低重力环境下基于超弹性铰链的某折展机构展开动力学研究①
2021-02-23张书洋张朴真倪彦硕姚怀博
张书洋,张朴真,倪彦硕,姚怀博
(1.北京空间飞行器总体设计部,北京 100094;2.哈尔滨工业大学航天学院,哈尔滨 150001)
0 引言
在月球、火星等探测任务中,星球车上科学载荷的构型布局以及体积重量受到星球车总体积重量的严格约束,需采用轻量化折展机构实现载荷构型的着陆后重构[1-3]。 超弹性铰链是一种利用薄壳结构的大挠度变形和超弹性储能实现折叠和展开的广义铰链,它集驱动、回转和锁定等功能于一体,具有轻质、低耗能、重复性好和对准精度高的特点[4-5]。 近年来逐步应用于伸展臂、太阳帆、可折展天线、聚光反射器和空间光学探测等设备中,能够有效地降低空间机构质量和功耗[6]。 以往对此类空间机构的研究和应用多集中于无重力环境下,鲜有针对月球、火星等低重力场下的应用研究。 文章针对一种采用超弹性铰链的折展机构建立有限元模型,并分析研究了不同重力场下折展机构的展开动力学,并开展了地球重力条件下的试验验证。
1 折展机构设计简述
该折展机构以火星车火星表面土壤成分探测天线为需求背景进行设计[7],如图1 所示,该机构为非对折的两折杆构型,发射状态收拢,随火星车着陆火面后展开重构为完整的天线。 根部铰链转轴偏置,最终展成的天线相对于收拢状态有16°仰角,可以避免火星车车体倾斜时天线碰撞火星表面。

图1 折展机构系统构型Fig.1 Configuration of the two-rod deployable antenna
整个展开机构主要由根部铰链、长杆、超弹性铰链、短杆等组件串联组成。 根部铰链为定轴式铰链,由涡卷簧驱动。 根部铰链收拢力矩1 N·m,展开状态0.5 N·m,展开角度180°。
长杆和短杆均由外筒和内板组成,外筒为内径φ10.8 mm,外径φ12 mm,内板为宽度1 mm,高度与内径一致,如图2 所示。 长杆长度700 mm,短杆长度580 mm。
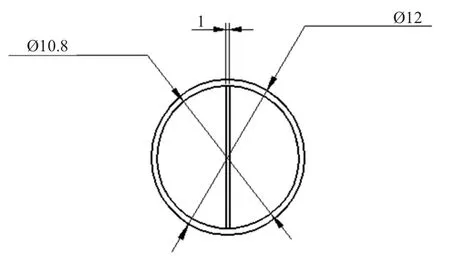
图2 杆截面Fig.2 Section of the antenna rod
超弹性铰链作为杆间铰链,具体结构形式如图3 所示。 带簧是该铰链的核心部件,通过自身的大变形实现铰链的展开与收拢。 超弹性铰链两侧各安装了3 片带簧,共6 片,带簧长度为90 mm,单片带簧厚度0.12 mm。 通过压板将带簧压在接头上,长、短杆和接头连接。

图3 超弹性铰链示意Fig.3 The hyperelastic hinge in deployed (a) and stowed (b) state
2 折展机构展开过程动力学分析
2.1 分析模型建立及简化
对机构组成进行分析,依据各部分的刚度不同对机构模型进行简化,最后得到的简化模型主要部件包括:根部连接块、长杆、短杆、带簧、杆间连接块。对于长短杆结构以及带簧结构,由于其厚度远远小于其他尺寸,因此在建模过程中,将其简化为壳体结构。 根部连接块和杆间连接块转化为离散刚体。 表1 列出了杆和带簧关键部件的材料属性。

表1 材料属性Tab.1 Characteristics of materials of rods and hinges
如图4 所示,坐标系1 为全局坐标系以X轴正方向为竖直向上,以Z轴正方向为沿杆水平方向,由右手定则得到Y轴方向。 坐标系2 为根部坐标系,由于根部铰链转轴偏置,最终展开所得到的长杆相对于收拢状态有16°仰角,此坐标系相对于全局坐标系有8°的水平偏转角。 选取天线末端为运动特征点开展后续分析工作。

