基于BIM技术的管道阀门自动定位
2021-02-11杜前洲蔡亚桥杨礼桢杨周周刘宇圣
杜前洲 蔡亚桥 杨礼桢 杨周周 刘宇圣
(中铁第四勘察设计院集团有限公司,武汉 430063)
1 BIM技术与可视化编程
在双碳背景之下,作为碳排放大户,建筑业亟待转型升级[1-2]。国家陆续出台一系列政策标准,从新技术、新能源、新材料和信息化等科技应用和发展方面,推动建筑行业开启新一轮的发展[3-5]。BIM(Building Information Model,建筑信息模型)技术作为实现建筑信息化的重要手段,对加快推进建筑业数字化转型与实现双碳目标具有重要意义[6-7]。BIM概念起源于上世纪70年代[8],并于本世纪初在美国开始应用,近二十年来,BIM应用项目已扩展到包括欧美、日韩、中国在内的世界范围。据统计,在欧美国家应用BIM的项目数量已超过传统项目[9]。BIM技术正以高速发展的态势改变着整个土建行业的面貌。
Dynamo for Revit是基于Autodesk公司建模软件Revit开发的可视化编程插件,适用于工程师们在不用深入学习编程语言的前提下,进行可视化编程,从而完成较为复杂的建模任务。文献[10]借助Dynamo对水力机械中复杂的蜗壳和尾水管进行设计,实现了模型的"一键生成"。文献[11]基于Dynamo软件实现了快速、高效放置钢板桩和结构钻孔桩,大幅提高设计效率。文献[12]利用Dynamo可视化编程功能完成了复杂的曲面造型,提高模型的生成和修改速度。
给排水、通风空调等专业的各类水管在施工阶段,一般以工厂预制的6m长原管为原材料,在施工现场进行切割和拼接,以满足现场各种安装长度的实际需求。从节约资源、降低施工成本角度出发,优秀的设计可以考虑将阀门等管道附件设置在特定位置,以最大限度利用既有的6m长原管。在信息化发展的大背景下,有必要开发一种基于BIM技术的管道阀门自动定位方法,既可以满足现场需求,减少切管,又不增加工程师的设计压力。本文工作便是在此背景下展开。
2 研究目标与技术路线
考虑6m长的水管原管,阀门在管道上的位置可能存在4种情形,如图1所示。情形1中阀门两端的水管长度之和小于6m; 情形2中阀门两端的水管长度之和等于6m; 情形3中阀门两端的水管长度之和大于6m,但每端的长度都小于6m; 情形4中阀门两端的水管长度之和大于6m,且存在至少一端的长度大于6m。各种情形中存在阀门位于管道左侧、中点及右侧的三种情况。为充分利用6m长原管,本文提出的阀门自动定位的方法需实现的目标是:对于阀门两端长度之和小于或等于6m的情形1、2,需移动阀门到管道的端头; 对于阀门两端长度之和大于6m的情形3、4,需移动阀门,使得阀门两端中长度接近6m的一端被调整为6m。而且在移动时,需尽量减少阀门偏移的距离,以保证与原设计的一致性。

图1 阀门在水管上的位置示意
基于以上分析,结合Dynamo可视化编程方法,本文采取如图2所示的技术路线。首先分析阀门在管道上的位置,并明确实现阀门定位的目标;其次借助Revit+Dynamo平台,确定阀门移动的方向和距离,实现单个阀门的自动定位;然后在单个阀门自动定位的基础上,自定义Dynamo节点,进而实现多个阀门的自动定位;最后对本方法进行试验,验证方法的正确性和准确性。

图3 获取阀门两端管线参数的Dynamo模型

图2 本文技术路线
3 单个阀门自动定位
3.1 获取阀门两端管线图元
阀门自动定位依据的是阀门两侧连接的管线长度,因此,首先需要通过Dynamo获取Revit界面中阀门两端的管线图元。通过“Select Model Elements”节点选择待调整的阀门图元,然后利用Dynamo机电分析包“MEPover”中的“MEP Fitting connected MEPCurves”节点确定阀门两端的管线图元,并将其转化为便于数据处理的曲线。通过“Element.GetLocation”节点获取曲线的定位、方向、长度等几何参数。此部分Dynamo模型如图3所示。
3.2 确定阀门移动方向
图4展示了确定阀门移动方向的Dynamo模型。为简化模型,借助“Python Script”节点判断阀门移动的方向,模型中“Python Script 1”可通过阀门两段管线的长度自动判断阀门移动方向,其判断逻辑如图5所示。按图5所示的判断逻辑,其结果是当阀门两端管线长度之和小于6m时,阀门往短边移动; 当阀门两端管线之和大于6m时,阀门往管线长度最接近6m的一边移动。按此原则,可保证阀门调整的距离最小,不影响整体性设计,同时保证在施工时充分利用6m长的原管,减少裁管及浪费。借助“Python Script 1”确定阀门移动方向后,在Dynamo模型中利用自带的节点,生成一个单位向量来表示移动的方向,如图4所示。
3.3 计算阀门移动距离

