基于现代多旋翼无人机的GPS模块创新设计
2021-02-01任俊
任俊
湖南城市学院机械与电气工程学院 湖南 益阳 413000
1 现代多旋翼无人机概述
1.1 背景与意义
UAV(unmanned aerial vehicle)即无人机,无人机是无人驾驶飞行器的一种泛称,无人机实现了无人控制,在飞行时依飞行器的动力装置所获得的升力来抵消飞行器自身的重量,可通过遥控设备或自主飞行来实现复杂的空中飞行任务。在众多的无人机类型中,四旋翼飞行器具有出色的性能,相较于固定翼无人机而言,四旋翼无人机对于起飞条件的要求更低,可实现垂直起降,其机械架构十分加单,具有负载能力强,可实现垂直起飞和降落等优点。由于四旋翼飞行器在飞行控制、结构设计、安装调试等方面的要求较高,因此当前四旋翼飞行器的研究已成为学术界专家学者研究的热点问题之一。世界上首架真正意义上的无人机由美国学者所研发并试飞成功。在20世纪中期,随着自动控制技术和导航技术的逐渐发展,为无人机的出现和研发奠定了基础,同时,多领域的应用需求使其有着无与伦比的发展优势[1]。
1.2 现代多旋翼无人机概述
相较于固定翼无人机而言,多旋翼无人机的优势体现在:操作简单、高的可靠性、容易维修。近年来,随着市场的发展,无人机的运行变得越来越简单,多转子无人机不具有固定翼无人机的静态稳定性,也没有单旋翼直升机旋转特性,无人机飞行控制系统简称无人机飞控系统,这是整个航程过程的核心系统,该系统可以完成整个航程过程中。在四轴飞行器的结构相对简单,体积可以小,操作简单,起飞和降落都方便,而且应用程序的性能在许多方面是良好的。随着科技的飞速发展,微机电系统在最近几年尤其是发展迅速,再加上高速低功耗处理器技术的发展,这为多旋翼无人机的发展提供了重要的技术基础。