图4 分析模型示意Fig.4 The FEM model of the antenna.
对于文章所要分析的带簧模型,其实际装配中为单侧三片簧构型,单片厚度0.12 mm,考虑加工误差实际厚度在0.11 ~0.13 mm 之间。 在机构展开过程中,假定带簧簧片之间未发生相对滑动,将三片带簧堆叠结构简化为单片簧结构。 由于带簧的展开和收拢,实际上可以近似为薄壁结构沿截面方向的弯曲行为。 这一过程中,最重要的参数就是结构的截面弯曲刚度。 利用材料力学[8]知识,可得到等效厚度约为0.159 ~0.187 mm 之间,为分析方便,文中等效厚度取为0.16 mm。
2.2 分析工况设置
人类探索太空的脚步,从早期采用天基或地基观测站对深空进行观测探测,发展到上个世纪采用航天器掠过或环绕探测目标进行飞掠或环绕探测。随着航空、航天和国防技术的快速发展,人类越来越多地采用精度更高的着陆探测方式进行深空探测。从目前已有的着陆探测案例来说,以月球和火星探测为主,也兼有各类小行星探测。
月球、火星和小行星其重力场与地球有较大差异,文中针对对象为着陆探测的载荷,均为星球表面[9-10]。 月球表面重力约为地球表面重力的1/6;火星表面重力约为地球表面重力的1/3;小行星则由于自身体积重量不同,导致重力场分布和重力有差别,但其重力大小和地球相比微乎其微,为讨论方便,按无重力计算。
综上,重力场共设置四种工况:0g,1/6g,1/3g和g。 其中g=9.8 m/s2,即地球重力, 1/6g针对月球重力,1/3g针对火星重力。
由于地面试验为地球重力状态,因此以地球重力工况为例对分析结果进行说明。
2.3 展开过程动力学分析
2.3.1 机构系统运动情况
地球重力场下折展机构系统在展开过程中不同时间节点的运动情况如表2 所列,其中正视图为面对机构观察的视图,俯视图为俯瞰机构展开的视图。

表2 地球重力场下折展机构系统展开过程Tab.2 Deployment process of the mechanism analyzed in earth gravity environment
从图中的仿真结果来看:
1)在展开过程的初始阶段,由于重力作用所引起的短杆(自由端杆)的下坠现象较为明显,大约在0.45 s 时自由端位移达到了最低点。
2)展开过程进行至约0.7 s 时,带簧恢复原状即锁定,长、短杆间此后无相对运动,其自由端运动轨迹是长杆匀速展开与短杆自由端相对两杆连接处正弦振动的运动合成。
3)展开过程进行至约1.4 s 时,根部铰链转角达到180°,并且在随后的运动过程中根部铰链并未继续发生运动,根部锁止约束起到了作用。
4)在后续的运动过程中主要以“加长杆”的振荡运动为主,其自由端在空间轨迹近似为X方向和Y方向简谐运动的合成。
2.3.2 机构系统动能变化情况
不同重力场工况下整个展开过程中的动能随时间变化如图5 所示。 汇总不同重力场下机构系统中几个关键的时间节点,如表3 所列。 根据图5 和表3 中的分析结果,可以将带簧折展机构的展开过程大致分为三个阶段:

表3 不同工况动能及时间节点数据Tab.3 Kinetic energy and key time data in different gravities
1)带簧的弹性恢复阶段:此阶段中,机构在带簧自身弹性的作用下自由伸展,弹性势能转化为动能。 与此同时,重力始终对结构做功,重力势能转化为动能。 在动能曲线中,该阶段为起始点至第一个峰值(波动)处。
2)整体转动阶段:此阶段中,带簧在短时间内恢复原状,并且由于刚度的突然增大起到了锁定的作用,使得长短杆与带簧近似成为一体结构。 该结构在根部驱动力矩的作用下一直转动,此时根部力矩不断对结构做功,故整体动能不断上升。 同时从图5 中还可以发现,在此阶段中动能存在波动,并不是平滑曲线,根据图5 所示机构系统运动过程可以发现:在两杆合为一体后的转动过程中还伴随着低频振荡运动,故动能存在微弱波动情况。 在图6 所示曲线中,该阶段为第一峰值至第二峰值之间。

