虚拟同步发电机参数自适应调节
2021-01-08任海鹏张亮亮
任海鹏,陈 琦,张亮亮,李 洁
(西安理工大学陕西省复杂系统控制与智能信息处理重点实验室,陕西西安 710048)
1 引言
随着新能源发电的发展,大量新能源,如太阳能发电、风能发电等,通过电力电子变换器接入电网,使电网的稳定性分析和控制变得复杂和严峻[1].虚拟同步发电机(virtual synchronous generator,VSG)技术使新能源发电节点具有和传统同步发电机相似的外特性,改善(含有大量)新能源电网的稳定性提供了有效的途径[1-4].VSG并网系统的稳定性,是指在扰动信号(功率扰动,线路参数摄动等)作用下,系统维持功率平衡的能力.VSG的控制需要确定4个参数,即虚拟转动惯量J、阻尼下垂系数Dp、积分增益K、电压下垂系数Dq,其中Dp和Dq在并网标准中规定[5-6]分别为频率波动或电压幅值波动导致的对应有功功率或无功功率的变化量[3].VSG暂态稳定性是指电力系统遭受暂态扰动时保持同步的能力[7].传统方法通常通过调节参数Dp或J来提高系统的暂态稳定性.文献[8-9]详细分析了VSG功角特性,据此提出了调节参数J来改善暂态稳定性的原则,并利用Lyapunov定理证明了系统稳定性,但文中并未给出J的具体数学描述形式.文献[10-11]通过对分布式电源小信号模型的分析,确定了自适应参数J的选取原则.文献[12]采用了模糊控制的思想实现了参数J的自适应调节.上述文献仅从虚拟转动惯量J的角度出发,忽略了阻尼下垂系数Dp对于抑制系统暂态振荡的贡献.文献[13-14]分析了Dp对系统的影响,提出根据频率波动,自适应调节Dp的方法,并通过小信号模型证明了该算法可以有效的减小功率超调以及调节时间.文献[15]利用输出功率的偏差作为反馈,自适应地调节系统的阻尼因子.文献[16-19]综合考虑了参数J和Dp对于系统暂态稳定性的贡献,给出了两个参数的选取原则.在此基础上,文献[20]采用粒子群优化算法,以频率偏差和电压偏差为性能指标函数,得到J和Dp的优化值,并利用Lyapunov直接法对系统的暂态稳定性进行了分析.文献[21]综合考虑超调量和调整时间等暂态指标,建立虚拟同步发电机暂态响应的模型,提出VSG控制参数J和Dp的自适应调节策略.不同于上述文献,文献[22]在详尽分析有功功率和频率振荡过程的基础上,提出了暂态各阶段虚拟角加速度的最优判据,以改善功率和频率的暂态响应.
综上可见,目前参数自适应控制主要有3种:J自适应调节、Dp自适应调节、J/Dp自适应调节.这些控制方案均是基于VSG功角特性曲线,通过改变J及Dp优化暂态过程.主要存在两大问题:第一,现有方法存在较大功率响应超调,电力电子变换器中的元器件将承受较大的暂态冲击,对变换器可靠性和寿命产生不良影响;第二,自适应参数J/Dp调节范围大.J对应的物理实体为储能单元,J变化越大对储能单元的变化量要求就越高[23].此外,J越大,在有功调压控制环路截止频率处造成的相角滞后就越大,系统相角裕度就越小[5-6];因此,J过大容易引发系统的功角振荡[24-28].
为解决这一问题,本文提出利用输出速度反馈控制调节系统阻尼的方法,在分析VSG暂态响应过程的基础上,提出了利用速度反馈系数和虚拟转动惯量自适应调节系统暂态响应,动态过程中保证频率变化不超过阈值,抑制功率超调.同时,J的调节量相对现有方法大幅度减小.最后,通过对比实验验证了所提控制算法的有效性和优越性.
本文后面内容如下安排:第2节介绍VSG基本原理,分析通过输出速度反馈控制实现系统阻尼调节;第3节在分析功角暂态调节过程的基础上,设计了VSG自适应控制方法;第4节进行实验对比分析,验证所提方法的正确性和优越性;第5节给出结论.
2 VSG基本原理
VSG工作在并网模式下,可以等效为一个理想电压源与输出阻抗串联的模式,如图1所示.
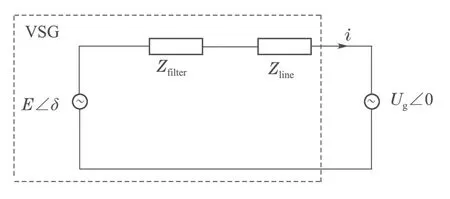
图1 VSG等效模型Fig.1 VSG equivalent model
图1中:E为VSG励磁电动势,Ug为电网相电压,Zfilter为滤波阻抗,Zline为线路阻抗,i为并网电流.
VSG在并网条件下受大电网的牵制,故以电网电压为参考Ug∠0,定义逆变器的输出相电压为E∠δ,其中δ为两个电压相量之间的相位差,即功角,表达式为

式中:ω0为电网电压角速度,ω为虚拟同步机角速度.