2 GPS模块硬件设计
2.1 GPS模块选择
UBLOX_NEO-6M(GPS模块)是一款高性能的GPS模块,灵敏度也很高,优良的性能可以应用于手持机定位,具有灵活性好、定位精度高等诸多优势,在狭窄都市天空下、密集的丛林环境,这些普通GPS接收模块不能定位的地方,模块的高灵敏度、小静态漂移、低功耗及小体积,非常适用于车载、手持设备如PDA,车辆监控、手机、摄像机等移动定位系统的应用。根据官方解决方案设计电路如图1。
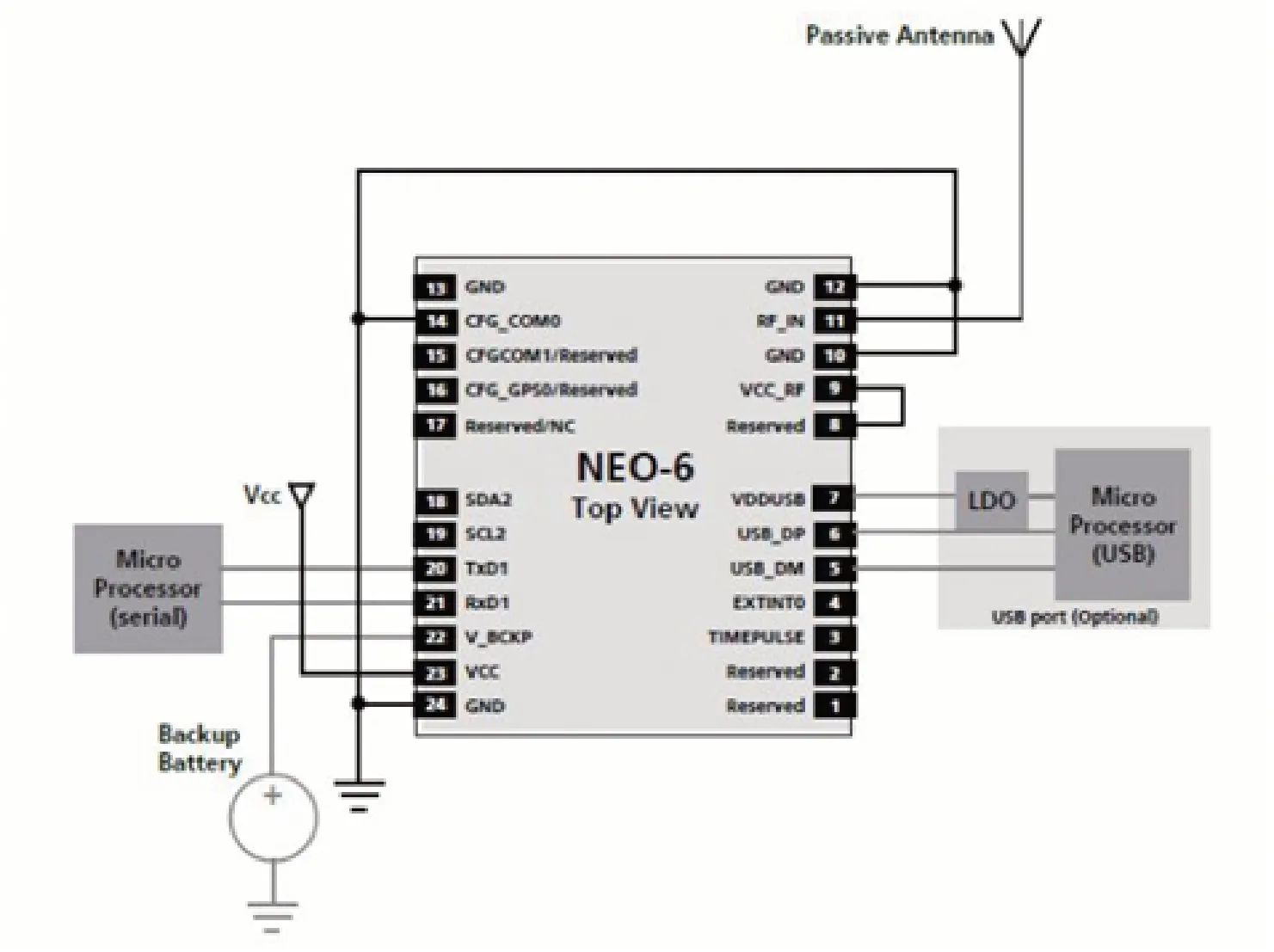
图1 NEO原理图
2.2 接口
(1)UART
u-biox 6具有UART接口(RxD1/TxD1),持波特率4.8~115.2kBit/s,信号电平是0V~VCC,需要有电平转换IC,如MAX3232。
(2)USB
u-biox 6的USB接口可以以12Mbit/s的速率实现传输数据。USB接口需要通过其他元件才能满足数据传输特性要求,为了满足USB规范,VBUS必须通过LDO(U1)将5V的VBUS降为3.3V并连接到VDD_USB脚。若模块自带USB供电设备,则可向USB Host输出信号,但是这种状况在实际中效率较低,数据传输精度不理想,因此应通过VCC-LDO使能信号禁止LDO(U1)。按照LDO(U1)的特性,可在输出端外接下拉电阻保证VDD_USB不会浮空。若模块采用总线供电方式则LDO(U1)无须进行使能控制。
