一种清扫设备的电控系统设计
2021-01-12李超杨晓鸿胡翰林范庆波李瑞
李超 杨晓鸿 胡翰林 范庆波 李瑞

[摘 要]为了提高原煤卸料后的清扫效率,降低人工清扫时的安全隐患。设计了一种可以为原煤车皮内部清扫的清扫机构,该设备主体结构包括了机械结构和电控系统,文章主要研究了该机构的电控程序设计问题,给出了一整套基于西门子1200系列PLC的操作控制系统。经过校正后。该系统能够较好地满足清扫机构的清扫要求,同时提高了安全保障,降低了人工的劳动强度。
[关键词]清扫机构;PLC控制;梯形图
[中图分类号]TM615 [文献标志码]A [文章编号]2095–6487(2021)11–00–03
Design of an Electric Control System for Cleaning Equipment
Li Chao, Yang Xiao-hong, Hu Han-lin, Fan Qing-bo, Li Rui
[Abstract]In order to improve the cleaning efficiency of raw coal after unloading and reduce the potential safety hazards during manual cleaning. A cleaning mechanism which can clean the inside of raw coal wagon is designed. The main structure of the equipment includes mechanical structure and electric control system. This paper mainly studies the electric control program design of the mechanism, and gives a complete set of operation control system based on Siemens 1200 series PLC. After correction. The system can better meet the cleaning requirements of the cleaning mechanism, improve the safety guarantee and reduce the labor intensity.
[Keywords]cleaning mechanism; PLC control; ladder diagram
铁路作为煤炭供给运输的主要方式,由于存在着运输瓶颈的客观因素制约,运力配置不平衡,因此煤炭运输的质量和品质至关重要。原煤车皮作为主要运输原煤的火车,在运输过程中会遇到各种天气,造成车厢内部存在复杂多变的情况。因此,本着改善和解决该现象设计了一套专门用来清扫车皮的清扫设备的控制系统。该系统通过多个不同的控制模块组合起来以此灵活控制清扫机构的动作,并以此实现自动清扫的目标。
1 清扫机器人的控制方式
