超音速目标的多普勒信号处理算法研究
2021-01-21张小东
张小东
(中国电子科技集团公司第二十研究所 西安 710068)
0 引言
随着现代战争中越来越多超音速甚至n倍音速的多种类型飞机、导弹应用普及,如何快速且准确地从各种复杂环境中提取超音速目标的运动轨迹信息,并进行实时精确跟踪,一直是火控雷达的研究方向及不断优化的原动力。本文主要讨论基于脉冲多普勒火控跟踪雷达,实现超音速目标速度的精确测量和跟踪的问题。
1 算法设计
1.1 目标的多普勒频率
对于脉冲多普勒雷达而言,当雷达与目标之间存在相对运动时,回波信号会因多普勒效应使其频率与发射信号的载波频率不同。雷达发射电磁波信号后,如果遇到一个朝着雷达运动的目标,由于多普勒效应,这个目标返回的电磁波信号频率将高于雷达的发射频率,因此,雷达接收到的是更高频率的电磁波。
雷达发射信号与回波信号的相位变化关系为
(1)
其中R(t)表示雷达与目标相对运动的单程距离,它是随时间变化的函数;λ为雷达信号波长。当运动目标以速度V向着静止的雷达作匀速运动时,则R(t)=Vt,于是式(1)可写成
(2)
(3)
fd就是由目标运动所产生的多普勒频率。当雷达信号波长一定时,多普勒频率正比于目标与雷达之间的相对速度。利用目标与雷达之间的相对运动而产生的这种多普勒效应,可以实现对目标运动速度的提取[4]。
本文讨论通过多普勒频率实现目标速度的提取和跟踪。为了测量超音速目标的速度V,可通过对接收到的目标回波(时域信号)进行频域变换,测量出目标的多普勒频率。
1.2 窄带滤波器设计
当目标速度未知时,必须采用窄带滤波器组来覆盖目标可能出现的多普勒频率范围。在实际工程中,设计窄带滤波器组的主要任务是要雷达能够对回波信号进行实时频谱分析。因此,可以通过快速傅里叶变换(FFT)实现窄带滤波器组,对目标回波数据进行频率分析,实时检测出目标的多普勒频率。在理想情况下,如果存在一个速度为V(其多普勒频率为fd)的目标,则频域分析结果如图1所示,通过比对各个滤波器的输出,可以提取出目标的多普勒频率fd。
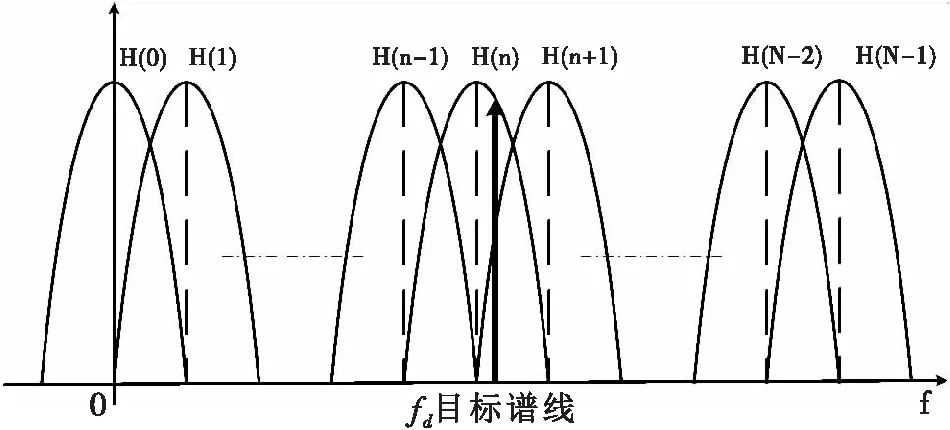
图1 窄带滤波器组
利用FFT形成的窄带滤波器组,可滤除大部分噪声干扰,提高信噪比,检测出超音速目标信号。通常采用连续采集N个重频下的目标回波数据,通过N点FFT算法,可以对回波的多普勒频率进行分析,从而检测出目标的多普勒频率。但是,由于各个滤波器存在旁瓣,它们会影响到相邻的滤波器。通常最高旁瓣(第一旁瓣)电平只比主瓣低约13dB,在实际应用中,为了抑制旁瓣,防止滤波器旁瓣之间的相互干扰,可以采用加窗技术来抑制旁瓣[2]。为了尽可能地提高目标频率响应的主副瓣比,避免主瓣过于展宽,同时有效抑制杂波干扰,本文选用汉明窗函数对回波信号进行加窗处理,这样可使滤波器的第一旁瓣电平降至-32dB,旁瓣衰减速率为每倍频程18dB,可很好地抑制旁瓣对高速目标的影响,同时能提高雷达系统的改善因子。