(3)显示数据通道(DDC)
在NEO-6模块中,存在被用于作为一个现实数据信道接口(DDC)的串行通信的I2C接口。u-biox 6接收器以I2C运行。仅当外部EEPROM用作存储配置时才支持主模式,以及用于检测这种非断电易失性存储器组件的存在的读取操作。为了u-blox 6,读DDC内部寄存器地址为OxFF(信息发送缓冲区)的情况下,主机不能访问每个字节之前设置的读出地址。由于内部寄存器的地址是由1从寄存器读取为OxFF每个字节,然后在饱和后为OxFF递增。仅用于连接外部EEPROM,内置的上拉电阻足够大。
(4)SPI
u-biox6 NEO模块有SPI接口,SPI可以连接外部设备,如FLASH存储器、A/D转换器或与HOST CPU连接。
2.3 硬件主要器件选型
(1)主控制器
控制系统中最重要的就是主控制器,它控制所有的模块正常运转,同时也承担信号处理等任务,如信号采集和处理、无人机姿态控制等。因此本文选择STM32F405R微控制器[2]。STM32F405R采用了90nm的NVM工艺和ART,工作频率高,运算速度快,此外,其通信接口也十分丰富,当CPU在允许频率范围内工作时具有良好的零等待周期性能。除此之外STM32F405R接口十分丰富。由此可知选择STM32F405R可满足本文需求[3]。如图2所示。
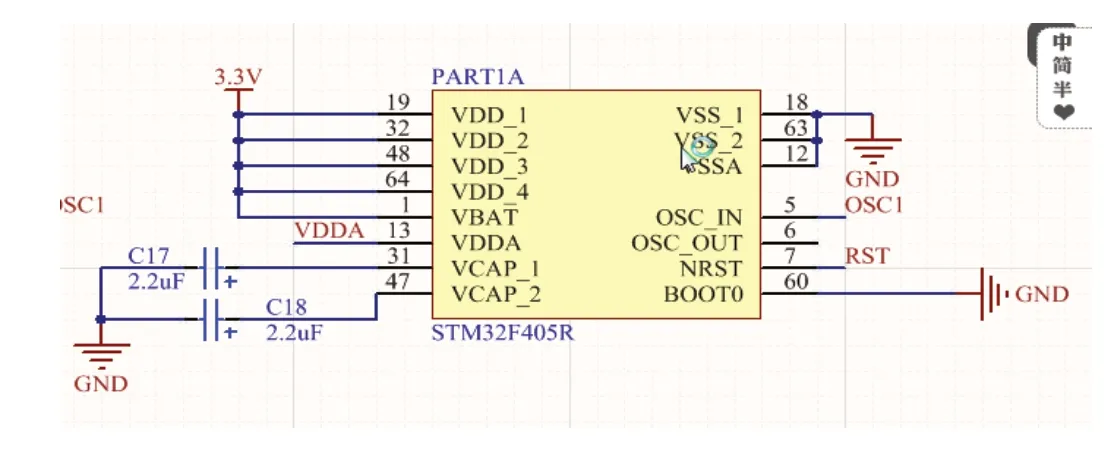
图2 主控制器原理图
(2)传感器