本文研究的清扫设备使用上位机和下位机通过RS485进行串行通信的形式。其中作为上位机的触摸屏主要是为了实现人机交互,实时查看设备运行状态和机器人运行时的参数输入。下位机则是由PLC作为CPU实现机器人逻辑运行功能,满足工艺需求。机器人电气控制系统主要由以下几个部分组成:触摸屏监控系统(上位机)、PLC控制系统(下位机)、控制元器件、变频电机及变频器。一方面,PLC通过指令直接控制清扫设备电机的各种动作;另一方面,不间断实时收集各类型传感器传输回的数据并通过软件处理后显示在触摸屏上。
2 清扫机器人PLC控制系统
清扫机器人PLC控制系统主要由西门子1200PLC、电机控制电路、信号采集传输电路、电源电路组成。
2.1 西门子1200系列PLC
作为原煤K车皮清扫机器人控制系统的最关键核心器件,经过反复的比较与选型,选取西门子1215C作为PLC的型号,1215C为100 KB工作存储器;
24VDC电源,板载DI14x24VDC漏型/源型,DQ10x24VDC及AI2和AQ2;板载6个高速计数器和4个脉冲输出;信号板扩展板载I/O;多达3个通信模块用于串行通信;多达8个信号模块用于I/O扩展;0.04 ms/1000条指令;2个PROFINET端口用于编程,HMI和PLC间的通信。
2.2 电机驱动部分
图1是PLC的接线端口图,电机的控制及其转速控制是通过PLC端口与变频器链接后通过变频器控制电机转速。通过PLC程序按一定得控制目的运算后,由AO模块(模拟量输出模块)输出控制信号(电流或电压信号)至变频器,即可实现PLC——电机的调速。
