高精度恒温箱温度控制系统的实现
2021-01-16彭梦迪
彭梦迪,郑 晟
(太原理工大学 电气与动力工程学院,山西 太原 030024)
0 引 言
水泥在水化时产生的热量叫作水泥的水化热[1]。水化热高的水泥不得用在大体积混凝土工程中,否则会使混凝土的内部温度大大超过外部,从而引起较大的温度应力,使混凝土表面产生裂缝,严重影响混凝土的强度及其他性能[2-4]。因此,必须对水泥的水化热进行准确测量,从而选择合适水化热的水泥用于混凝土。
相对于其他常见物质的发热量,例如1 g 煤炭的发热量大约为29 kJ,水泥水化热的量级是非常小的,大约为250 J/g,因此,热流传感器测得的热量信号是非常微弱的。而测量该热量的热流传感器灵敏度又非常低(约为0.1 mV/(W/m2)),所以量热装置周围环境温度的波动对测得水化热结果的影响非常显著[5-6]。
针对量热装置对其周围环境温度的高敏感性,为了保证水化热测量结果的准确性,需将量热装置固定在恒温箱内且保证箱内温度稳定度[7]为±0.02 ℃。首先,需设计恒温箱的机械结构,尽量减弱外界环境温度变化对箱内温度的影响,且保证温度控制的快速性和全面性[8-10]。其次,由于传统PID 的控制参数是固定不变的,响应速度慢、抗干扰能力弱、误差大等难以满足本系统高精度高稳定度的要求,而模糊控制不依赖精确的系统模型,仿照人的经验进行控制,对于非线性、时变系统控制效果很好,具有较强的鲁棒性和适应性[11-14]。综合考虑,本文提出一种模糊PID 的控制方式,并且通过所设计的精密恒温箱来验证该控制方式的有效性。
1 恒温箱机械结构部分设计
根据测量水泥水化热装置的大小,确定恒温箱的大小为50 cm×40 cm×40 cm,恒温箱采用空气循环系统,利用循环空气和温控系统使其温度保持高度稳定(在±0.02 ℃范围内波动)。空气循环流通一方面加快了加热冷却元件的迅速扩散作用,另一方面也解决了单一温度测点不能全面反映空间内各点温度的问题。
