适用于物联网课程教学的自动升降型鲍鱼养殖平台设计
2021-01-26邢博闻李月冯江伟
邢博闻,李月,冯江伟
(上海海洋大学工程学院,上海 201306)
鲍鱼作为一种商品化的高端水产品,其肉质爽脆柔滑,肉味清香鲜美,具有很高的营养价值。目前,我国鲍鱼年产量全球占比高达90%以上,中国是世界第一产鲍大国,鲍鱼养殖业已成为中国水产行业重要经济支柱之一[1]。常规的养殖方法包括工厂化养殖、挖渠养殖及海水养殖3 种,因海水养殖可实现养殖规模广、成活率高、生长率高等目标,故被广泛应用于我国沿海水域。然而,人工养殖鲍鱼大多为近海沉箱养殖[2],每次投饵均需要人工把网箱从海水中一组一组拖出,分别进行投喂,工作量十分巨大,浪费大量人力、物力资源。由于人的力量有限,这也就决定了单组网箱的个数十分有限,从而影响鲍鱼养殖的整体数量,使单位体积海域的综合利用率不高,难以满足高效的鲍鱼养殖需求,造成海洋资源的浪费。
随着水产养殖业的发展,鲍鱼养殖业在海域利用竞争中处于劣势,海上适养空间越来越小,而鲍鱼自身的生态特点又使得新的养殖空间尤其是外海空间的拓展非常艰难,故提高海域养殖区域的利用率成为解决养殖区域不足的关键。然而传统鲍鱼养殖中存在难以解决的高深度[3]和高密度养殖的问题,导致养殖效率低,可利用海洋养殖区域资源逐渐减少。为此,如何在网箱提升过程使用自动化设备替代人工作业,并实现高密度养殖,提升海洋资源综合利用率成为了一个亟待解决的问题。
针对沉箱养殖造成的工作效率低、人力资源浪费、单位体积海域的综合利用效率低等问题,提出一种自动升降型鲍鱼养殖平台,利用简单的机械结构及控制系统原理等,实现网箱的自动升降。为实现上述目标,提出的鲍鱼养殖平台设置有养殖支架结构、升降控制系统及主控系统,且设有太阳能板、控制器、增氧机,实现太阳能供电、自动控制养殖网箱升降、实时供氧,充分利用海域养殖空间资源[4],实现自动控制,减少人力资源浪费,最终实现鲍鱼的多网箱高深度高密度养殖。
1 系统构成
1.1 系统结构
自动升降型鲍鱼养殖平台结构如图1 所示,包括支架1、浮体2、网箱组3、步进电机4 和平台控制器5。支架1 固定安装在浮体2 两侧,且支架1 截面为三角形结构,网箱组3 设置在浮体2 上表面,网箱组3 上设有网箱盖6,浮体2 表面设有作业通道7,且设有增氧机15 以及太阳能电池板17,增氧机15 通过输氧管16 连通网箱组3,太阳能电池板17固定安装在浮体2 一侧,两个支架1 顶部之间安装有转轴8,转轴8 上安装有两组链轮9,转轴8 一端连接步进电机4,另一端连接变速箱10,手动控制摇轮18 连接于变速箱10,步进电机4 连接平台控制器5,平台控制器5 连接主控系统11,步进电机4通过电缆线12 连接电源13,电源13 上固定设有紧急停电按钮14。
其中,平台控制器结构5 上设置有上升控制键、下降控制键和停止键,在日常对鲍鱼进行投喂或收获等工作时,工作人员只需按下平台控制器上的上升控制键或下降控制键,网箱组在链轮的带动下即可实现相应的上升或下降运动。当网箱组运动到所需工作高度时,工作人员只需再按下停止键,网箱即可停止到当前位置。
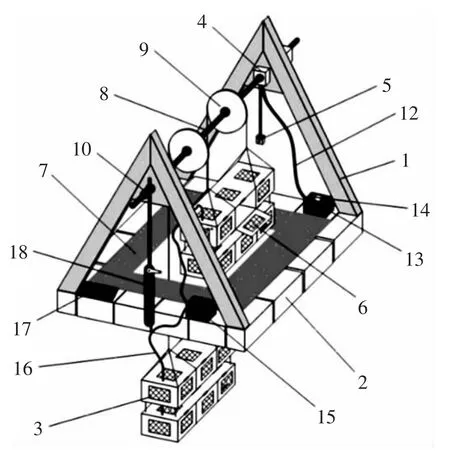
图1 自动升降型鲍鱼养殖平台整体结构图