2.3 传感器感应部分
对射型光电开关的特点在于:可辨别不透明的反光物体,有效距离大,不易受干扰,高灵敏度,高解析,高亮度,低功耗,响应时间快,使用寿命长。广泛应用于投币机、小家电、投币机、自动感应器、传真机、扫描仪等设备上面如图2所示。
本清扫设备设置二组对射型光电开关,第一组光电检测车厢的开始运动;当第二组光电开关起作用后行走机构移动到指定位置,设备开始自动运行。
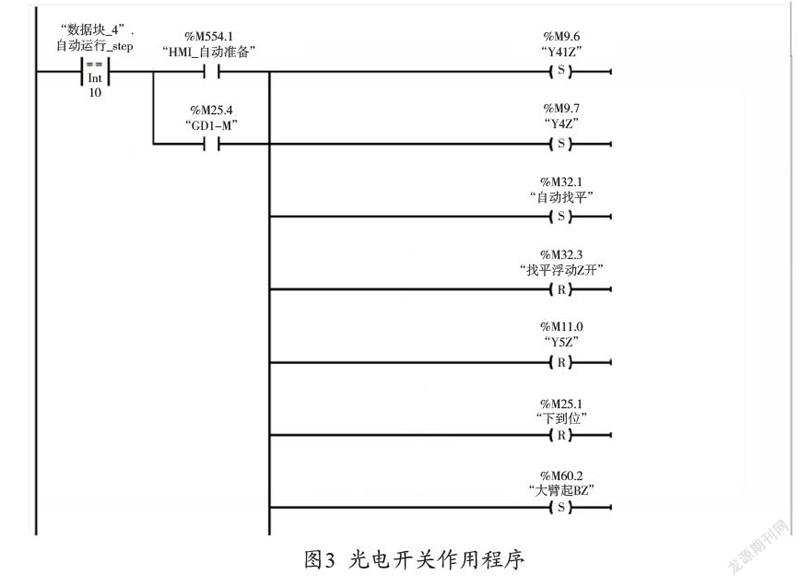
图3为光电开关的部分PLC程序梯形图,当接收到感应信号后,清扫机器人各部分开始置位预启动和复位等待接收信号指令。
3 清扫设备控制程序
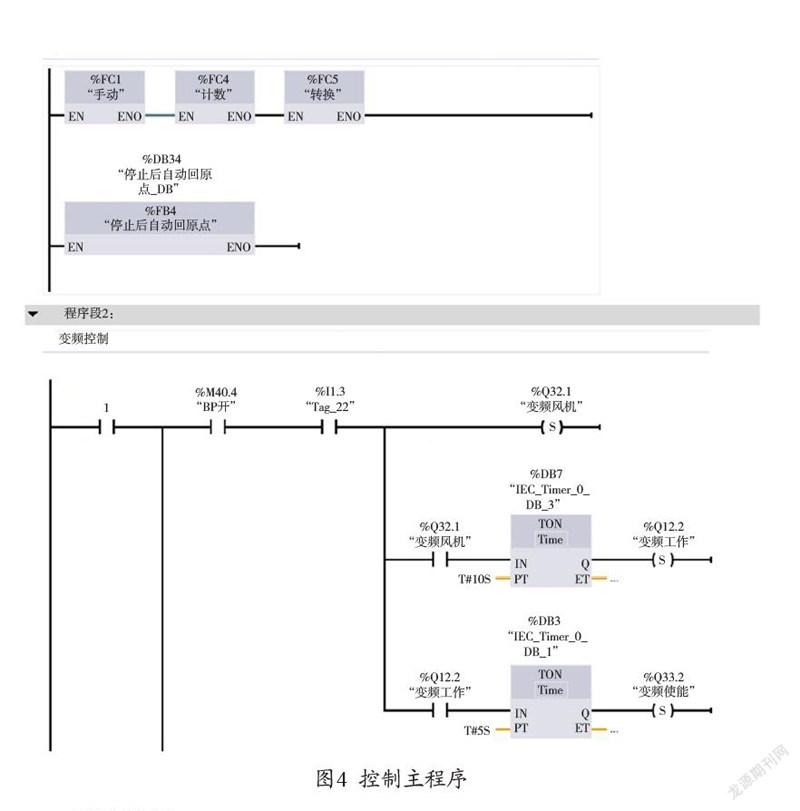
清扫装置的程序由一个主程序作为主体,各子程序模块嵌入其中。清扫装置的子程序分为:手动模块、计数模块、转换模块、自动回原点模块、AUTO自动模块、故障模块、找平模块和位移开关模块。各子模块组合到一起来实现对清扫机构的整体控制。图4为控制主程序。
3.1 手动模块
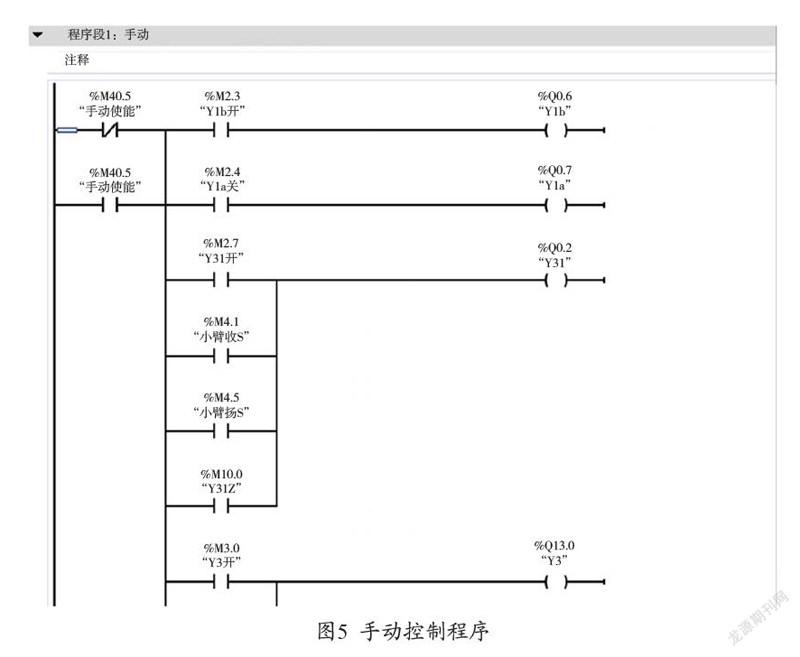
图5为手动模块部分梯形图,手动模块是在清扫机构开始启动时做手动调试和试运行的模块。当设备电源打开后,通过触摸屏上按钮启动变频器等频率达到50Hz时在进行清扫机构的各部位手动调试,以此来确定设备的整体状态。
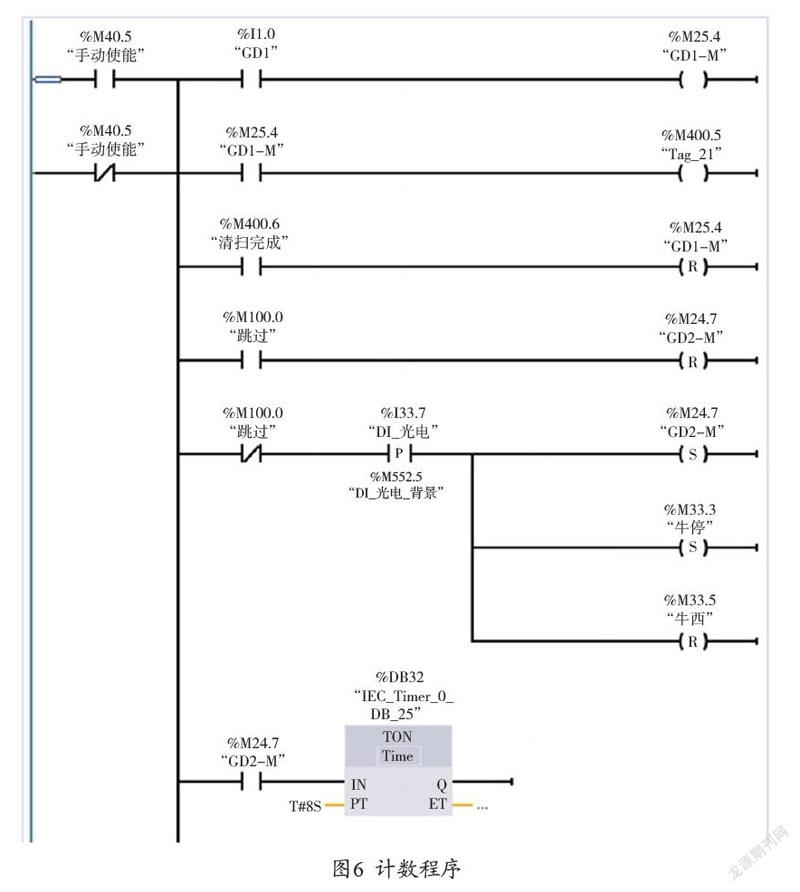
3.2 计数模块