图4 确定阀门移动方向的Dynamo模型
接下来通过计算得到满足第2节目标的阀门移动距离,其Dynamo模型如图6所示。计算过程需要用到逻辑判断及数学运算,为简化模型,该部分通过2个“Python Script”节点实现。其中,“Python Script 1”的功能已在上一小节阐述,“Python Script 2”的功能则是计算阀门需要移动的距离,其判断逻辑图如图7所示。按此原则,可保证当阀门两端的管线长度之和大于6m时,移动最小的距离以达到其中一段管线长度为6m的目的; 当阀门两端的管线长度之和小于或等于6m时,阀门移到管线的端头(以阀门距端头3mm为例); 当阀门两端的其中一段管线长度刚好为6m时,阀门按设计时的位置不做调整。

图5 阀门移动方向的判断逻辑图

图6 计算阀门移动距离的Dynamo模型
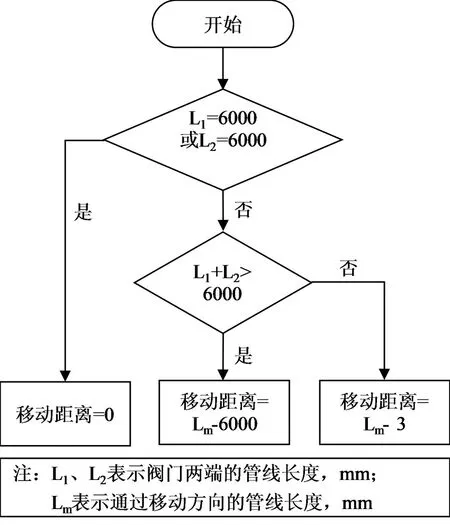
图7 阀门移动距离的判断逻辑图
3.4 通过向量实现阀门移动
确定阀门移动的方向与数量之后,随即利用Dynamo自带节点“Vector.Scale”生成阀门移动的向量,并通过“Element.MoveByVector”实现阀门按指定方向和距离的移动,最终实现阀门的自动定位要求。图8展示了实现阀门移动的Dynamo模型。

图8 实现阀门移动的Dynamo模型
4 多个阀门自动定位
前文论述了单个阀门自动定位的方法和步骤,而在实际工程中,通常不止一个阀门,因此下面阐述多个阀门自动定位的方法。
4.1 Dynamo自定义节点
Dynamo提供了自定义节点的功能,自定义节点经打包后形成.dyf文件,可重复利用,而且稳定性高,不易被误改。将上述单个阀门自动定位的Dynamo模型打包成一个自定义节点“Adjust MEPValves”,该节点的.dyf文件如图9所示。该节点的输入为多个阀门组成编号列表,输出为向量。
4.2 过滤视图中的阀门
为筛选出需要自动定位的阀门,本节通过Dynamo自带的节点过滤图元,其Dynamo模型如图10所示。通过“Select Model Elements”节点自由框选Revit界面中目标阀门附近的图元,此过程选择的图元集合需包含所有的目标阀门。然后通过图元的名称过滤出名称中含有“阀”字的图元,即得到目标阀门的编号列表。
4.3 多个阀门自动定位
选择好待调整的目标阀门后,通过4.1节的自定义节点“Adjust MEPValves”即可实现多个阀门的自动定位。这里需要注意的是,为使多个阀门中的每个阀门都一一进行自动定位,需要在“Adjust MEPValves”节点中使用级别,其使用级别为@L1,如图11所示。通过以上方法即可实现多个阀门的自动定位。

