机械扫描雷达的扇形扫描非均匀采样问题的研究
2021-01-21李萌王昊
李 萌 王 昊
(1.西安长远电子工程有限责任公司 西安 710100; 2.南京理工大学 南京 210094)
0 引言
机械扫描雷达的波束扫描是通过天线所在平台的转动来实现的。扇形扫描指的是天线波束在一定的扇区范围内进行往复运动[1]。扇形扫描只针对某一个特定的区域进行来回扫描,扇区范围可调,且数据率高,因此,适合对特定感兴趣的目标和机动性较强的目标进行探测。由于扇形扫描一个周期内能够采到同一个目标的两次点迹数据,该目标的方位角度与扫描中心的间隔和扫描方向决定了下一次探测到同一个目标的时间间隔,因此同一目标相邻点迹之间采样时间间隔不同,这使得滤波和预测都是在非均匀采样间隔的条件下进行的。若不能妥善解决扇形扫描的非均匀采样问题,则会出现目标易丢失、精度低等问题。本文针对机械扫描雷达扇形扫描非均匀采样问题,提出两种解决方法:一是将非均匀采样转化为两路均匀采样并行处理,并通过Hough变换对两路均匀采样的数据进行航迹融合;二是对扇区进行分割,分析计算天线扫描方向不同时不同位置的采样时间间隔,根据目标所处的扇区位置和扫描方向,近似得到目标的预测时间,从而修正滤波和外推的方程,解决非均匀采样的问题。
1 非均匀采样问题的解决
1.1 基于Hough变换的航迹融合方法
由于天线波束相邻两次从同一个方向扫描过一个目标的间隔时间仍然近似为常数,如图1所示,即T=Δt1,k+Δt2,k,而且T就等于此时天线扇形扫描的周期[2]。利用这一特点,将扇形扫描情况下的目标采样非均匀问题分解为两路并行的均匀采样问题,然后通过Hough变换对两路均匀采样的数据进行航迹融合输出[3]。
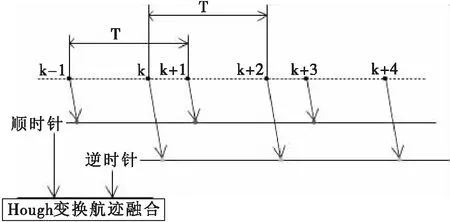
图1 基于Hough变换的扇形扫描航迹融合框架图
如图1所示,将目标的点迹根据天线的扫描方向不同分为两组,此时天线顺时针掠过的两个点迹之间的间隔时间近似为常数T,同样,天线逆时针掠过的两个点迹之间的间隔时间也近似为常数T。这样就将非均匀采样转化为了两路并行的均匀采样。若存在航迹,则将两路形成的航迹输入到航迹融合层,对两路航迹进行Hough变换航迹融合。
Hough变换航迹融合的方法如下所示:
Hough变换法[4]是通过式(1)将直角坐标系的观测数据(x,y)变换到参数空间中的坐标(ρ,θ),即
ρ=xcosθ+ysinθ
(1)
其中,θ∈[0,180°]。即直角坐标系中的一条直线可以通过从原点到这条直线的距离ρ和ρ与x轴的夹角θ来确定。
为了更好地判断两条航迹的相似性,将ρ-θ平面离散地分割成若干各小方格,通过检测3-D直方图中的峰值来判断公共地交点。直方图中每个方格的中心为
(2)
(3)
