一种适用于电网频率波动的双馈风力发电机并网控制策略
2021-02-10曾德灿黄剑锋
曾德灿,黄剑锋
(惠州学院 电子信息与电气工程学院,广东 惠州 516007)
以双馈风力发电机为主要机型的风电场对电网的系统惯性没有贡献[1],这不利于电力系统的稳定性的维持.GILLIAN L等[2]对爱尔兰国家的局部电网进行了探索,MILLER N W等[3]对美国的公布式微电网进行了探索,郑黎明等[4]通过仿真实验的方式研究了风场占主电网的比重的大小对电网频率稳定影响越大.对于双馈型风力发电机参与电网调频调节主流的有2种研究思路:一是增加系统虚拟惯性,二是储备功率.MORREN J等[5]提出在电网频率变化时改变风力机风轮的转速来提高系统的虚拟惯性.国内关于电网频率波动的双馈风力发电机并网控制的研究尚少,李和明等[6]提出在低风速阶段增加虚拟惯性,间接提高了风力机在低风速阶段并网的频率稳定性.
本文通过引入电网频率变化参数设计虚拟惯性控制环,增加系统虚拟惯性,通过改进转速控制器和桨距控制器使风力机的减载运行,使风场储备功率.通过Matlab/Simulink建立以水电为主风电为辅的两区域两机电力系统模型,验证不同风况下设计的有效性.
1 影响电网频率稳定的因素与传统双馈风力机的控制策略
1.1 影响电网频率稳定的因素
以同步发电机为主的传统电网中频率是维持稳定的[4],其中发电机的转速与电网的功率与负载的关系可表示如下:
其中,J为发电机的转动惯量,ωs为发电机的转速,Pgen表示发电机的向电力系统输送的功率,Pload则为电网总负载,p为同步发电机的极对数.
由式(1)、(2)可知影响电网频率稳定的主要因素有J、Pgen、Pload,同时由电力系统的负载发生突变时将会引起电系统的频率的变化(图1).可以看出负载变化量一定的情况下,系统的转动惯量J越大,频率的变化量就越小,即相对大的系统惯量能够起到稳定系统频率的作用.

图1 电网频率随负载突变产生变化
1.2 传统的双馈风力发电机控制策略
传统的双馈风力发电机的控制策略主要分2个阶段:在额定风速以下阶段,风力发电机保持桨距角不变,通过控制发电机的转速来实现最大风能捕获;在高于额定风速阶段,主要通过调节桨距角,限制风力机获取能量,控制风力发电机的转速和功率,确保风力机功率恒定输出.
其中,低风速阶段典型的速度控制环如图2所示.发电机的转速可以通过由P-ω关系得到,反应了风中处于最大风能捕获时发电机转速的变化规律[7].

图2 转速控制器
当功率在0.75 pu以下时,电机的参考转速的计算公式如下.

当功率高于0.75 pu时,电机的参考转速维持在1.2 pu.
典型的桨距控制环如图3,桨距控制用于限制高于额定风速时风机输出功率的稳定性.

图3 桨距控制器
传统的控制器只是针对单台风机的控制,变速恒频控制的双馈风力发电机使得发电机的转速与电网频率解耦,没有涉及到并网频率的控制,即电网频率的变化将与风机的转速无关,所以传统的控制器不具备频率响应能力.因此,双馈风力发电机的并网对电网的系统的频率稳定性没有贡献.
2 仿真建模与控制策略的改进
2.1 两区域两机电网模型
为研究双馈风力发电机并网对电力系统频率稳定性的影响,利用Matlab/Simulink仿真软件建立了以450 MW水电为主,10台*1.5 MW的双馈风电机组成的风电场为辅的两区域两机电力系统的模型(图4).
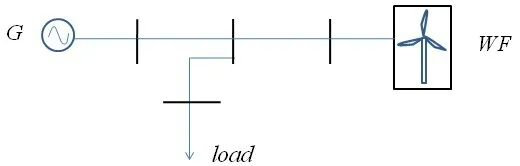
图4 两区域两机模型
2.2 并网型双馈风力机的控制策略改进
传统的并网型双馈风力机的控制策略对系统惯性没有贡献.因此,本文设计了虚拟转矩控制环节(图5),为虚拟惯性控制做好准备.图5中:f为测得电网实时频率,f0为电网工频,LPF为低通滤波器,HPF为高通滤波器,Tinertia为输出的虚拟惯性转矩.
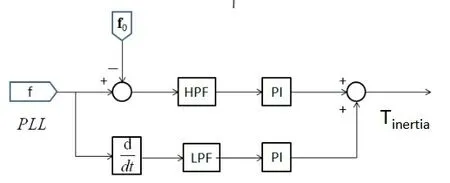
图5 虚拟转矩控制环节
此外,为了储备功率,可通过超速控制设计风力机的减载运行控制环节[4].综合增加虚拟惯性和储备功率的思路设计了改进后的转速控制器(图6),图6虚框内的A为增加了虚拟惯性转矩Tinertia作为输入的虚拟惯性控制环节.虚框B是以超速运设计的减载运行控制环节,p-ω关系图中的虚线为风机减载运行的功率-转速运行曲线,即按最大功率捕获时功率的1-X%运行,则X%为储备能量.
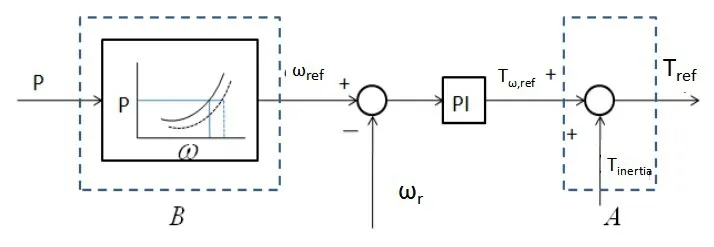
图6 改进后的转速控制器
传统的桨距控制器只在高风速下切入控制,以获得恒定功率的输出.根据文献[4],桨距控制器还可以在任何风速下实现风力的减载运行.风力机减载运行可为风场储备有功功率,根据这一思路对风力机的桨距控制器进行改进(图7),图7虚框C内的减载功率与桨距角的关系,输入为减载X%,即可视为储备能量.f为测得电网实时频率,f0为电网工频,LPF为低通滤波器,即为将电网频率变化参数作为桨距控制的输入.

