一种小型无人驾驶环保清扫车机构设计 ①
2021-01-15王少俊史立秋
江 霖, 程 亮, 王少俊, 史立秋
(浙江水利水电学院机械与汽车工程学院,浙江 杭州 310018)
0 引 言
城市环卫清扫市场规模巨大,据粗略估算,全国道路清扫的费用已经接近万亿量级,而环卫公司60%以上是人力成本。无人驾驶清扫车每小时能行驶4公里,清扫宽度在2~3米之间,一辆车干的活相当于10~20人的工作量,国外由于人力成本高和保洁标准的不同,市场规模更大[1-4]。
目前,已有部分企业的无人驾驶清扫车已投向市场应用,清扫的基本功能都已实现,但还并未出现清扫设备处理上的再升级[5-9]。本文主要对无人驾驶清扫车的清扫部分进行设计,在清扫装置上做出创新突破,在保证车辆低速平稳行驶前提下,增加垃圾粉碎箱和压缩箱等机构,意在提升垃圾存储效率。除了充电和加水,无人驾驶清扫车不受时间的限制,有效地将道路清扫保洁从低效率、高风险中解放出来,还可以减少扰民现象的发生。
1 小型无人驾驶清扫车总体设计
本文设计的小型无人驾驶清扫车的总体设计方案路线图如图1所示。
整车的研究对象就是它的传感器的选配、车载动力基础、车身结构的布置、以及清扫装置设计方案这四大部分,总体结构方案如图2所示。
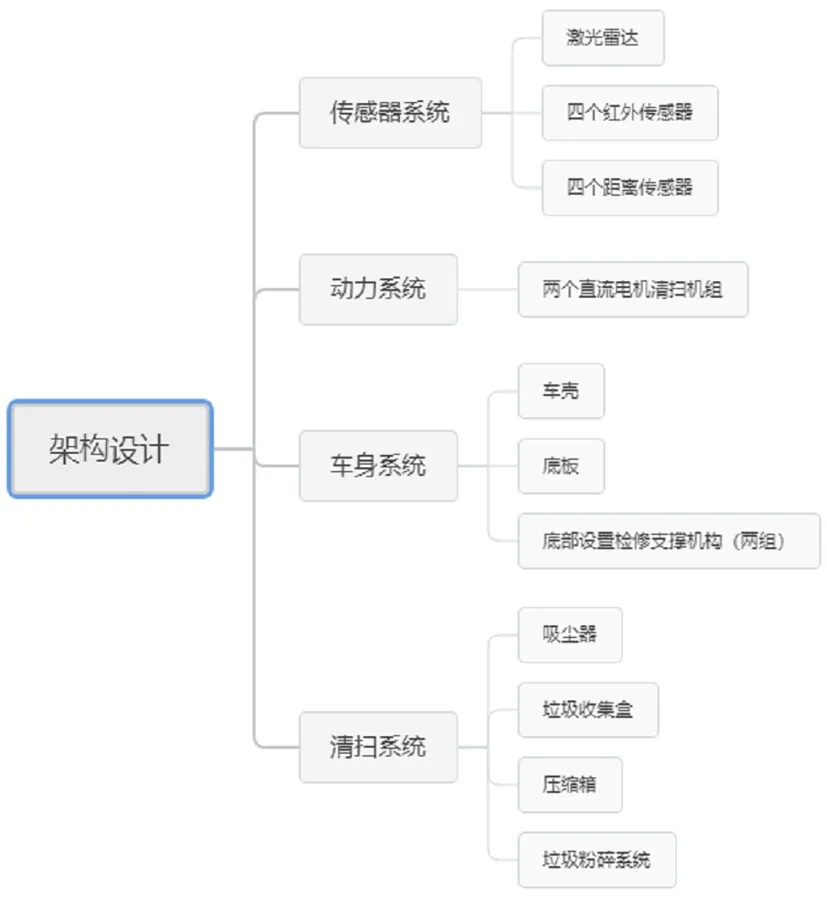
图1 总体方案设计路线图
本文具体的改造方案实施主要体现在车身的结构位置的布局上,以及整个清扫系统如何才能更加高效稳定的运行,既要考虑到车辆的清扫效率,也需要方便车辆的后期运维。设计的亮点是在于垃圾的处理上,传统垃圾清扫车需要人工驾驶作业,相较来说无人驾驶的清扫车去掉了人工座位,留出了更多的空间可以根据功能要求来应用,可以考虑在内部增加一部分垃圾处理机构,这里添加了垃圾收集的粉碎装置和压缩装置。
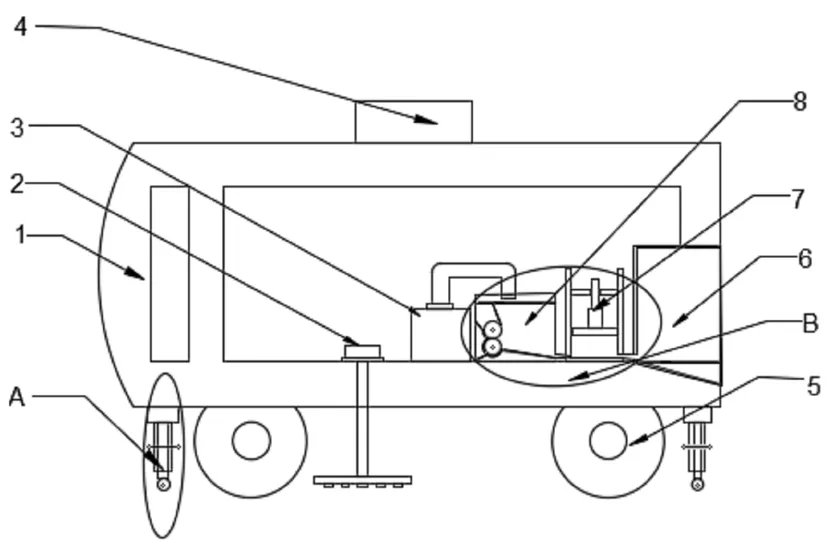
1 车体 2 清扫机 3 吸尘器 4 激光雷达
车载底盘上固定安装了位于电动粉碎辊机组一侧的导料板,车体的底部固定安装有位于垃圾收集盒一侧的压缩箱,压缩箱的内壁上滑动安装有挤压板,车体的底部固定安装有液压缸,液压缸的输出轴延伸至压缩箱内并与挤压板固定连接。
底盘的设计根据车体体积规划,底盘设计是按照300*150大小,支撑装置承受着来自整机的全部重量及辅助装置重量,因此对其进行设计时,需要综合考虑材料的抗压、抗弯曲性能以及尺寸大小。整体采用铝合金结构,底盘上所固定的清扫机构主要规划了两个清扫机组固定圆柱孔、两个吸尘器的的位置固定座、垃圾粉碎箱的固定座、垃圾压缩箱的固定座、垃圾收集盒等各个机构的位置规划,以及四个车轮位置的预留。
底盘对清扫机组的预设大致可分为两类:一是将两组清扫机组安置在两侧或者45°前方,一般是用于大型的清扫任务,常见的就是公路上的道路清扫车;二是安置在车底部,优势是节省空间,不占用道路面积,但相对的清扫面积也相对较小,广泛应用于小区、公园、学校等诸多封闭是场所。相比之下第二种更适合这次的设计主导思想,故可在底盘位置打对称孔固定清扫机组。
底盘对吸尘器的设置需要配合清扫机组,一般吸尘器的设置会紧随清扫机组之后,因为我们这里后续还要用扫粉碎、压缩等功能型机构组,故可将吸尘器设置在两侧,通过吸尘器收集上来的垃圾可直接导入中间位置的垃圾粉碎机。
粉碎机和垃圾压缩箱属于垃圾处理工具,在垃圾输送的过程中对垃圾进行加工处理,为减小不必要的输送问题,可将两机组尽可能的靠近,通过输送通道连接,最终将加工好的垃圾送至车辆尾部的垃圾收集盒。
为了方便对垃圾装卸,末端的垃圾收集盒在车体上两侧边设置有轨道,可通过旋转把手,直接拉出倾倒。清扫车底盘三维建模图如图3所示。