图6为计数模块部分程序梯形图,计数模块是通过前后光电开关来对清扫完成的车厢进行计数统计来实时显示当前的清扫车厢数。
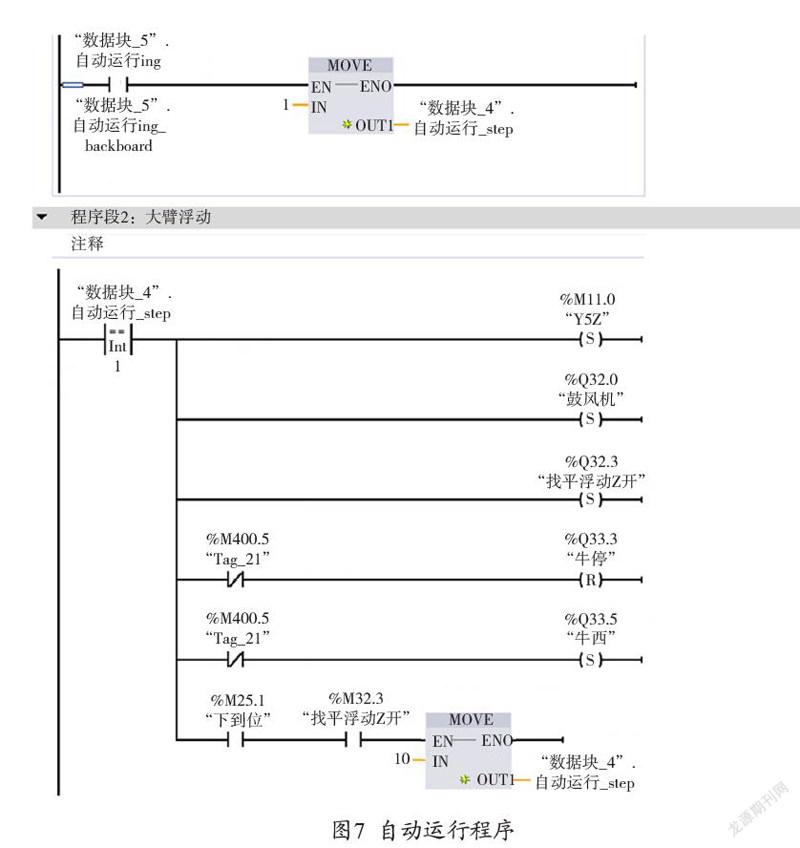
3.3 自动运行模块
图7为清扫机构的自动运行模块的部分程序梯形图,该模块为使清扫机构具备自动运行的程序模块,通过扫描上升沿指令、转移值指令、比较指令、接通延时指令来对清扫机构的自动运行过程中的操作顺序进行编排与设计。
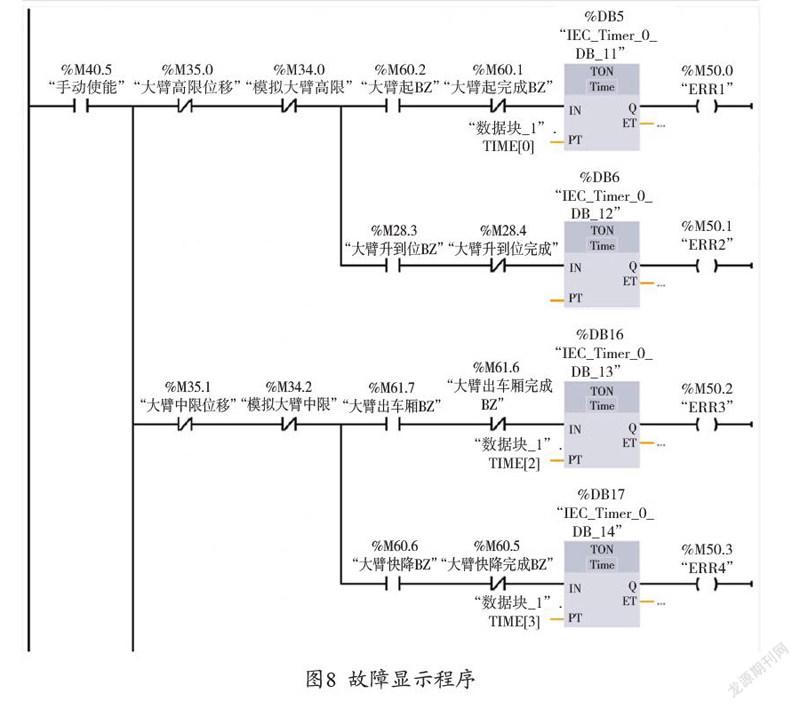
3.4 故障模块
图8为故障模块的程序梯形图,该模块为当任何一处点位发生故障时,会给出相应的报警指示,提示当前故障故障位置。
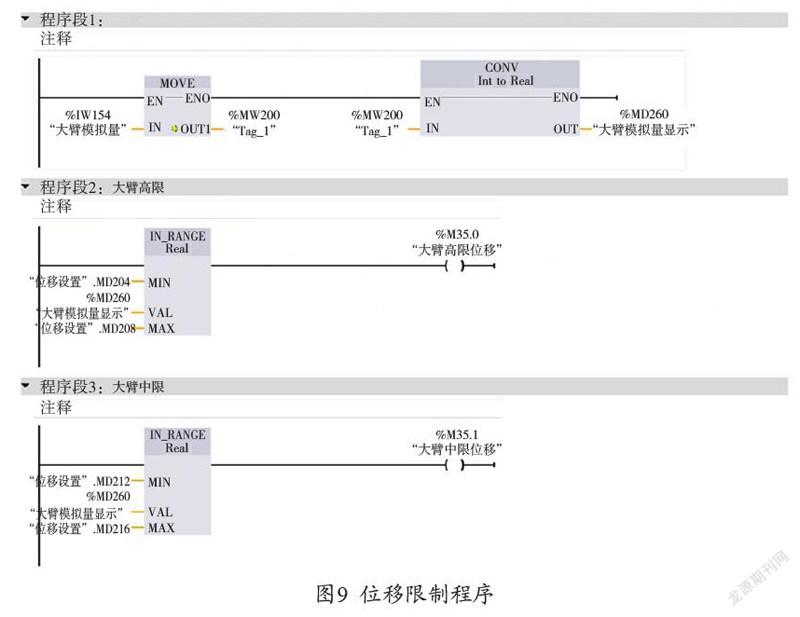
3.5 位移开关模块
图9为位移开关模块的部分程序梯形图,该模块为当清扫机构使用自动运行模块时通过值范围指令来判断清扫机构相应分布动作是否完成到位,以此来继续进行下一階段的动作。
4 结语
根据清扫设备清扫技术要求,提出了一种以触摸屏结合PLC为核心的控制系统,该系统实现了远程操控清扫机器人完成复杂清扫功能的技术要求,解决了清扫设备在清扫车皮内部复杂环境时遇到的清扫困难等问题。
参考文献
[1] 刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社,2008.
[2] 都家宇.智能清扫机器人行走驱动系统设计[J].科技资讯,2017,15(30):100-103.
