基于机械手搬运工件的自动化系统设计
2021-01-20刘凯
刘凯

为了提升机械手搬运工件自动化系统科学性和智能性应用质量,满足运动学应用要求,提高工业企业智能化发展水平,积极推动工业改革转型进程,要对机械手的运动过程予以全面分析。结合工作原理以及控制系统设计要点分析机械手的整体设计方案,并有效评估硬件设计内容和软件设计内容的具体处理细节,分析主控单元、电机驱动单元、系统电源、运动控制模块以及PLC控制模块的具体内容,利用Matlab软件分析运动轨迹,以便于建立对比分析和处理框架。通过仿真分析模块,验证出机械手搬运工件自动化系统的应用能大幅度降低人工劳动量,减少企业用人成本,也能提升工作人员的工作质量,避免人工操作危险性较大作业时的危险概率,保障人身安全。
伴随着市场经济的不断发展,工业企业要想提升市场核心竞争力,就要建构完整的技术分析模式,全面提高机械手相关运动轨迹的研究水平,发挥技术优势,打造智能化、自动化转型方案,实现经济效益和社会效益的和谐统一。
1.1 工作原理
机械手主要的组成部分包括驱动装置、控制系统等,总体结构设计要按照先后顺序完成相应模块的工作内容。利用电动推杆驱动机械手的抓臂,能完成货物的搬运管理,推杆在最短收缩位置时末端执行结构会将相应获取下降到指定的位置,然后驱动机械抓手和导杆带动右边的小抓手,开放到适当的角度和距离就能完成相应的工作。另外,机械手底座电动推杆驱动平行四边形结构制定搬运指令,保证初始位置搬运到指定的重点位置。除此之外,机械手还能结合货架的实际高度完成升降调控,在重复动作的过程中完成货物的搬运。
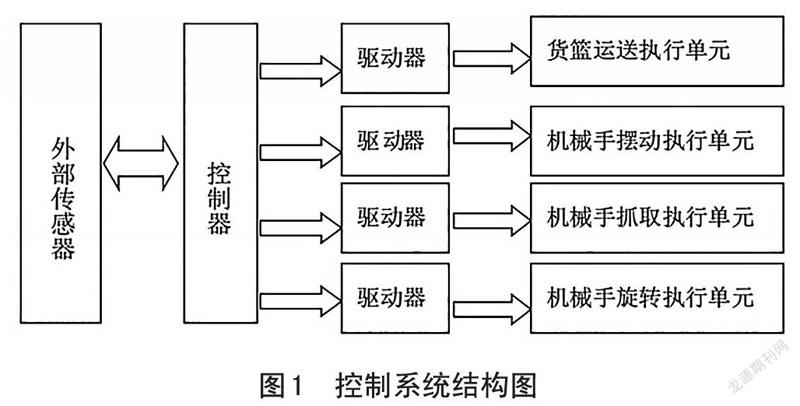
1.2 控制系统设计
在控制系统中,外部传感器和控制器的相互作用,能有效维持驱动器的应用效果,匹配“货篮运送执行单元”、“机械手摆动执行单元”、“机械手抓取执行单元”、“机械手旋转执行单元”,就能建构完整的控制器处理框架。
首先,外部传感器能及时完成货篮实际位置信息的读取和分析,并且将检测有效的信息数据转变为中央控制器获取的电信号,维持综合应用流程的规范性,确保处理效果满足预期。
其次,控制器能对相应的模块予以识别处理,并且配合机械手完成处理工作,促进机械手快速完成搬运处理工作。机械手的相关动作过程图配合电磁阀门,结合PLC输出继电器控制模式,使用输出端维持整体应用效果。
最后,利用延时控制回路就能对继电器等相关元件予以实时性管理,特别是在一些易燃易爆和粉尘环境中,处理模式能更好地维持应用效果。
2.1 控单元
2.1.1 数据存储模块
选择AT24C04数据存储模块,能有效实现数据信息的及时性富集和储存管理,保证电路连接的合理性和规范性,并且,信号端还能配合SDA建立主动单元连接机制,设计中符合16位回应要求。
2.1.2 复位模块
为了维持机械手搬运工件应用的规范性,机械手的X轴、Z轴和U轴、V轴都要设置发光元器件,复位时结合槽型光耦点维持遮光效果。需要注意的是,因为机械手在实际操作中无法回到原点位置,因此,输出的电压一般都是高电平,以保证电磁干扰环境的适应性和合理性。另外,工业设备会对光耦采集信号数据产生影响,所以,要结合传感器输入信号的隔离处理。
2.1.3. 编码器模块
在实际操作工序中,为了全面提升电机系统旋转角度的速度测试的合理性,就要配合增量编码器维持功能性电机速度和位移测试工作,匹配不同相处理要求,尽量提升引脚配置的合理性。
1)在编码器输出端输入A相和B相。
2)借助10K电阻维持电源DC5V的应用,保证部分关键引脚处于悬空状态。