图9 阀门定位的Dynamo自定义节点
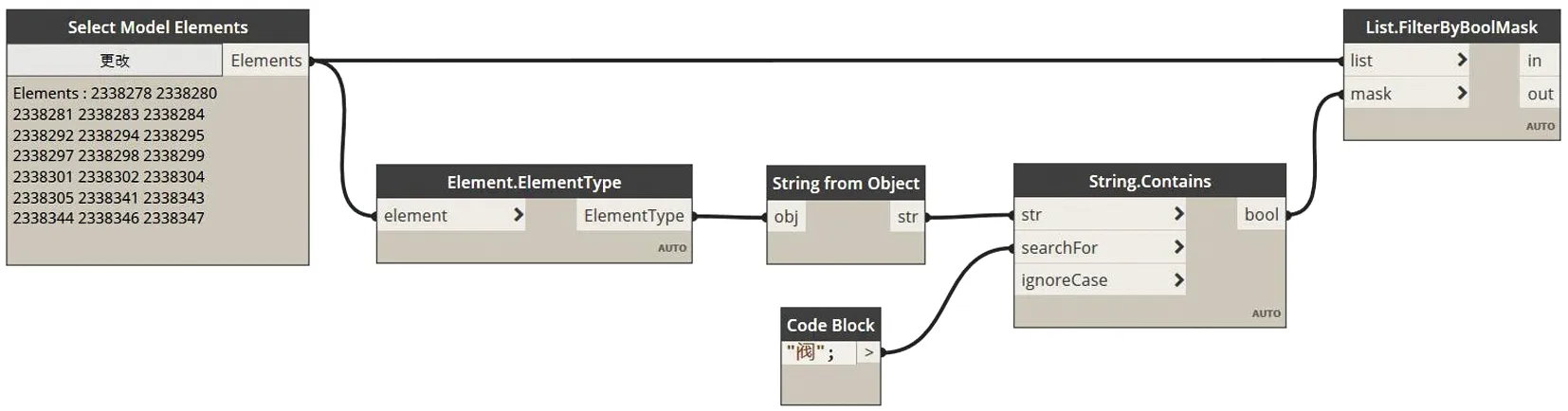
图10 过滤阀门的Dynamo模型

图11 实现多个阀门定位的Dynamo模型
5 试验结果及分析
根据本文提供的阀门自动定位方法,借助Autodesk Revit 2018及Dynamo for Revit 2.0.2平台,对本文图1中示意的各种阀门位置及管线长度进行试验,试验结果如图12所示。由图12可知,对于阀门在水管上的各种位置,本文方法均能实现目标要求。当阀门两端水管长度之和小于或等于6m时,阀门被移动到管线的端头位置,如图12的情形1、情形2所示,对比图1、图12可知,此两种情形下,阀门移动的方向是往短边移动。当阀门两端水管长度之和大于6m时,通过本文方法,保证阀门一侧的管线长度为6m,如图12的情形3、情形4所示。对比图1、图12可知,此两种情形下,通过阀门移动确保原长度接近6m的管道长度为6m。以上阀门自动定位试验结果即满足了最大限度利用6m长原管且尽量减少阀门移动调整量、保持与原设计一致性的目标。

图12 阀门自动定位试验结果
表1展示了阀门调整前后各情形的切管、连管次数对比。由表1可知,对于以上情形1~4,阀门调整后切管次数各减少了1次; 除情形3外,连管次数同样各减少了1次。情形3例外的原因是其阀门两端的管道长度均小于6m,本身无多余的连管工程量。除此之外,其他情形均能减少1次连管工程量。由以上分析可知,本文提出的管道阀门自动定位方法,能一定程度上减少切管、连管工程量,节约管道连接件,降低施工成本。

表1 阀门调整前后各情形切管、连管次数对比
对于某实际工程(某地铁车站的消火栓系统),对管道上的蝶阀使用本文方法进行自动定位,结果如图13所示。在本项目中,共筛选并过滤出24个水平干管上的蝶阀,完成了蝶阀的自动定位。蝶阀调整前后,整个项目的切管与连管次数共减少41次。Dynamo程序运行流畅,未出现任何错误警告。经此实际项目验证可说明,本文提出的基于BIM的管道阀门自动定位方法能准确过滤阀门,实现阀门自动定位的功能,对实际项目来说具备可行性。

图13 阀门自动定位在实际工程中的应用
6 结论
本文主要阐述了基于BIM技术的管道阀门自动定位的实现方法。首先通过分析阀门在管道上的位置,明确实现阀门定位的目标;然后借助Dynamo for Revit的可视化编程功能,逐步实现了Revit中单个阀门及多个阀门的自动定位;最后通过各种不同的阀门位置及管线长度对本方法进行试验,验证了方法的正确性。进一步地,通过某地铁车站消火栓系统的实际工程,验证了本文方法的可行性。
本文所提出的基于BIM技术的管道阀门自动定位的实现方法,简单高效,可一定程度减少切管、连管工程量,降低施工成本,具有较强的现实意义,同时为BIM技术及Dynamo可视化编程在阀门定位方面或其他相关领域中的应用提供了一些借鉴。
