基于树莓派的固定路线巡航消毒机器人设计
2021-01-08沈家礼蒋其友杨环刘津江邬浩
沈家礼 蒋其友 杨环 刘津江 邬浩


摘 要:文章基于机器视觉树莓派智能小车,采用人工智能深度学习方法,自动识别特定物体精准定位,同时进行紫外杀菌和喷洒消毒,并通过激光雷达自动扫描规划巡航路线,能适应室外空旷与室内复杂环境,全过程无人值守。
关键词:机器视觉;自动识别;自主巡航;人工智能;激光雷达;消毒机器人
0 引言
自新冠疫情暴发以来,公众对公共卫生安全的关注度越来越高,由于病毒具有多种传播途径,人们开始关注周边的公共卫生安全、追求更加安全的居家生活环境。大量临床研究结果显示,新冠型疱疹病毒已经能够在一些低温光滑的人体表面持续生存很长一段时间。鉴于在学校、医院、宾馆这类消毒工作路线比较固定的场所,消毒机器人有更高的工作效率。一个40 m2的大型外科病房,传统的医疗机械手和人工生物推车一次消毒一般需要6 h,消毒机器人能够4 h一班地奔忙于一线医院病房之间的通道运输消毒食品,减轻了一线住院医务人员的工作强度,大大降低了一线医患相互之间交叉感染病毒发生的危害。目前,消毒杀菌机器人常用的自动消毒生物杀菌处理手段主要包括:激光超干杀菌雾化消毒过氧化氢、紫外线杀菌消毒、等离子净化空气消毒过滤等。使用消毒杀菌机器人可以根据不同的消毒环境,自动准确辨认进行消毒的细菌目标和物质选择相应的消毒杀菌手段。
本文采用树莓派作为主控,设计一种按照固定路线巡航的消毒机器人,消毒机构采用固定设计,只对设定的物体进行消毒,既减少了用药量,也简化了整机控制难度,提高了机器人的可靠性。
1 系统整体设计
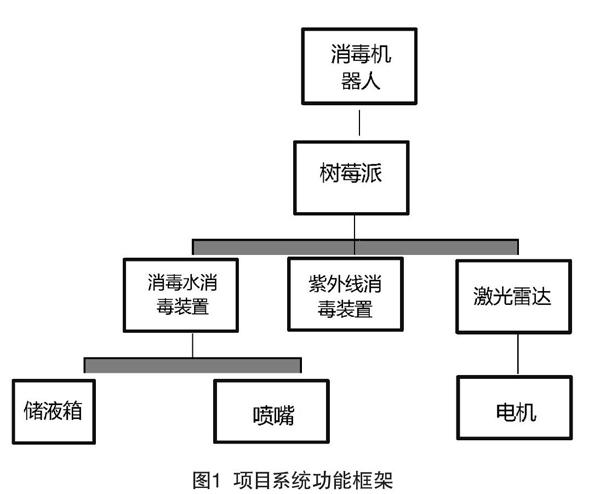
项目系统功能框架如图1所示,主要分为4个部分:(1)路线构造部分,利用激光雷达和学习室内地图构造使机器人能自动规划消毒路线和完成自动避障功能。(2)消毒机构部分,包括药箱、水泵、喷嘴、紫外线灯灯,可根据固定路线中的消毒点位置定位,确定消毒点的高度;设定消毒方式和消毒时间,完成高效率的消毒工作。(3)机器人驱动部分,编写并完善消毒机器人电机驱动程序和其他驱动程序,以便机器人能完成基础的前进、倒车、拐弯等功能,配合完成自動规划路线和自动避障;此外,还需研究消毒装置中消毒喷雾的配比和紫外线强度的照射。(4)主控部分,采用树莓派,负责存储路线、位置点、基于树莓派完成机器人全部设备的搭建。此外,树莓派还能在完成消毒工作后对消毒点进行统计和上报消毒报告。
2 自动巡航设计
张大伟等[1]研究基于双目视觉惯性SLAM技术,可以让消毒机器人利用两个独立的摄像视角,实现对自身所在的相对位置进行估定、对工作环境的地图进行构建、对行驶过的路径进行记录。赵良玉等[2]研究的点线特征融合的环境特征提取方法,可以在很大程度上减少采集摄像机采集到大量劣质、无效的特征线段,进而大幅提升定位的精度,提高地图和路径图的质量,降低后期线段匹配的复杂度。
利用SLAM技术构建的环境地图,在行驶过程中,进一步基于郑欣悦等[3]研究的三维激光雷达,对环境进行定位精度优于1 cm的探索,能有效降低单独使用视觉特征构建地图产生的误差,并且进一步对地图进行调整优化,更精确地对障碍进行规避,提高了自动巡航能力的鲁棒性。
3 消毒结构设计
项目系统结构如图2所示。消毒机器人内部置有可以升降的收缩杆,杆上置有药剂喷头与紫外线灯若干,可以设定升降高度,以更有效地对目标物表面进行紫外线照射、消毒剂喷雾消杀作业。
消毒剂喷雾可选用75%酒精、过氧化氢溶液、一片含氯泡腾片溶于1 L清水、一包消毒粉加4.8 L清水,其中,后两种含氯的消杀方式只限于在卫生间与露天阳台使用。
4 树莓派主控设计