3)结合STM32单片机应用要求,输入引脚内容,完成配置。
2.1.4 串口屏驱动模块
结合实际调研数据分析,目前串口屏幕以及TFT屏幕的应用较为广泛,为了维持STM32单片机应用的效果,要匹配总线线路连接结构,提升液晶显示屏幕应用质量。在选取屏幕线路排线的过程中,要维持线路距离为20cm,不仅要考量工业现场的生产环境,也要全面分析傳输距离等,从而基于FPGA技术进行串口应用系统的综合处理,维持串口指令的合理性和规范性,依据单片机发送的指令就能建立贴合串口通信协议的数据连接和传输模式。
2.2 电机驱动单元
在电机驱动单元设计过程中,要按照X轴、Z轴和U轴共同处理的方式予以控制,其中,U轴电机为57步进电机,其余皆为42步进电机。本文选取的是THB6128驱动芯片,配合电压220V、信号电压5V/24V脉冲信号,能维持较好的低导通电阻性能,并且具备较好的耐压数值(40V)。进电机选取的是混合步进电机,结合永磁式步进电机和反应式优势。
另外,系统在选择电阻参数的过程中,要确保互动电阻器能匹配电阻值,维持在K级电阻模式,设置对应的地线维持连接模式。与此同时,高速光耦和电阻的连接能在提升单片机信号处理效果以及抗干扰水平。
2.3 系统电源
在整个机械手搬运工件自动化系统硬件模块内,为了维持其稳定性、安全性,要匹配较好的电源,本文选定5V电源作为电源模塊,利用LM2575芯片。并且,要选取系统电流恒定模式,确保电路输出电流不会受到影响。
2.31. 单片机选型
采取的是![]() 型号32位单片机,其实际的电压参数选取范围[2.0:4.6],一般是利用4.3V,能在提升稳定性的同时,减少电源系统对单片机造成的影响。
型号32位单片机,其实际的电压参数选取范围[2.0:4.6],一般是利用4.3V,能在提升稳定性的同时,减少电源系统对单片机造成的影响。
2.3.2 主控单元电源
因为主控单元电源模块在实际应用中具有重要的作用,因此,要维持串口屏驱动模块、复位模块、编辑器模块等子模块的应用效果。在基础电源结构设计过程中,要在维持主控单元模块电流量最小的同时,配合使用USB接口维持电源应用质量。一方面,输入端输出的滤波和网络连接,确保芯片的滤波转化过程有序开展。另一方面,在完成连接的同时,选取参数对应性。
2.4 机械手设计单元
2.4.1 曲柄连杆结构设计
为了提升机械手搬运工件自动化系统中机械手单元的灵活性和可靠性,就要结合运动学规律对曲柄连杆结构的应用要求予以分析,为此机械手臂的规范性。因为,本文设计的是平行四边形机械手臂结构,因此,要想提升其稳定性和应用效果,就要在设计过程中对主要施加部位予以处理,维持刚度和强度参数的同时,保证其处于长时间工作状态下依旧能及时完成动作指令。另外,在设计材料选择的过程中,一般是选取工业铝型材料,能借助氧化处理提升耐久性,且清洗护理较为方便,能选定固定角件完成配置安装和处理工作。
2..4.2 抓手设计
抓手设计也是机械手设计单元中较为关键的环节,是机械手搬运工件自动化系统和获取直接接触的位置,此时,为了保证机械手设计实效性,就要整合拾取和夹紧动作设计的流程,维持货物稳定性。尽管机械手抓结构是依据人体工程学相应功能完成设计的,但是毕竟和人手动作存在差异,要利用不同部件连接方式完成指定动作。一方面,结合使用功能和机械手手部结构维持传递的规范性。另一方面,能匹配电动推杆驱动两岸结构,满足抓取和放下功能需求。
2.4.3 驱动装置设计单元