图5 不同工况下折展机构系统动能变化情况Fig.5 Variation of the mechanism system’s kinetic energy analyzed in different gravity level

图6 不同重力场下同时刻带簧的展开状态Fig.6 Deployment status of the hyperelastic hinge at different situation
3)根部铰链锁止阶段:在根部铰链转至180°后,根部铰链锁定,此时结构做有阻尼系统自激振荡,在材料阻尼作用下整体动能逐渐较小,最后会趋近于0。
通过对比图表中的各项数据可以发现根据工况不同,展开机构在展开过程中的各项指标变化情况具有一定的规律:
1)随着重力加速度由大到小变化,带簧初次恢复原状的时间逐渐变长。 展开过程带簧的变形云图如图7 所示,由于重力的作用,使得带簧两侧转接块的相对夹角更大,进而使带簧结构更迅速地恢复原状。
2)随着重力加速度由大到小变化,整体展开机构锁止(转过180°)的时间逐渐变短。 根据前文的展开过程各时间点的结构变形图,可以做出推断:由于重力的存在,其始终对整体结构做功,导致整体机构在做绕轴转动的同时,还要抗衡重力对结构的影响,故转动的能量有一部分被用于抵消重力做功,故整体锁止时间有所延长。
2.3.3 特征点运动情况
选取图4 所示自由端为运动特征点,提取其在展开过程中的X方向位移和速度,如图7 和图8 所示。

图7 不同重力场工况下特征点的X 方向位移Fig.7 Displacements of the free end point of the rod in different gravities
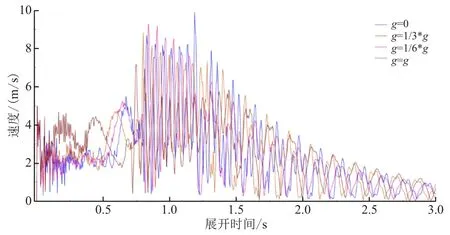
图8 不同重力场工况下特征点的速度响应情况Fig.8 Velocities of the free end point of the rod in different gravities
通过对不同重力场工况下特征点的位移和速度进行分析,可以得到:
1)在带簧恢复原状之前的阶段,特征点的运动轨迹波动最严重,且X方向的位移受重力大小影响较大,但该影响非线性增加。 地球重力工况下,位移最大,可达到0.6 m;零重力工况下,位移最小,约为0.3 m。
2)速度分析结果与前述机构系统动能分析结果相同,特征点速度受重力影响。 特征点的最大速度出现在根部铰链锁止时。 地球重力工况下,该速度最小,约为7 m/s;零重力工况下,该速度最大,约为9 m/s。
3 地面试验验证情况
为验证折展机构系统展开过程动力学分析的结果,获得特征点的最大位移,开展了机构系统的展开试验。 试验过程中,由于展开时间很短,特采用高速摄像方式对展开过程进行监测。
图9 为高速摄像过程中采集的特征点X方向最大位移照片,经测算该最大位移为494 mm,约0.5 m。 该结果与 2. 3. 3 节X方向最大位移0.6 m 的分析结果基本相当,可以认为数值仿真计算结果及部件运动规律均与实际相符合,文中所采用的分析方法以及等效方法等具有一定的科学性,可以推断低重力场下的机构运动分析可信。

图9 高速摄像下的特征点竖直方向最大位移示意图Fig.9 The maximum displacement of the free end point snapped by high-speed camera
4 结论
介绍了一种采用超弹性铰链的折展机构,建立了该折展机构的有限元模型,分析了不同重力场下折展机构展开动力学过程,系统运动位移和动能随时间变化情况,并针对自由端特征点位移进行了详细分析。 通过地球重力条件下的展开试验,验证了分析方法的正确性,针对低重力场情况的分析结果可为工程应用提供借鉴。 同时,该分析方法也可为未来深空探测中更长尺度天线采用超弹性铰链的折展机构系统奠定分析基础。