微型UAV系统中的传感器的选择必须考虑多种因素,例如尺寸,重量,功耗和成本。在设计中,GPS接收器选择NEO-7M。 的NEO-7M GPS模块是一种低功耗,高灵敏度,全功能的超小型外部GPS接收器模块。
(3)磁强计数据采集
HMC5983是一个温度补偿的三轴集成电子罗盘,内置高分辨的HMC118X系列的磁阻传感器,除此之外还有放大器等,该磁强计数据采集设备航向角为1-2度[4]。I2C个SPI串行通信总线,表面有多个引脚贴片封装。HMC5983利用了AMR技术,在地磁场传感器中具有良好的灵敏度和可靠性。如图3所示。
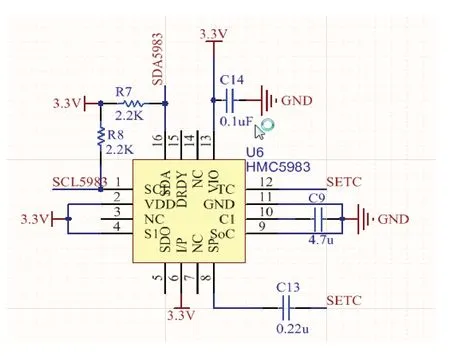
图3 强磁传感器
(4)CAN总线通信硬件
所述TJA1050设计有先进的硅绝缘体上SOI技术和最新的EMC技术,所以TJA1050具有优异的EMC性能[5]。该TJA1050T具有用于选择,高速模式和静音模式的两种操作模式。对于CAN收发器而言,正常模式是用于正常的CAN通讯。从TXD输入的数字位流,可转换为相应的模拟总线信号,与此同时,监控总线可将模拟总线信号转换为对应的数字位流,并在RXD引脚完成输出[6]。TJA1050T正常工作在高速模式,TJA1050 提供一个专用的静音模式,这个模式中发送器完全禁能。这样就保证了没有信号能够从TXD引脚发送到CAN总线上,像TJA1040在待机模式一样,这个静音模式可以建立一个Babbling Idiot保护[7]。如图4所示。
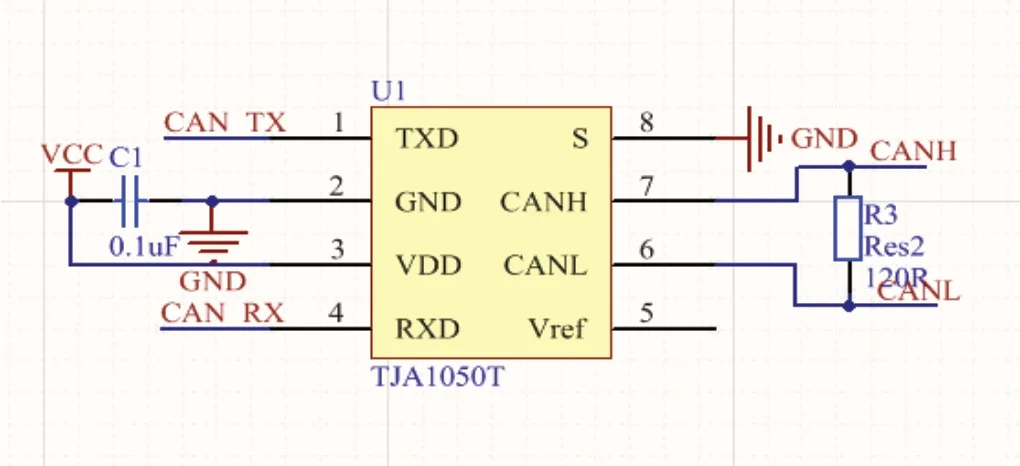
图4 CAN总线原理图
(5)GPS 电路设计