式中:Z为系统阻抗包含两部分,即滤波阻抗Zfilter和线路阻抗Zline;r表示其中的阻性成分;X表示其中的感性成分,阻抗角α=tan-1(X/r).
故VSG输出视在功率S可表示为
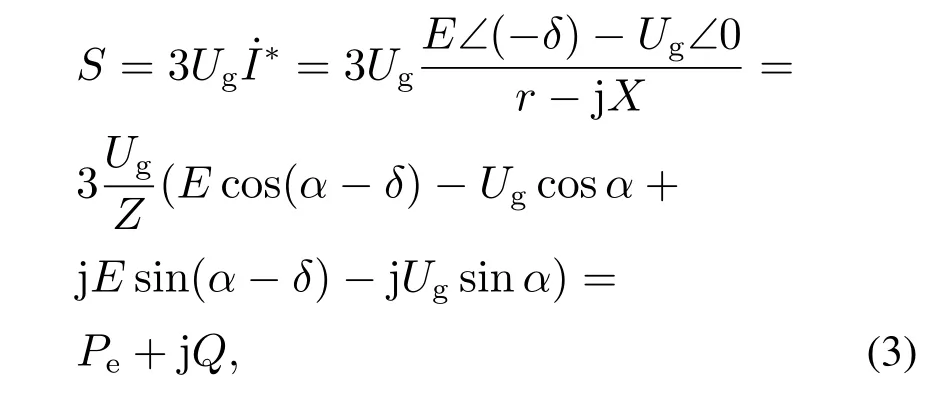
式中“*”表示共轭.
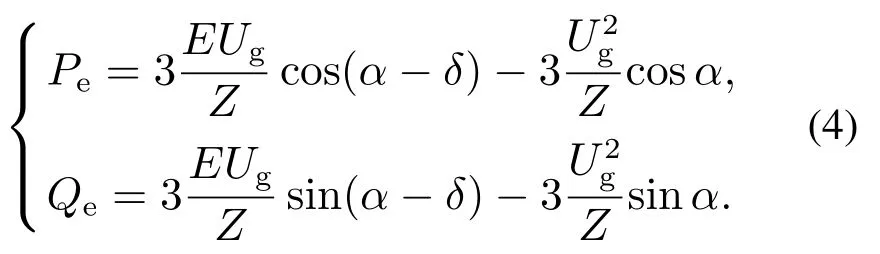
由式(3)得,VSG输出有功功率Pe和无功功率Qe分别为
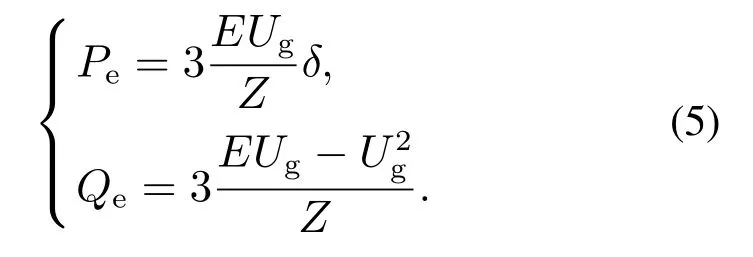
一般情况下,线路电抗呈感性,即α ≈90°,且同步发电机功角δ小于30°,可认为sin δ ≈δ,cos δ ≈1,
则式(4)可化简如下:
2.1 有功控制环路
VSG没有转子环节,通过控制构造摇摆方程,实现系统功率调节,表达式如下:

其中Tm和Te分别为同步发电机的机械转矩和电磁转矩.又因为
方程两边同时乘以电网角速度ω0,得

采用小信号建模分析的方法,可以得到VSG有功功率-频率控制环的结构图,如图2所示.
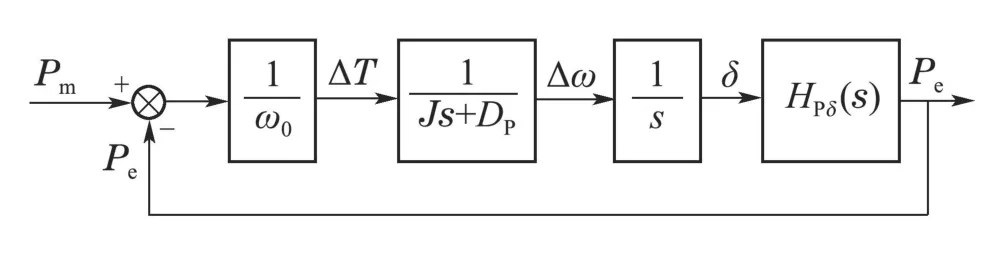
图2 VSG有功功率控制环框图Fig.2 VSG active power control loop diagram
图中HPδ(s)表示有功功角传递函数,由式(5)可知

有功功率控制环的开环传递函数:

系统阻尼比为
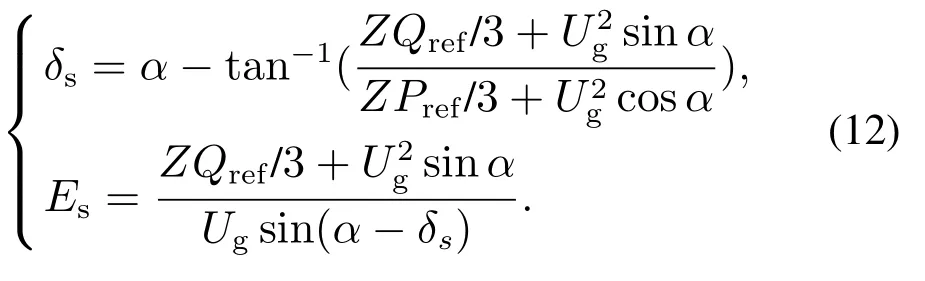
系统参数设置如表1[5-6]所示.稳态情况下,VSG输出的有功功率Pe和无功功率Qe分别与其指令值Pref和Qref相等,则可以根据式(4)得到系统稳态解:
计算可知,有功功率控制环路的截止频率为8.31 Hz,在两倍工频的1/10以内,能有效抑制瞬时有功功率的脉动量对输出电压频率和相角的影响.同时,相角裕度为66.48°,具备较好的抗扰能力.
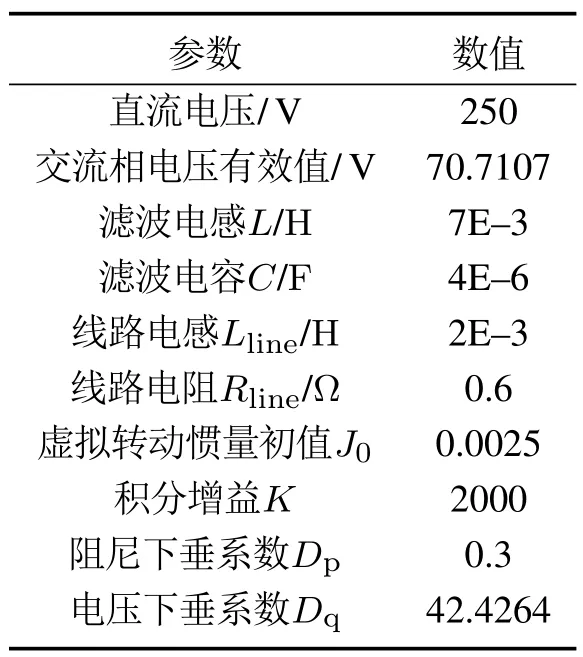
表1 主要仿真参数Table 1 The main simulation parameters
根据式(11),系统阻尼可以通过虚拟转动惯量J或参数Dp进行调节.但存在的问题是:参数J和Dp受限于储能设备容量,调节能力有限,若仅依赖J调节限制暂态过程中频率变化的范围代价太大(瞬时所需储能裕量大).此外,虚拟转动惯量过大,可能引发功角持续振荡[24-28];若仅依赖Dp调节同样存在调节范围大的问题:虽然同时调节J和Dp的方法充分利用了参数特性,一定程度上缩小了调节范围,但效果并不明显且参数匹配复杂.针对这些问题,本文提出通过输出速度反馈增益调节系统阻尼.将输出量的微分信号采用负反馈形式反馈到输入端并与误差信号相比较,可以改变整个系统等效阻尼,从而调整系统动态过程,改善系统平稳性,同时可以提高系统相角裕量.增加输出速度(微分)反馈后,系统框图如图3所示.
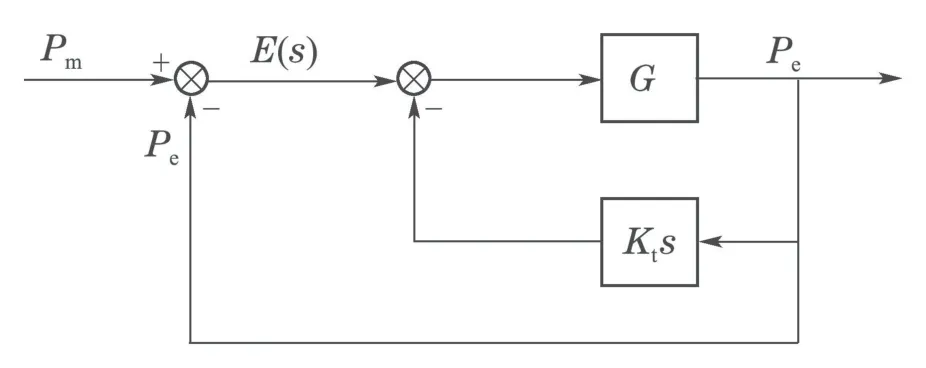
图3 输出速度反馈控制框图Fig.3 Block diagram of output speed feedback control
此时系统闭环传递函数表示为
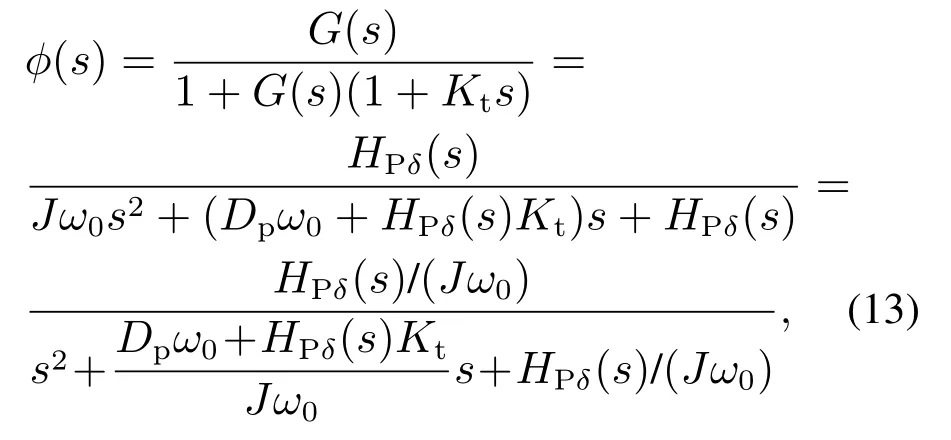
系统的无阻尼自然振荡频率ωn以及阻尼比ζ为
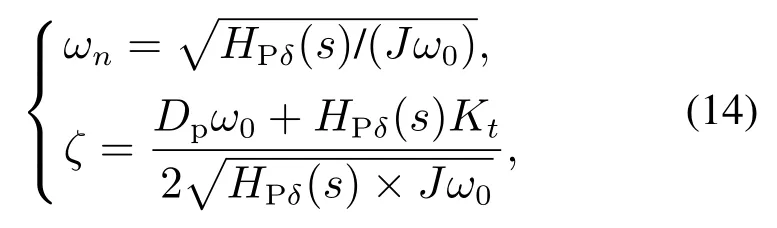
可见,通过改变Kt和J可实现闭环系统阻尼的调节.
根据式(14)可计算出速度反馈系数Kt.