树莓派是一种基于Linux系统的小型微型计算机电脑,常被应用在软件编程等教育工业,功能强大,小巧便携。在本项目里,需要主控模块学习消毒构造、控制行进、地图构建、WiFi连接、数据上传、缺水(药)报警、统计报告等功能,树莓派实现流程模块如图3所示。
本次项目所需要使用的处理器是最新上市的树莓派4b,其是一款拥有4核处理器和强大的多媒体功能的微型计算机,相对于上一代的树莓派3b+,4b凸显出许多特点,例如,在处理器的运行速度、多功能的性能以及内存、拓展等诸多方面,都有了新的突破和飞跃,还保留了强大的兼容性。
5 结语
本文研究了采用激光雷达技术使机器人完成避障任务。本设备基于树莓派和机器视觉技术设计了自动识别并自动巡航以及紫外线杀菌和喷洒消毒。通过搭建人工智能平台让机器人深度学习识别消毒目标,在不同的目标识别之后能独立完成规划巡航线路,适应不同的复杂环境。研究发现在消杀过程中此装置的喷洒效果有待改进,会在日后的研究中着重改进软硬件的匹配程度。
[参考文献]
[1]张大伟,苏帅.自主移动机器人视觉SLAM技术研究[J].郑州大学学报(理学版),2021(1):1-8.
[2]赵良玉,金瑞,朱叶青,等.基于点线特征融合的双目惯性SLAM算法[EB/OL].(2021-03-01)[2021-11-20].http://hkxb.buaa.edu.cn/CN/10.7527/S1000-6893.2021.25117.
[3]郑欣悦,赖际舟,吕品,等.基于红外视觉/激光雷达融合的目标识别与定位方法[J].导航定位与授时,2021(3):8.
(编辑 王雪芬)
A fixed-route cruise disinfection robot based on Raspberry Pi
Shen Jiali1,2, Jiang Qiyou1, Yang Huan1, Liu Jinjiang1, Wu Hao1
(1. Jiangsu Vocational College of Agriculture and Forestry, Zhenjiang 212400, China; 2. Jiangsu University, Zhenjiang 212013, China)
Abstract:The equipment is based on machine vision raspberry intelligent car, using artificial intelligence depth learning method, automatically identify specific objects accurate positioning, at the same time ultraviolet sterilization and spraying disinfection, and through lidar automatic scanning planning cruise route, can adapt to outdoor open and indoor complex environment, the whole process unattended.
Key words:machine vision; automatic recognition; autonomous cruise; artificial intelligence; lidar; disinfection robot
基金项目:2020年江苏省大学生创新创业训练计划项目;项目编号:202013103062y。
作者简介:沈家礼(2000— ),女,江苏南通人,本科生;研究方向:物联网工程。