其中,Δθ=π/Nθ,Nθ为参数θ的分割段数;Δρ=L/Nρ,Nρ为参数ρ的分割段数,L为雷达测量范围的2倍。
假设两路并行的均匀采样各产生了一条航迹,分别为航迹1和航迹2,航迹1和航迹2中的点迹数量分别为N1和N2。若两条航迹是由同一个目标产生的,那么航迹1和航迹2中的所有点迹经过Hough变换后,得到的ρ和θ的值在某一个区域内有峰值,峰值的个数接近或等于两个航迹中点迹之和N1+N2。若两条航迹不是由同一个目标产生的,那么ρ和θ的值则会在两个不同的区域取得峰值,其中一个为航迹1中的点迹产生的,峰值接近或等于N1,另一个为航迹2中的点迹产生,峰值接近或等于N2。
同时为了保证航迹融合的准确性,还需要在距离和速度等方面加上相似的门限进行判断。
1.2 基于扇区分割的目标预测时间计算方法
由于在扇形扫描过程中,天线所在平台(下述转台)的速度不是恒定的,所以如果直接用天线扫描过的角度与转台转速相比,求相邻两次扫描的预测时间是不准确的[5],因此,提出通过记录过同一个角度的转台时间来得到相邻两次扫描的预测时间的方法。该方法主要通过将扇区划分为小扇区,先通过转台的扇形扫描运动计算好每个小扇区边界在转台顺时针转过和逆时针转过时的预测时间,然后再判断点迹距离哪个小扇区边界近,通过查找对应的小扇区边界的预测时间得到点迹的预测时间。对应的扇区分割图如下所示。
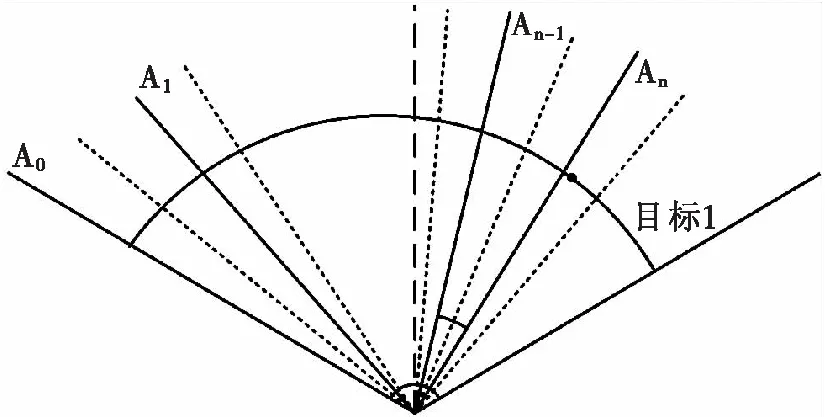
图2 扇区分割图
设雷达方位向的分辨率为θ,雷达的扇形扫描范围是φ,则可以用N=floor(φ/θ)个分割线将扇区划分为N+1个小扇区,转台当前的方位角度为A(tnow),转台上一个时刻的方位角度为A(tlast),扫描方向为f,其中

(4)
则时间间隔的计算过程如下:
1)雷达开始工作时开始计时,当前帧的时间为tnow,前一帧的时间为tlast;
2)共N个扇区分割线,每个扇区分割线的方位角度记为An(n=1,…,N),An=α+n·θ,起始角度A0=α,终止角度AN+1=β,in(n=1,…,N)为每个扇区分割线记录的时间个数;
3)遍历所有的扇区分割线的方位角度An(n=1,…,N),执行步骤4;
4)判断in≤Ntotal,若成立,则进行步骤5,若不成立,则进行步骤7;Ntotal为每个扇区分割线记录的时间总数,Ntotal为大于2的奇数,Ntotal越大,最后求得的每个扇区分割线的时间间隔越准确,需要进行的准备时间越长,这里取Ntotal=11;
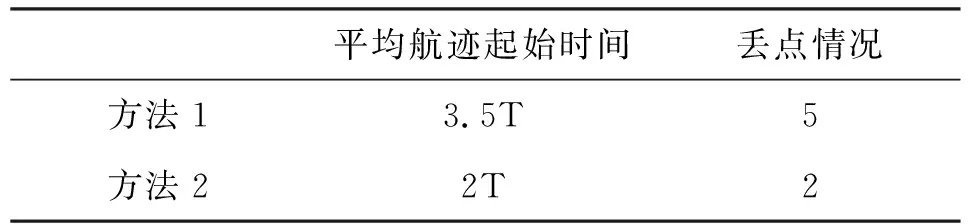