结合相关内容和设计要求可知,机械手驱动装置是电动模式,其质量直接影响机械手的搬运效率和质量,因此,要结合指令要求完善其设计内容,确保指令操作匹配度符合预期。若是电动推杆的推力不足,机械手就不能完成相应的搬运作业,若是推力较大,则会消耗过多的资源,造成资源浪费的同时也会提高系统设计成本。综上所述,要选取合适的电动推杆,保证其最大推力能在货物最大负载力以上。基于此,本文选取24V,空载为200mm/s的手臂电动推杆结构。
在明确工艺整体流程的同时,调控各个模块信息,维持工艺流程的同时,优化其操作质量。整体设计原理见图2:
3.1 PLC控制电路
3.1.1 PLC直接控制电动推杆
在机械手臂应用过程中,电动推杆具有非常重要的作用,主要是负责手臂抓取和驱动处理,在导通对应节点后,机械手臂就会在推杆电机的作用下接通电流,此时,电动推杆形成收缩趋势,摆动到固定的角度位置,这个动作能实现机械手臂移动。另外,在导通其他特定节点后,机械手臂就能在电动推杆电机的作用下形成收缩,然后建立抓手夹紧操作,循环重复就能维持控制效果。
3.1.2 PLC直接控制步进电机
若是机械手臂完成了货物篮抓取操作作业,为了避免其移动到其他位置,就要利用旋转手臂维持其处于固定的位置区域,从而保证后续动作的规范性。首先,建立CP1HPLC模块,按照对应的连接处理方式予以联动处理。其次,在发送脉冲指令到步进电机驱动器后,就要完成相应的指令分析和信息处理。最后,供电给步进电机,完成相应作业操作。
3.1.3 PLC控制直流电机
在传送带运转的过程中,运输货物篮要匹配对应的指令内容,在机械手臂所处位置的光电传感器感应参数后,才能建立识别和处理系统,维持驱动器的应用规范性,并依据指定区域内相应指令标准完成操作。
3.2 运动控制模块
3.2.1 电机驱动模块
主要包括电机端口配置单元、电机方向设置单元等,在初始化模块处理过程中,和电机驱动模块予以电气连接,维持驱动合理性,就能更好地提升脉冲信号的处理效果。基于此,为了实现电机驱动芯片的应用目标,要在掌握电平值的同时,结合细分数据设置不同的细分模块,以便于实时性了解驱动状态。
3.2.2 梯形加减速模块
要依据定时器、步数计算器、开关脉冲单元以及频率单元等进行全面分析,从而维持机械手搬运工件自动化系统软件结构的合理性。
总而言之,在机械手搬运工件自动化系统设计过程中,要结合总体设计方案的应用要求,强化对硬件、软件的处理水平,匹配对应型号的设备和软件系统,也要结合PLC控制理念,保证控制体系总体工艺设计内容和参数模型等都能符合实际要求,从而提升参数处理效果,确保机械手臂运动的流畅性,也为工业企业实现可持续发展奠定基础。
[1]林伟,赫英歧. 基于FX2N PLC的工件机械手搬运系统设计[J]. 冶金与材料,2017,37(6):18,20.
[2]帖秋菊. 基于机械手搬运工件的自动化系统设计[D]. 四川:电子科技大学,2019.
[3]何玉辉,王海旭,苗玉刚,等. 生产线搬运机械手控制系统设计[J]. 自动化技术与应用,2020,39(6):140-143.
[4]汪岚,程永强,陈育明. 基于PLC与触摸屏的工业搬运机械手控制系统设计[J]. 中原工学院学报,2018,29(3):61-65.
[5]黄培. 基于S7-200的搬运机械手的控制系统设计[J]. 办公自动化,2016(11):44-46.
[6]赵丹丹,黄越,郭宁,等. 机械手搬运机器人机电一体化设计[C]. 2016年海峡科技专家论坛暨海峡两岸智能制造(泉州)研讨会论文集. 2016:18-24.
[7]赵春云. 基于PLC的矿用搬运机械手的安装控制研究[J]. 机械管理开发,2019,34(6):231-233.