汉明窗函数表达式为
(4)
窄带滤波器组是要覆盖全部所要探测的目标多普勒频率范围,相邻窄带滤波器之间互相重叠(参见图1)。利用N点的快速傅里叶变换(FFT)可以产生N个窄带滤波器组[6],实现对多普勒频率的检测,但其分辨率为Fr/N,其中,Fr为脉冲多普勒雷达的发射重复频率。
1.3 多普勒频率的提取
为了对超音速目标的速度进行检测与跟踪,需要采用高重复频率。而高重复频率使得窄带滤波器组所获得的分辨率降低。为了提高测频精度,就要求降低窄带滤波器的通带,也就是增大FFT的点数,这时会带来积累时间长,运算量大,很难满足实时处理的要求。在FFT处理点数有限的情况下,为了提高测频精度,论文提出了比值修正的方法,在FFT点数一定的前提下可以大幅提高目标多普勒频率的测量精度。
1.3.1 多普勒频率测量
当雷达系统的采样频率为Fr, 目标回波信号FFT积累点数为N,则每个窄带滤波器的带宽为
Δfr=Fr/N
(5)
目标回波信号经过N点FFT窄带滤波处理,通过对其幅度响应的比对选大,可得到输出最大的滤波器号n(参见图1)。这时通过滤波器号就可以计算出目标多普勒频率fd1为
fd1=n·Δfr
(6)
要更加精确测量,就应该增加滤波器组的个数,例如,当重复频率为128kHz,要达到100Hz的测频精度,则应将FFT的点数增加到1280点,这样积累时间太长,不能满足实时性的要求。因此提高测频精度需要另辟捷径。
1.3.2 多普勒频率修正
本文提出一种可以提高多普勒频率测量精度的比值修正方法,在确定信号输出最大的滤波器后,通过对比相邻滤波器的输出幅值,计算出真实目标的多普勒频率与所选滤波器中心位置的频率之差fd2,这样就可以对多普勒频率测量值fd1进行修正,大幅提高测频精度。
在滤波器组中,理想中的每个滤波器的幅频响应特性曲线形状是完全相同的,可以通过比较相邻滤波器幅值的方法,实现fd的精确测量。
图2为相邻的三个滤波器,以其为例来阐述比值修正的方法。如果以128kHz的重频频率和64点FFT滤波器为例,fd的测量精度只有2000Hz。如果将OA区域分成50等分,就可以将fd的测频精度提高到20Hz。
如果fd处于滤波器n和滤波器n+1之间,并且,滤波器n的输出幅值最大,那么,多普勒频率fd应该处于(OA)之间。相邻两个滤波器最大幅值点相距Δfr,而A点为两个滤波器的交点,因此OA内占据Δfr/2频率范围。由于相邻滤波器在OA范围内的响应是单调的,因此其输出幅值之比也是单调的。
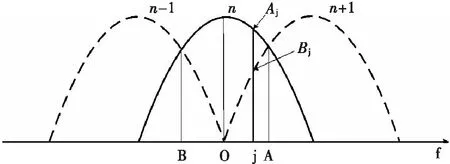
图2 比值修正方法示意图