5)若f·A(tlast) 6)若-f·A(tlast)≥An,-f·A(tnow) 7)判断是否每个扇区分割线均已记录完Ntotal=11个时间,若是,则进行步骤8;若否,则处理下一帧数据; 8)遍历每个扇区分割线,计算 这里的Δt1,n为转台逆时针扫过第n个扇区分割线再顺时针回到该扇区分割线的时间间隔,其中,第一个下标1代表转台逆时针扫过扇区分割线再回来,第二个下标n代表的是扫过的是第n个扇区分割线;Δt2,n为转台顺时针扫过第n个扫过扇区分割线再逆时针回到该扇区分割线的时间间隔,其中,第一个下标2代表转台逆时针扫过扇区分割线再回来,第二个下标n代表的是第n个扇区分割线。 顺时针和逆时针经过扇区分割线再回到扇区分割线的时间间隔的计算流程如图3所示。 图3 时间间隔计算流程 若点迹的方位角度为A(k),则查找最近的扇区分割线,以该扇区分割线的时间间隔作为预测时间间隔,可以分为以下三种情况: 1)若点迹的方位角度An-θ/2≤f·A(k) 2)若点迹的方位角度An-θ/2≤-f·A(k) 3)由图4可知,若点迹落在A0~A0+θ/2或AN+θ/2~AN+1,即扇区起始角度和终止角度附近时,则不做处理,此时,在扇区起始角度,方位角损失的处理范围为θ/2,在扇区终止角度,方位角损失的处理范围不超过θ/2。 扇形扫描方式下,扇形扫描中心为40°,扇形扫描单侧范围为15°,即扇形扫描范围为25°~55°。无人机的飞行的方位角度为51°左右,贴近扇区边缘飞行,此时比较两种扇形扫描优化的方法,其中,方法1指的是基于Hough变换的航迹融合方法,方法2指的是基于扇区分割的目标预测时间计算方法,其结果如图4所示。 图4 扇形扫描处理结果 两种方法比较如表1所示。 表1 两种方法比较 经过实验可知,两种方法均能够改善扇形扫描过程中的目标易丢失、精度低的问题。其中,方法1简化了数据处理的过程,减少了计算量,缺点是牺牲了一部分时间,若航迹起始采用的是N/M逻辑法,那么至少需要N个完整的扇形扫描周期航迹才能够起批,此时融合后的首个起批的航迹中至少有2×N个点迹数据,其航迹的精度没有方法2好,航迹中点迹丢失的情况略差于方法2;而方法2能够得到较为精确的目标预测时间,实现快速起批,精度较高,丢点情况较少,但是运算量较大,在雷达开机后,需要一定的时间计算分割后每个小扇区分割线的预测时间。 从表1可以看出,与基于扇区分割的目标预测时间计算方法相比,基于Hough变换的航迹融合方法的航迹开始时间较长,丢失点数较多,航迹稳定性较差。 本文针对机械扫描雷达扇形扫描非均匀采样问题,提出两种解决方法,一种是基于Hough变换航迹融合方法,该方法将复杂的非均匀采样问题转化为两路并行的均匀采样进行处理,大大简化了运算量,但是牺牲了一部分的起批时间;另一种是基于扇区分割的目标预测时间计算方法,该方法通过划分扇区计算预测时间,计算出不均匀的采样时间,提高预测时间的准确性,能够快速且正确起批,精度较高,能够更加准确的进行预测和跟踪,但是运算量较大。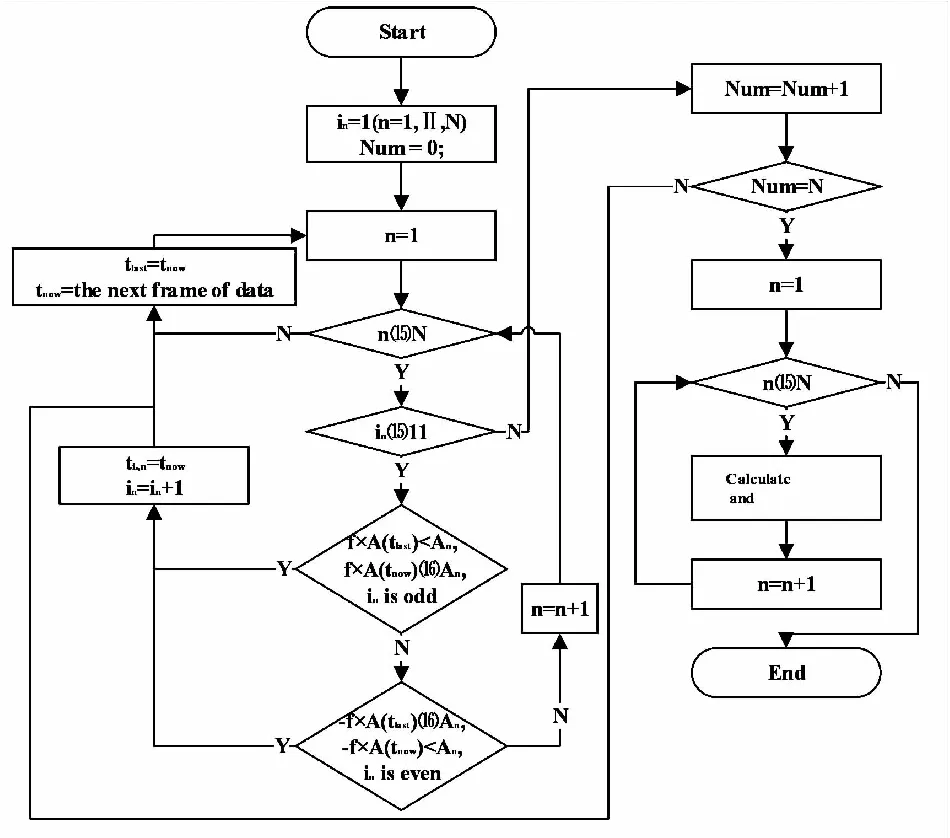
2 对比分析

3 结束语