1.2 工作原理
饲养人员在作业通道上对鲍鱼进行投喂或收获等工作时,只需按下控制器面板上的UP 键或DOWN 键,网箱组在链轮的带动下即可实现相应的上升或下降运动,当网箱组运动到所需工作高度时,工作人员只需再按下STOP 键,网箱即可停止到当前位置,从而便于进行人工投喂或收获工作。网箱盖可从外侧打开,便于工作人员在作业通道上对鲍鱼开展投喂或收获等工作。其中,控制器可以为有线控制,线路为螺旋式弹性导线,当导线全部被拉直时,其长度刚好到达作业通道的最远位置。当平台控制器发出升降指令后,由主控系统进行采集并汇总,当所有条件均具备时,主控系统以脉冲的方式传递给步进电机,步进电机接收到信号后就会做出相应的正反转运动。电机输出的转矩经变速箱传递给转轴,转轴带动链轮做旋转运动,鲍鱼网箱在链条的拉动下即可在工作位以上和工作位以下区间执行升降命令。
控制系统中设置的手动控制摇轮连接变速箱,在意外停电或因突发状况通过紧急停电按钮对平台进行断电后,工作人员仍可通过摇动手动摇轮驱动变速箱带动鲍鱼网箱执行升降操作,保障升降系统正常运行。
浮体表面设置有增氧机,增氧机通过输氧管连通网箱组,采用此结构,能够实现对水下网箱进行实时供氧[5],实现鲍鱼的多网箱高密度养殖。固定安装在浮体一侧的太阳能电池板,为整个装置提供电源,从而能够大大地节省电能。
2 控制系统
自动升降型鲍鱼养殖平台搭载的主控系统,根据控制原理,利用简单的控制系统,实现对多网箱高度位置的判断,并提供脉冲信号控制电机的运转,实现对鲍鱼养殖网箱的升降控制,减轻人力劳动,实现高深度的多网箱分布格局,从而提高单位体积海洋利用率,最终实现高效率养殖目标。自动升降型鲍鱼养殖平台的控制系统如图2 所示,其操作流程如下:
(1)操作人员操控平台控制器发出升降指令,该指令包括上升、下降或停止;完成后进入步骤(2);
(2)主控系统检测供电条件是否具备,若具备,完成后进入步骤(3),否则进入步骤(7);
(3)供电条件具备后,主控系统发出相应的脉冲信号,控制电机完成对应的正反转运行,完成后进入步骤(4);
(4)主控系统判断逻辑位置是否正确,该逻辑位置包括工作面以上和工作面以下的每一层网箱位置;若已到达预定位置,完成后进入步骤(5);
(5)当逻辑位置正确,鲍鱼网箱运行到预定位置后,进行刹车,整个平台停止运行,完成后进入步骤(6);
(6)平台运行结束,工作人员进行投喂或收获等工作;
(7)若供电条件不具备,平台无法进行电路控制,工作人员摇动手动控制摇轮对平台进行机械驱动,完成后进入步骤(8);
(8)工作人员判断逻辑位置是否正确,该逻辑位置包括工作面以上和工作面以下的每一层网箱位置;若已到达预定位置,完成后进入步骤(5),否则返回步骤(7)。
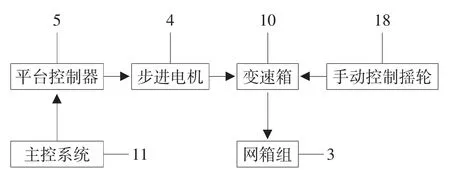
图2 控制系统操作流程图
3 结语
综上所述,该文涉及的自动升降型鲍鱼养殖平台具有结构原理简单、操作方便的特点。所介绍的自动升降型鲍鱼养殖平台的工作流程及其控制方式,能够节省大量人力、物力资源,高效合理地利用单位体积的海洋养殖区域,提高鲍鱼的养殖效率。相对于传统的养殖方式,此种养殖方式可实现对多网箱的升降控制,达到最优质的控制效果,解决了传统鲍鱼养殖中难以实现高深度和高密度养殖的问题。