图7 改进后的桨距控制器
改进后的桨距控制器不再只是运用于额定风速以上,而可以工作于整个运行阶段的用于减载运行控制.当电网频率波动时可通过桨距调节向电网输出有功功率,帮助电网频率的恢复.
3 仿真结果及分析
3.1 低风速下的惯性控制
为验证惯性控制对双馈风机参与电网频率调节的效果,作如下工况下的仿真:
仿真工况:风场风速为8 m/s,水电机组为450 M,风力发电机组150 M,负载为200 M,1~3 s系统增加20 M负载.
仿真结果由图8可知,增加虚拟惯性控制环的转速控制,当频率变化时可以对电网频率提供短暂的支持,频率的最大跌落值提高了0.15 Hz.但是20多处出了小幅度的二次跌落,之后快速回归稳态.

图8 有无惯性控制的仿真结果对比
3.2 低风速下的减载运行控制
减载运行是通过减少风机功率输出,达到能量储备的目的,当频率跌落时启用备用能量,使得频率恢复.
仿真工况:风场风速为8 m/s,水电机组为450 M,风力发电机组150 M,负载为200 M,1~3 s系统增加20 M负载.
仿真结果由图9得知,低风速下的减载运行控制对电网频率下降的最大值起到了抑制的作用.下降的最大值由原来的0.52 Hz,缩小为0.46 Hz.

图9 有无减载运行控制的仿真结果对比
3.3 高风速下混合控制
风机运行于高风速段时,传统的控制方法是调桨控制.本文采用改进后的惯性控制与减载运行控制策略相结合的控制策略.
仿真工况:风场风速为13 m/s,水电机组为450 M,风力发电机组150 M,负载为200 M,1~3 s系统增加20 M负载.
仿真结果由图10可知,传统的单个桨距控制运行的结果是系统频率下降的最大值为0.36 Hz,混合控制运行下的频率下降最大值是0.26 Hz,混合控制的结果更优于传统控制.

图10 有无混合控制策略的仿真结果对比
4 结论
针对双馈风力发电机并网对局部电网的频率稳定没有贡献的情况,本文提出将电网频率变化信息引入传统的转速控制器和桨距控制器,设计虚拟惯性控制环和减载运行控制环,同时对风力机的过程控制进行调整,低风速时选择虚拟惯性控制或者减载运行控制,高风速时则选择混合控制策略.建立两机两区域仿真模型,用于验证所改进的控制策略,由结果分析知,额定风速以下的虚拟惯性控制和减载运行控制,以及额定风速以上的混合控制,均可使双馈风力发电机对电网频率的稳定起到一定的作用.
然而,这2种控制方式都存在着不足的地方,虚拟惯性控制可以在风力机实现在最大风能捕获的情况下为系统提供短暂的功率支持,但风轮的速度变化会引起电网频率的二次跌落,同时转速可能触及转速极限.减载运行控制策略在高低风速下均可使用,但是减载运行将降低风机的效率,以桨距控制实现的减载运行可能引起变桨机构的磨损,影响部件寿命.总得来说,对于风资源丰富且长期工作的风电场而言,牺牲小的风机效率以获得大规模的双馈风力发电机组的并网运行是值得的.后续研究可对风力机的转速控制器与桨距控制器以及全阶段的过程控制进行优化,并进行更多的实地验证,以寻求风电并网控制的最优控制策略.