但恒温箱温度控制系统不仅要求箱内的温度保持一定的稳定度,同时还不允许出现温度死角和明显的空气流动,使箱内空间保持一定的温度均匀性,所以要对恒温箱的机械结构进行精密设计[15-16]。为此,本文采用多层箱式温度控制系统,其结构如图1 所示。
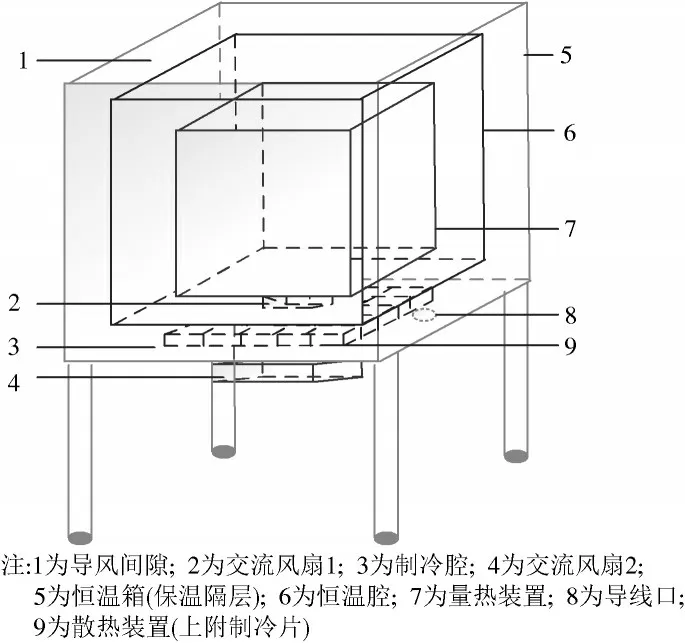
图1 恒温箱结构
1.1 恒温箱结构说明
整个恒温箱体外壳用不锈钢制成,箱内壁是真空绝热板,简称VIP 板,内外壁中间用聚氨酯发泡剂填满,形成一层3 cm 厚的隔热层;箱盖厚度为6.5 cm,且在与箱体接触的部分安装密封条。以上旨在减少箱内与外界环境的热量交换,减弱外界环境对箱体内部温度的影响。
恒温箱内部主要分为制冷腔和恒温腔。
1)制冷腔部分的主体即为等温散热装置,半导体制冷元件嵌于其上表面,制冷端朝上,热端朝下。冷量由交流风扇1 吹入恒温腔;热量经散热装置散失,交流风扇2 用来加速热量的散失,有助于温度的快速稳定。
2)恒温腔箱体由铁皮制成,箱盖留有16 个孔用来放置测量水泥水化热的搅拌器,箱底则要留有放置交流风扇2 的孔洞。
1.2 恒温箱内部工作说明
空气经过恒温腔与箱体之间的缝隙从恒温腔流入半导体制冷端,经过冷却后,在制冷腔中经过一次混合使空气的温度比较均匀。这些空气再由风扇1 从制冷腔吹入恒温腔,通过气流的流动,使制冷片上产生的冷量传递到恒温腔内,以保证恒温腔内空气温度的稳定性并使其内的温度场更加均匀。
恒温箱内温度的稳定性主要由下位机温控系统控制半导体制冷片工作来达到设定温度值的目的,而箱内整个温度场的均匀性则是由机械结构决定的,重点包括:
1)制冷后的空气要与原空气充分混合,使空气温度均匀。
2)交流风扇1 将混合后的空气吹入恒温腔,风扇功率要合适,功率过小,风量不足不能起到使空气均匀混合的目的,风量过大则会使空气气流组织混乱,温度场也会不均。
3)交流风扇2 负责将半导体制冷片热端产生的热量尽快散出去,以保证温度调节的快速性,需选用较大功率的风扇。
2 恒温控制系统的实现
