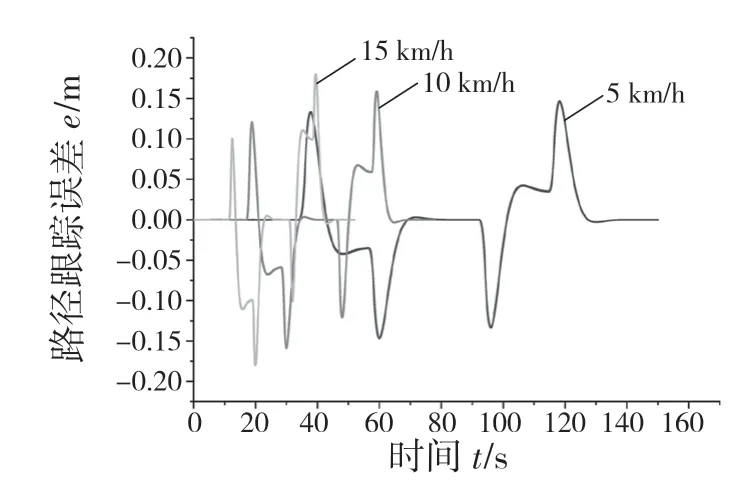
图5 μ=0.6 时的路径跟踪误差Fig.5 Path tracking error whenμ=0.6
4 结论
本文首先基于中国·徽拖HT1804F 型拖拉机建立了无人驾驶拖拉机-路径侧向动力学模型,然后根据预瞄点处的横向偏差和航向偏差分别设计了基于横向偏差的滑模控制器和基于航向偏差的滑模控制器,分别得到了δ1和δ2,二者结合得到最终的转向角δ。同时,联合Simulink和CarSim 进行仿真试验,结果表明,设计的无人驾驶拖拉机路径跟踪控制算法对路面附着系数变化和车速变化都有较好的适应性,路径跟踪误差在为0.23 m 之内,验证了设计的无人驾驶拖拉机路径跟踪联合控制算法具有较好的控制效果,适应性高,满足路径跟踪控制的要求。