2.2 输出速度反馈对系统性能的影响
将原系统开环传递函数式(10)化成标准I型系统:
可知,相角裕量γ随着速度反馈系数Kt的增大而增大.
根据式(17)计算可知,原系统截止频率fc0处的幅值:

求解式(21)可得

加入速度反馈后,系统截止频率fc,根据式(19)可得

求解式(23)可得

综上所述,如果Kt>0,系统的相角裕量就有所提高,有利于改善系统的平稳性.同时,系统截止频率降低,保证了系统对功率脉动的抑制能力.
进一步,原系统开环增益与加入输出速度反馈后系统开环增益之比为
选择表1的参数信息计算可知,原系统开环增益是加入速度反馈后开环增益的1.8倍左右,而且I型系统,对阶跃输入的稳态误差为0,因此,加入输出速度反馈后对稳态性能影响不大.
此外,为了进一步降低微分反馈的影响,VSG本体参数设计,保证了系统较低的截止频率[5-6],有效的衰减高频噪声.选择表1的参数,设定系统阻尼ζ=1.1,根据式(9)(12)(15)可计算参数Kt=0.01,绘制原系统有功功率-频率控制环和加入输出速度反馈作用后系统的Bode图,如图4所示.
可知,输出速度反馈的作用使得系统相角裕度提升,为79.28°.同时,系统截止频率为5.68 Hz,在两倍工频的以内,充分的抑制了系统功率的脉动量及输出微分反馈可能引入的高频噪声的影响.
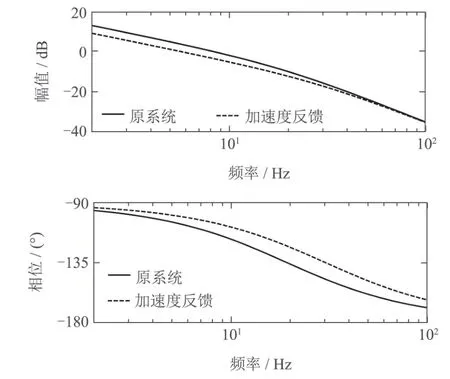
图4 原系统与加入输出速度反馈控制后频率特性对比Fig.4 The frequency characteristic comparison between the original system and the system incorporated in speed feedback control
3 VSG自适应控制
3.1 J与系统暂态稳定性的关系
本文采用J和Kt同时调节来避免需要大储能储备量和调节动态过程中Dp的变化.引入速度反馈后VSG的摇摆方程可表示为
3.2 VSG扰动暂态响应过程分析
当功率扰动打破功率平衡时,依据“有功调频”的同步机制,VSG自主调节输入功率Pm,使系统重新恢复平衡,暂态调节过程示意图如图5所示,图(a)为VSG功角与输入功率之间的关系,图(b)为调节过程中频率变化曲线示意图.
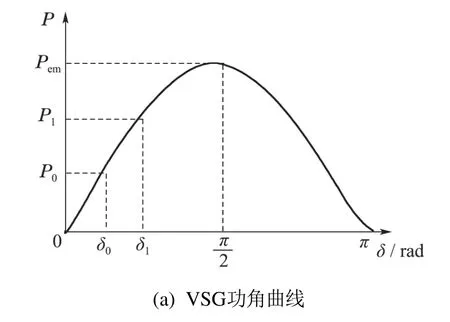