由于该恒温箱控制系统要求精度较高,传统的PID很难达到理想的控制效果,而模糊控制器设计的依据在于人对被控对象的控制经验,构造容易,鲁棒性好,控制原理和实现策略容易掌握,因而考虑将模糊控制与传统PID 相结合的方法实现对恒温箱温度的控制[17-18]。
2.1 模糊PID 控制原理
模糊PID 控制器就是传统PID 控制器和模糊控制的有机结合。将系统的偏差e 和偏差变化率ec 作为模糊控制器的输入,然后根据模糊控制规则库进行模糊推理以及解模糊处理,实现对PID 参数KP,KI,KD的在线整定,传统PID 在获得重新整定后的参数后对控制对象输出控制量[19]。模糊PID 控制器原理示意图如图2 所示。
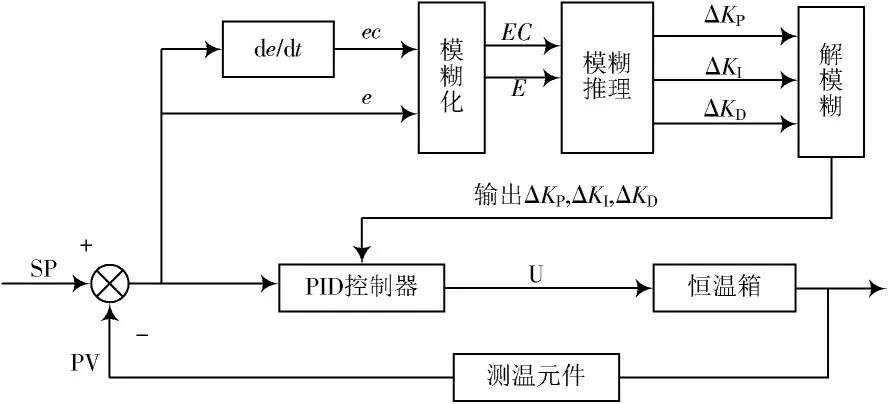
图2 模糊PID 控制器
2.2 模糊PID 控制器控制规则设计
为保证控制器的功能要求,将模糊调节的输入e 和ec 以及三个输出ΔKP,ΔKI,ΔKD的变化范围都定义为模糊集上的论域{-3,3},其模糊子集为e,ec,ΔKP,ΔKI,ΔKD={NB,NM,NS,ZO,PS,PM,PB},分别代表负大、负中、负小、零、正小、正中、正大。为保证覆盖程度和灵敏程度,各变量都服从三角形隶属度函数分布。
在各种e 和ec 情况下,被控过程对PID 三个参数的要求如下:
1)若|e|较大时,ΔKP取较大的值,使系统响应速度加快;令ΔKI=0,防止系统响应的超调过大。ΔKD取较小的值,防止开始时偏差突然加大而可能存在的微分过饱和现象。
2)若|e|和|ec|中等大小时,ΔKP取较小的值,ΔKI和ΔKD取适中值,保证系统超调量相对较小。
3)当|e|比较小时,ΔKP和ΔKI取较大的值,而ΔKD取适当值,以此来避免在平衡点附近出现系统振荡。
4)若|ec|较小,ΔKP,ΔKP需较大;|ec|较大,ΔKP,ΔKD需较小。
由以上理论知识以及现场实际调试经验设计出的PID 三个参数变化量的整定模糊控制表,如表1 所示。控制系统对模糊逻辑规则的结果进行处理、查表和运算,完成对KP,KI,KD进行在线自动调整。其计算公式如下:
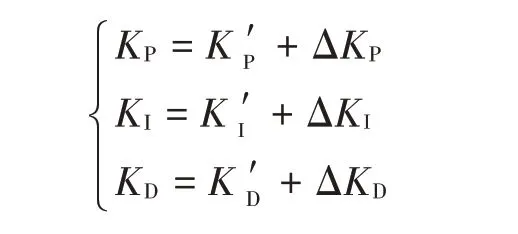
式中:KP,KI,KD分别称为PID 控制器的比例系数、积分系数、微分系数;为最初整定好的PID 参数;ΔKP,ΔKI,ΔKD分别为通过模糊推理得到的参数增量值。
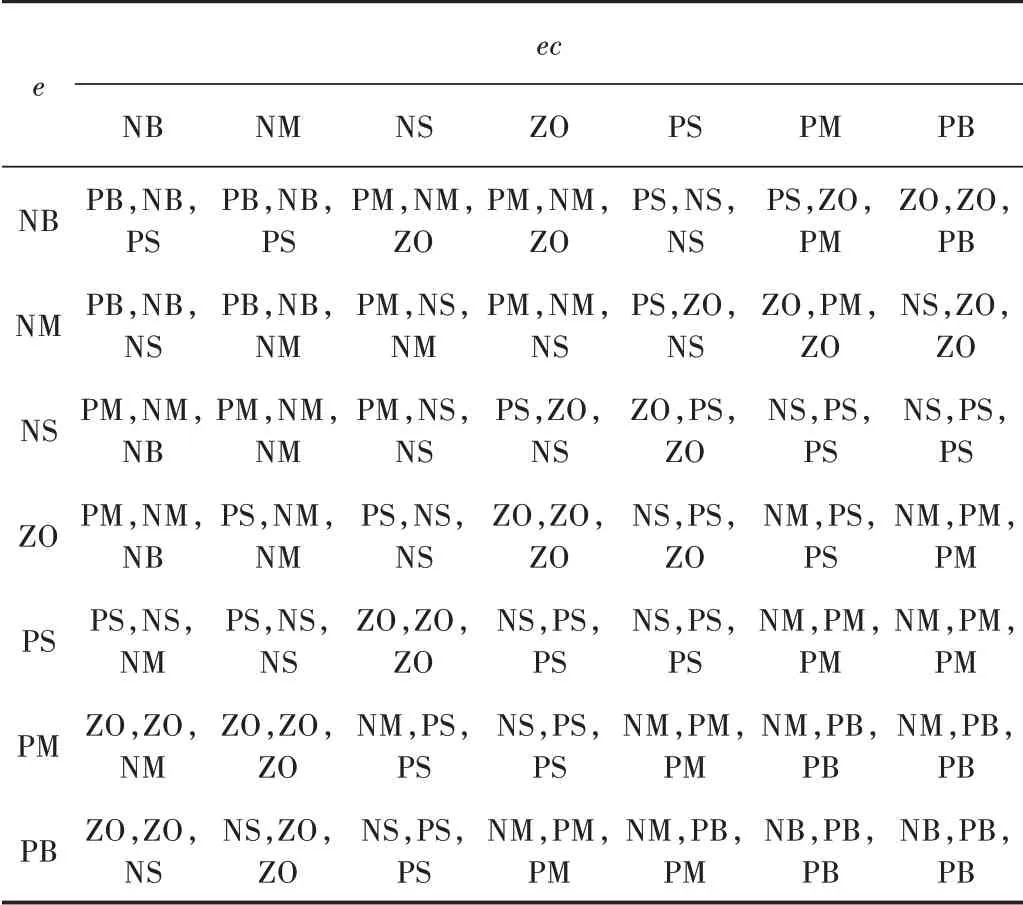
表1 ΔKP,ΔKI,ΔKD的模糊控制规则表
3 温控系统实验结果
本文设定目标温度值为20 ℃。首先对恒温箱进行传统PID 控制,通过多次整定PID 控制器的控制参数,得到其温度变化曲线如图3、图4 所示。
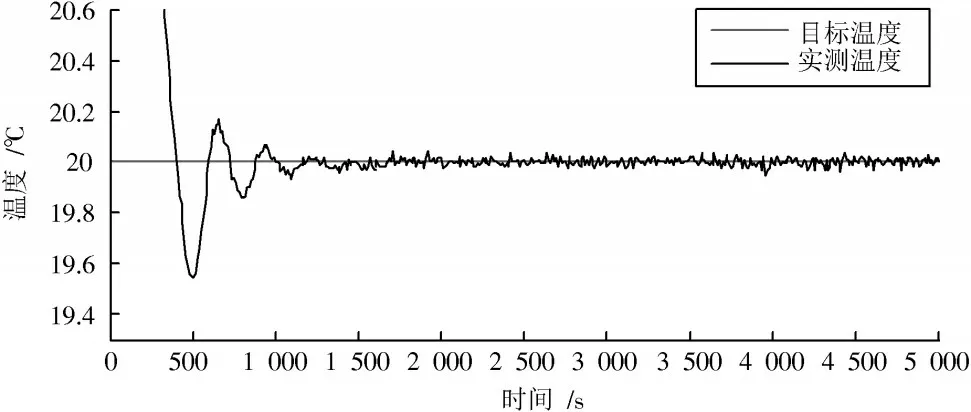
图3 传统PID 控制方式下的温度曲线

图4 传统PID 控制下温度稳定后30 min 内的曲线
由图3、图4 可以看出,恒温箱内的温度在25 min 左右就达到了20 ℃附近,但是温度曲线毛刺较多,稳定后温度变化并不能稳定在(20±0.02)℃,不能满足测量水泥水化热的温度要求。
运用模糊PID 控制算法控制的温度变化过程如图5、图6 所示。
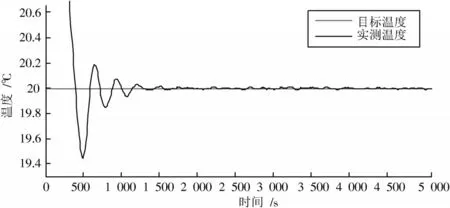
图5 模糊PID 控制方式下的温度曲线

图6 模糊PID 控制下温度稳定后30 min 内的曲线
由图5、图6 可以看出,模糊PID 控制的温度变化过程与传统PID 控制相近,在控制时间上差不多,都是在25 min 左右达到目标值附近,但是其控温过程更为平滑,而且温度在稳定后波动范围在±0.02 ℃,满足测量水泥水化热的温度要求。
4 结 语
本文以准确测量水泥水化热为背景,设计实现一个稳定度为±0.02 ℃的高精度恒温空气箱控制系统。针对高精度温度控制中的重点和难点,对各个环节可能出现的问题进行策略研究,并对箱体结构进行精密设计,且提出一种基于STM32 的温度控制系统。对于提高测量水泥水化热的精确度及提升混凝土质量都有非常重要的意义,同时对于各种由于所测对象是微小信号而需要高精度、高稳定度温度环境的一般研究也具有一定的借鉴意义。