可以将图2中的OA区域进行若干等分,如M等分(上例中,M=50),则每一等分的频率为
Δf=Δfr/(2M)
(7)
这时,可以根据理想的滤波器响应曲线,计算出OA之间M等分各点的两个滤波器的响应幅值Aj和Bj,并计算出它们的比值Cj为
Cj=Aj/Bj(j=0,1,…,M)
(8)
在比值Cj与对应的等分数j之间建立一一对应数值关系,存入一数据表Revl-Table中,这个数据表为单调的,其单调性如图3所示。
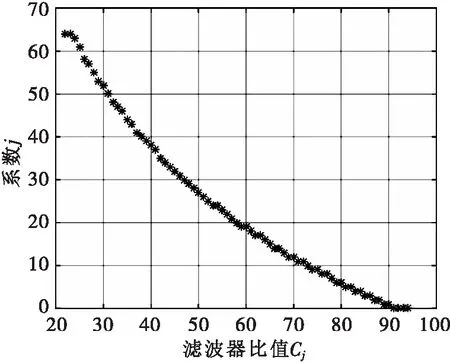
图3 Rev1-Table系数示意图
通过计算邻近两个滤波器的比值Cj查询存储Revl-Table对应的j值,即可得到精确的多普勒频率的修正值fd2为
fd2=j·Δf
(9)
在实际使用时,如果多普勒频率fd处于OA之间,需要计算出n和n+1号两相邻滤波器的幅值比值,通过比对Revl-Table查找出对应的等分值j,利用公式(9)可获得多普勒频率比值修正量fd2,这样就可以得到目标的多普勒频率fd为
fd=fd1+fd2
(10)
如果fd处于滤波器n-1和滤波器n之间,并且,滤波器n的输出幅值最大,那么,多普勒频率fd应该处于(OB)之间。只需要计算出n和n-1号两相邻滤波器的幅值比值,通过比对Revl-Table查找出对应的等分值j,利用公式(9)获得fd的修正值fd2,这样就可以得到目标的多普勒频率fd为
fd=fd1-fd2
(11)
通过利用多普勒频率,可以进一步得到速度值为Vm=fd·λ/2。
1.4 平滑滤波
由于雷达测量取得的数据含有测量误差和噪声,可通过滤波得到准确的目标运动状态的参数。在跟踪雷达系统中,由于被测目标在飞行中存在着加速度,一阶滤波系统不足以对此作出快速反应,会导致跟踪速度误差大。因此本文采用了二阶系统α-β滤波,通过平滑不仅可以进一步提高测频精度,而且可以确保滤波系统的稳定[5]。α-β滤波方程如式(10)所示。
(10)
其中:TA为处理时间,Ve为速度估值,Vp为速度预测值,Ve为加速度估值,Vm为速度测量值。
在刚开始截获目标时,由于估值误差比较大,选用较大的α、β值,以便能较快地跟踪上目标速度。
2 仿真结果
根据上一章节的算法思想,使用Matlab进行相关程序编写并仿真[1]。仿真中,模拟了对速度为845m/s的目标实现快速稳定的速度滤波及跟踪。重复频率设定为PRF=128kHz,即T=1/128ms。仿真使用的模拟输入回波信号为
RN(n)=A(cos(2×pi×f×n×T)+j×sin(2×pi×f×n×T))+B(randn(1,N)+j×randn(1,N))
(11)
式(11)中各部分的含义:
第一部分:模拟目标回波的输入信号,其速度为845m/s;