图3 清扫车底盘三维图
2 运动仿真
对无人驾驶清扫车的运动仿真这里可直接通过Solidworks软件进行操作,在装配图上通过新建运动算例进行运动模式的设置。通过在对应的设备机构件上添加马达,设置马达类型以及运动轨迹,来编辑无人驾驶清扫车在清扫过程中各部分机构的运行机制。在清扫机上设置旋转马达,马达位置安装在车体底板平面,旋转方向选择车体底板孔圆边线,相对移动的零件选择清扫机,完成清扫机的旋转运动。在粉碎箱内的齿轮上添加旋转马达,马达安装在粉碎机箱轴侧面,旋转方向选择轴的边线,相对移动的零件选择齿轮,完成粉碎机的齿轮运动。在压缩箱内的压缩件上设置线性马达,马达安装在压缩箱侧面重合边线,驱动方向选择压缩箱垂直边线,相对移动的零件选择压缩件,完成压缩件的驱动配置。
最终达到车辆在正常行驶的过程中,位于底部的清扫机在匀速转动,对地面进行清洁;位于车体内部的粉碎机两部齿轮相向转动,进行辊式粉碎;其后的压缩箱内,压缩件上下迅速移动对垃圾进行压缩。整体运动仿真功能如图4所示。
无人驾驶清扫车的底盘承载着整车的机构部件,需考虑其应力作用的影响,本文主要通过Solidworks软件中的插件simulation功能对车体底盘进行应力仿真分析。在外部载荷功能版选择力,设置车体底盘的上端面为加载力的面,输入力为1000N,如图5所示。
点击运行求解,得出车底板的应力仿真示意图,如图6所示。
由上述的载力仿真结果可以得出,通过给车体底盘施加一个大小为1000N的承载力,底盘的受力分布主要表现为四周所承受的载力较大,且并不均匀,主要在角落位置的受力较为严重。因此可以考虑从结构上,对车体底板的边缘进行加厚,或者做一个上升的台阶,另一方面可以适当的扩大底盘四角的倒圆角,以减小应力集中的问题。

图4 仿真运动

图5 加载力设置
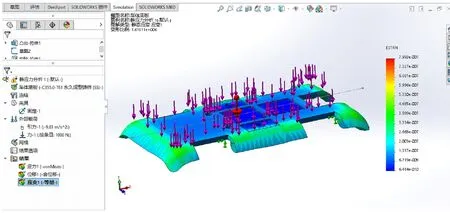
图6 底板应力仿真
3 结 论
从无人驾驶清扫车结构入手,对车辆的整体外部结构进行分析,主要包含了车辆的底盘和车身结构,以及清扫机构的扫地机、吸尘器、垃圾收集盒、粉碎箱、以及压缩盒等多个方面进行全方面的研究。并对整车的运动以及底板承载力分析两部分进行仿真,底盘的受力分布主要表现为四周所承受的载力较大,且并不均匀,主要在角落位置的受力较为严重。因此可以考虑从结构上,对车体底板的边缘进行加厚,或者做一个上升的台阶,另一方面可以适当的扩大底盘四角的倒圆角,以减小应力集中的问题。