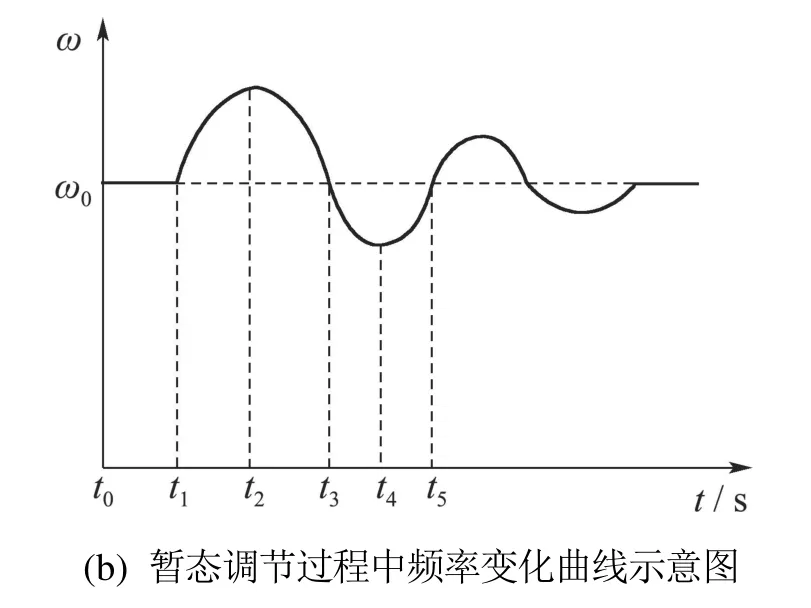
图5 VSG功角曲线和暂态过程频率变化曲线示意图Fig.5 VSG power angle curve and frequency variation
VSG暂态调节过程及其功角特性具体分析如下:
t0-t1阶段:VSG 输入有功功率Pm=P0与输出电磁功率Pe基本相等,即P0≈Pe,ω ≈ω0,≈0,系统处于平衡状态.
t1-t2阶段:功率扰动使得输入功率Pm跃变为P1,而电磁功率Pe瞬时不变,造成功率不平衡现象,即Pm=P1>Pe=P0.此时,Δω=(ω-ω0)>0,>0,可见,在这个阶段,频率偏差为正,同时,频率变化率也为正,意味着频率偏差正在向增大的方向变化,此时,如果频率变化率绝对值也较大,则通过增加J来减小频率变化率,抑制频率(和频率偏差)的增加.因此,虚拟转动惯量J的调节规律为
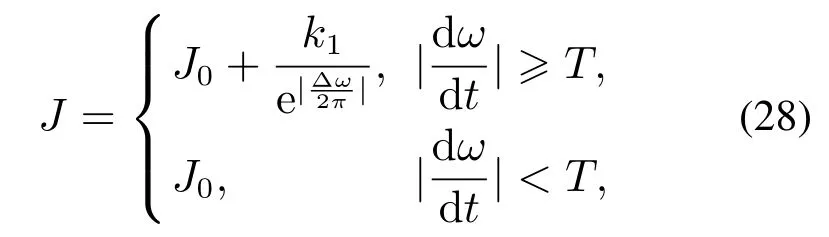
式中:J0为虚拟转动惯量初值;=Δf为系统频率相对于电网频率的偏离程度;T是为了防止J频繁调节而设置的虚拟角速度变化率阈值;k1为调节系数,可按式(29)计算.

式中:Δfmax为系统频率变化的允许阈值,依据国家标准GB/T15945-2008《电能质量电力系统频率允许偏差》的规定[29]:电力系统正常运行情况下,频率偏差范围为±0.2 Hz.若微网系统的装机容量较小时,可以放大余量,可允许频率偏差值为0.5 Hz,本文设置Δ|fmax|=0.5 Hz,式(29)中k1的设置可以保证J最大为Jmax.
虚拟转动惯量J越大,动态性能越差,且在截至频率处造成的相角滞后越大,导致系统的相角裕度减小,甚至可能引发VSG功角的持续性振荡.本文增加了输出速度反馈控制,可以不用J过大调节就可以实现较强的频率调节能力,因此,Jmax偏离J0的设置可比单纯采用虚拟转动惯量调节的范围小得多,从而降低储能容量改变量.
t2-t3阶段:Δω >0,<0,虚拟角速度ω处于减速状态.此时,可以不做调节,保持频率自然趋近期望值便可,但考虑到如果趋近过程中频率变化率绝对值过大导致振荡次数增加,因此,在频率变化率绝对值过大时,减小虚拟转动惯量J,使得负的(小于0的)角速度变化率向值增大的方向(也是绝对值减小的方向)趋近于0.因此,J的调节规律为
k2为调节系数,取值由式(31)确定:

Jmin不应该偏离J0太远,因为,偏离J0太大将导致较大的角速度变化率阻碍频率趋稳.由于输出速度反馈作用,使得J的调节可以很小,对应储能容量的变化量相应较小,减小了在标称虚拟转动惯量对应的储能容量基础上需求的储能变化量.
t3-t4阶段:Δω <0,<0,与t1-t2阶段类似,虚拟角速度ω处于加速阶段. J的调节方式与t1-t2阶段一致.
t4-t5阶段:Δω <0,>0,类似于t2-t3阶段的控制要求,J的调节方式与t2-t3阶段一致.
下面分析阻尼的参数自适应规律.暂态调节过程中,为了保证系统功率不出现明显超调,同时,缩短暂态调节时间,设置系统阻尼ζ=1.1,对应速度反馈系数Kt的计算可由式(9)(12)(15)得到.但应注意以下两种情况:
第1种情况:当系统频率变化大于频率阈值,即|Δf|>Δfmax=0.5 Hz时,为了抑制频率增长,设置频率变化率=0,根据式(27)可计算:
第2种情况:当系统频率变化在安全阈值内时,即|Δf|≤Δfmax=0.5 Hz,如果>T说明频率波动较大,采用速度反馈系数增大系统阻尼,设置ζ=1.3使系统频率尽快平稳.
综上所述,本文提出的VSG参数自适应控制规律如下:
如果Δω <2πΔfmax,
Kt的计算可由式(9)(12)(15)得到,其中系统阻尼的选择如式(34):
否则,如果Δω >2πΔfmax:
经过上述各阶段调控后,系统功率达到新的平衡状态.
3.3 VSG参数自适应稳定性分析
加入输出速度反馈控制后,系统闭环传函如式(13)所示,可得系统特征根为
又因为Jω0>0,所以s1,2在s平面的分布主要由分子决定.如系统稳定,则参数A >0,即Dpω0+>0,可得
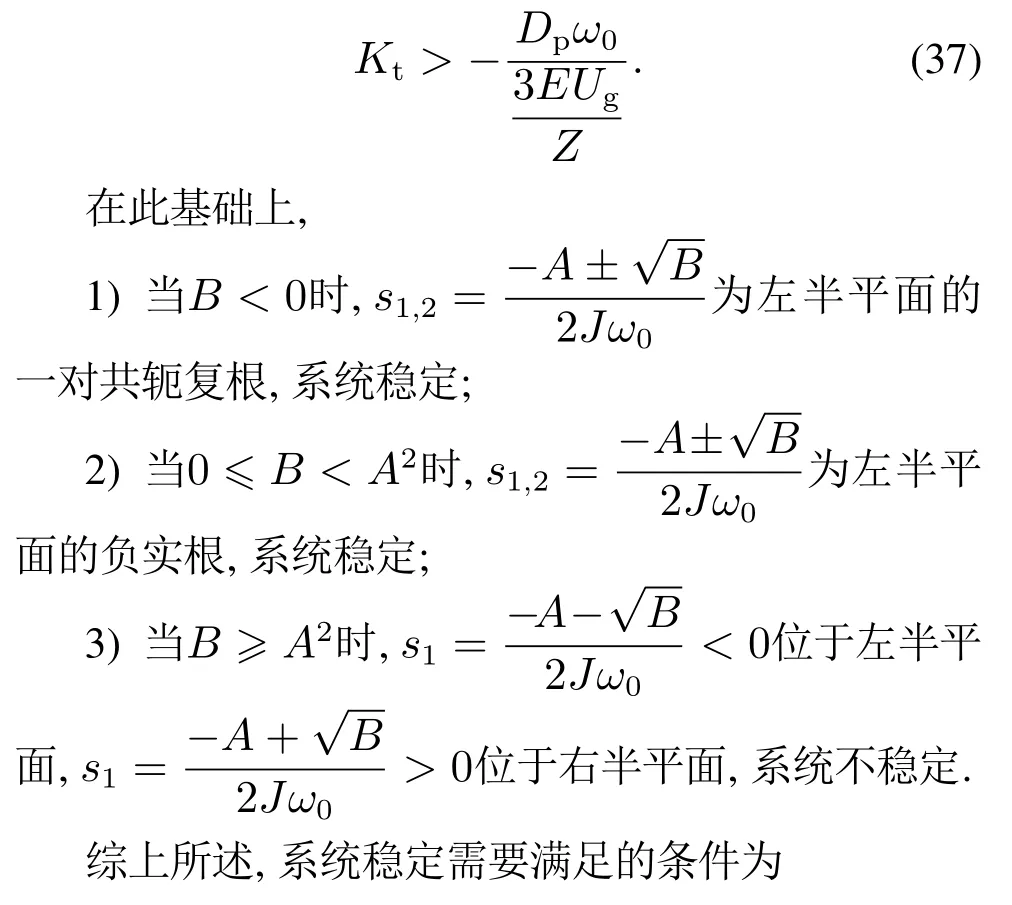
显然,自适应控制过程中J >0可以得到保证,而Kt的取值有两种情况分析如下:
a) Δω ≤2πΔfmax时,
系统满足稳定条件;
b) Δω >2πΔfmax时,
根据阻尼下垂系数Dp的定义[2-3]:

其中Pe0表示扰动前的VSG功率.
根据式(1)和式(5)得

若满足系统稳定条件,则有

将上述不等式右边移到左边,同时将等式(40)代入,得到
注意到本情况是系统频率产生波动越限时的控制,此时有两种情况:第1种情况是系统频率正向超过额定阈值,此时有
由式(44)可知,式(43)分母大于0,不等式(43)只要其分子多项式大于0即可,将式(41)代入(43)分子多项式,得到分子多项式大于零的条件是
上式第2项和第3项抵消,于是得到稳定条件为

由式(44)可见,上式恒成立,即此时系统稳定.
另外一种情况,当频率小于额定值越限时,式(44)中所有大于号变为小于号,类似推导可以得到相同结论,至此,参数自适应调节过程中的稳定性得到证明.
相较于传统的恒定阻尼和恒定虚拟转动惯量控制来说,系统不能瞬时从初始点变化到新的平衡点,当加速面积超过减速面积时,就会发生暂态失稳[7].自适应控制针对系统暂态不同阶段的响应特点,提出了分阶段实时调控的控制策略,不仅提高了系统暂态稳定性,增强了系统鲁棒性,同时,提高了系统动态性能.本文提出的自适应控制策略特点是:一方面,通过速度反馈控制使系统阻尼调节不再仅依赖于阻尼下垂系数Dp和虚拟转动惯量J的大范围调节,抑制了系统功率超调,同时,缩短了暂态调节时间;另一方面,通过速度反馈系数的自适应调节限制了动态过程中系统频率变化阈值,有效避免了VSG动态调节过程中,因频率变化越限而脱网.
4 实验验证