第二部分:使用Matlab中的randn函数模拟回波信号中的高斯白噪声[3];
A表示信号强度,B表示噪声强度。
n表示从0到N-1组模拟回波数据积累,N=64为进行FFT的点数。
基于脉冲多普勒跟踪雷达针对超音速目标的信号处理算法流程图如图3所示,模拟回波输入信号加入汉明窗后,完成64点FFT,根据目标指示速度值获取所需滤波器组,并对滤波器组选大得到多普勒频率fd1,再通过比值修正得到频率修正量±fd2,最终得到更精确的多普勒频率fd=fd1±fd2,经公式(3)计算速度测量值Vm,利用α-β滤波算法得到目标的精确速度。
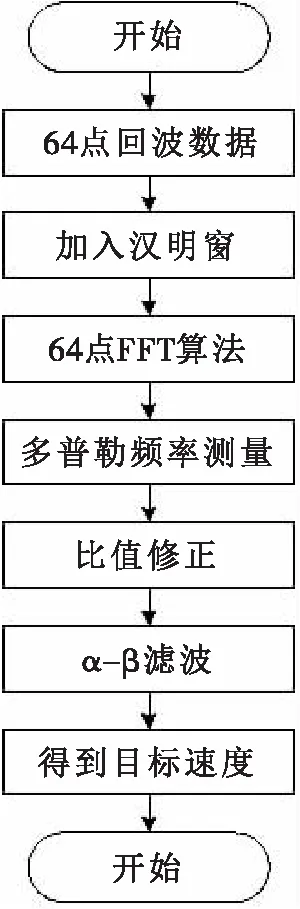
图4 算法流程图注:为了考察本算法对目标速度跟踪收敛的响应时间快慢,故在仿真目标开始时将指示速度值偏移真实速度50m/s,即目标指示速度为795m/s;同时为了考察本算法对于机动飞行目标跟踪的稳健性,仿真过程中加入了速度阶跃值:Δv=10m/s。仿真结果曲线图中:横轴为算法循环次数;纵轴为速度值。实线表示目标真实速度值,虚线表示利用论文算法仿真速度值。
仿真一:模拟目标运动方式为匀速时,仅通过FFT滤波器组测量fd1,计算得到的目标速度如图5所示;在通过FFT滤波器组测量fd1的基础上,增加比值修正方法测量误差修正量fd2,计算得到的目标速度如图6所示。
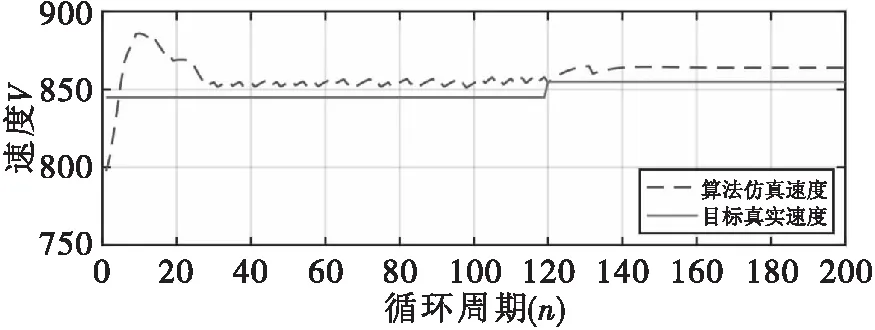
图5 多普勒频率测量得到的速度曲线

图6 多普勒频率比值修正后得到的速度曲线
仿真二:模拟目标运动方式为匀加速时,加速度a=500m/s2。仅通过FFT滤波器组测量fd1,计算得到的目标速度如图7所示;在通过FFT滤波器组测量fd1的基础上,增加比值修正方法测量误差修正量fd2,计算得到的目标速度如图8所示。
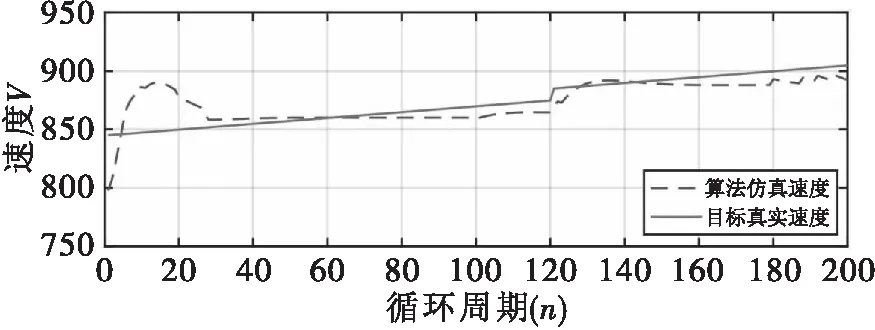
图7 多普勒频率测量得到的速度曲线
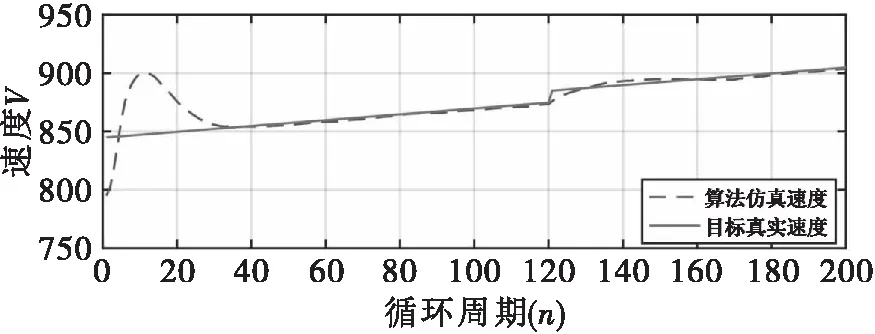
图8 多普勒频率比例修正后得到的速度曲线
比较图5、图7和图6、图8可以看出,只通过多普勒频率测量所得到的目标速度稳态误差较大;通过多普勒频率测量并加入比值修正后得到的目标速度,可以很快稳定跟踪目标的真实速度,而且稳态误差也很小。因此,本算法对于各种姿态飞行的目标都有很好的测量和跟踪效果。
3 结束语
本文主要介绍并仿真了基于脉冲多普勒雷达原理针对超音速目标测速跟踪的一种典型算法。随着各类型更快、更小的飞机、导弹等武器装备的服役与发展,对于火控跟踪雷达提出了更大的挑战。之后需要进一步研究不同捷径、更小回波及复杂的电磁干扰等各种特殊情况共同存在的条件下,对超音速目标如何进行精确稳定的测速跟踪。