设计的GPS电路使用ATK-NEO-6M模块。ATK-NEO-6M是一款高性能ALLENTEK GPS模块,其核心使用U-BLOX的NEO-6M模块[8]。GPS模块可以通过串口连接到外部设备,该接口具有兼容5V和3.3V嵌入式微处理器系统的TTL 电平。其定位精度可高达3.6m CEP,最大更新速率为6Hz,最大捕获跟踪灵敏度可达-159d Bm[9]。内部核心结构图如图5所示。
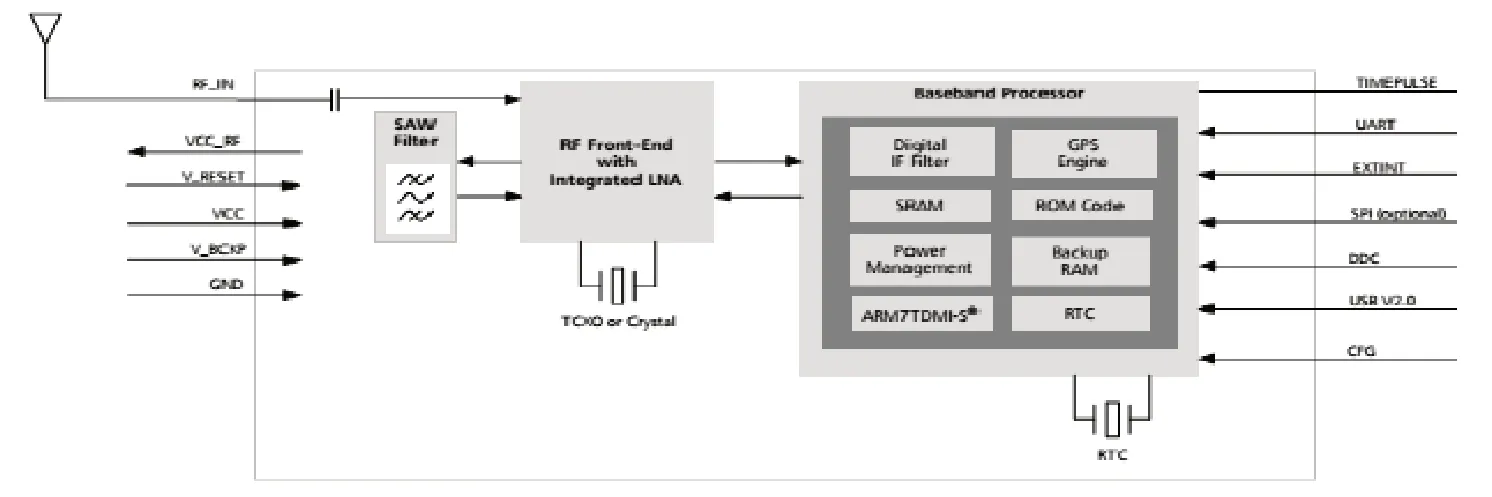
图5 GPS内部核心结构图
GPS电路的设计采用外部EEPROM的设计。由于GPS通常需要在每次电源接通时,为了避免这个时间被接通,当操作模式被每次设定,外部EEPROM(U10)通过设计用于测试的GPS电路使用。在EEPROM已经设置模式下操作的GPS可直接读取,并与工作需要模式是复位,省去了烦琐的初始化过程,为了保证GPS工作的稳定性。
2.4 PCB布线
通过上述的理论和原理的了解,最后制作合理的GPS模块PCB板。PCB板布线图如图6。
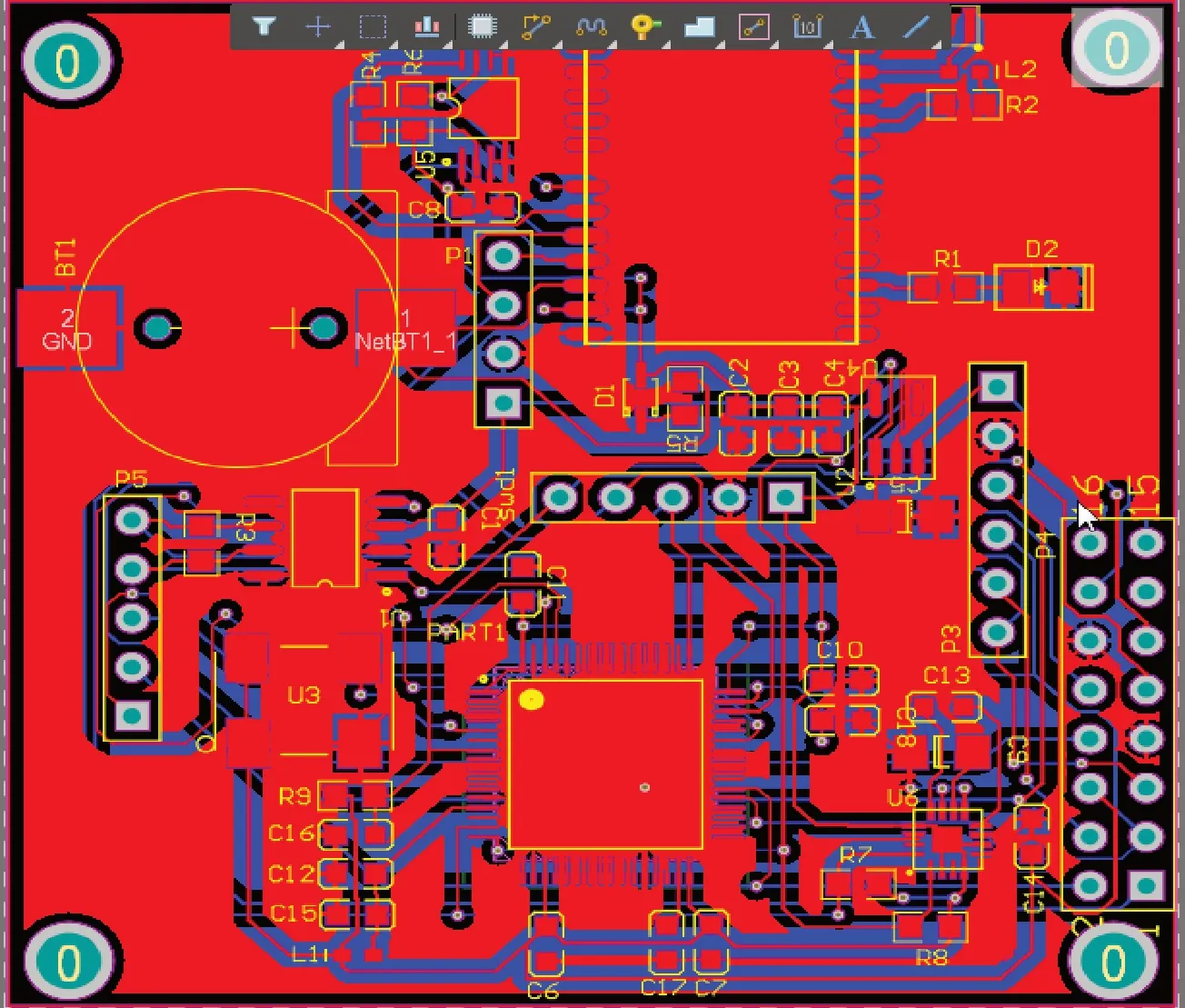
图6 GPS模块PCB布线图
3 结束语
随着科技的飞速发展,GPS模块系统在最近几年发展尤其迅速。再加上高速低功耗处理器技术的发展,这为多旋翼无人机的发展提供了重要的技术基础。此外,该功能的应用空间非常广阔。但是目前使用的GPS导航模式还太单一,在多干扰和远距离等复杂环境下还显无力。我们相信随着科技的进一步发展,无人机技术会日益成熟,设计模式也会更加多元化,同时也会更加方便我们的生活。