为了验证上述理论分析的正确性,实验室搭建了搭建了TMS320F28335数字控制器为核心的三相逆变器样机,逆变器输出通过变压器与电网相连,样机参数如表1所示.开关管选用IGBT模块FF150R12RT4,开关管驱动芯片选用1EDI60I12AF,逆变器侧电感电流信号通过电流霍尔CSNE151-100采样,电容电压及电网电压信号通过电压霍尔HNV025 A采样,实验装置如图6所示.实验控制周期为200 μs,逆变器开关频率为10 kHz.
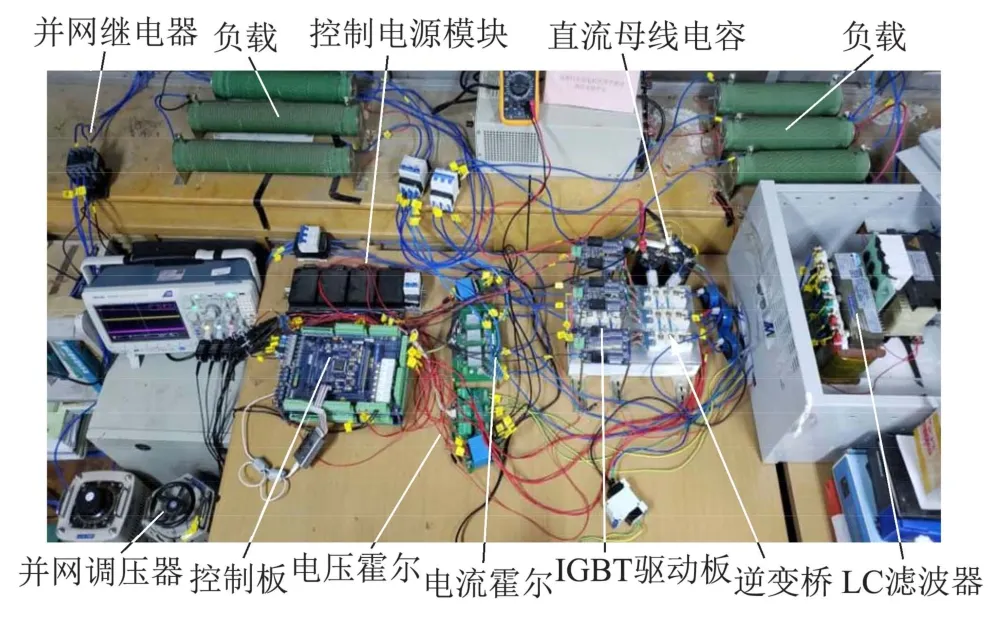
图6 实验平台Fig.6 Experiment platform
实验设置:VSG系统初始有功功率为157 W、无功功率为0 var,6 s时,有功功率变为600 W,无功功率保持不变,实验结果,如图7-9所示.其中:J自适应控制为文献[8-9]的方法;Dp自适应控制为文献[13]的方法;J和Dp参数自适应控制为文献[16]的方法.
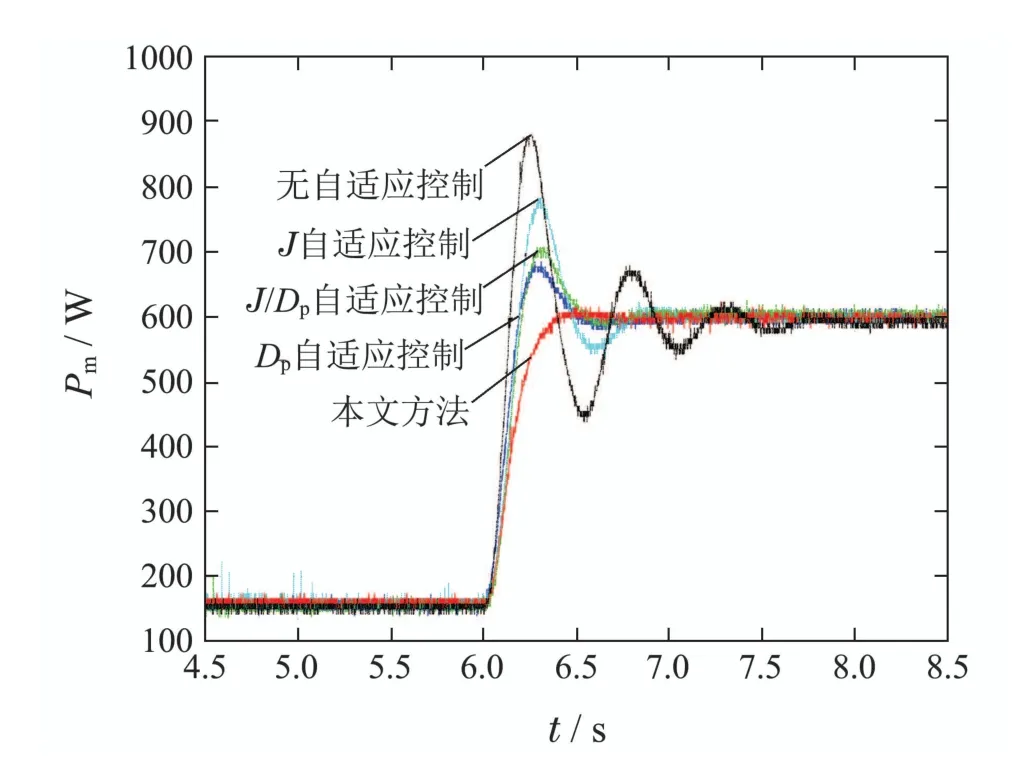
图7 VSG不同控制策略的功率响应Fig.7 VSG power responses of different control methods
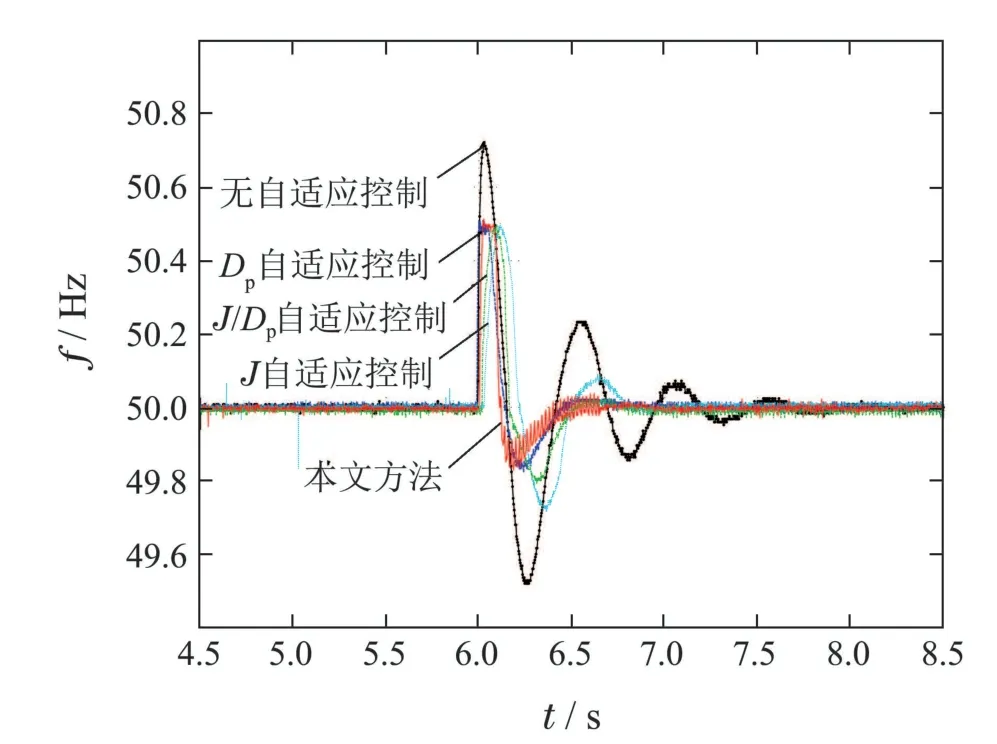
图8 VSG不同控制策略的频率响应Fig.8 VSG frequency responses of different control methods
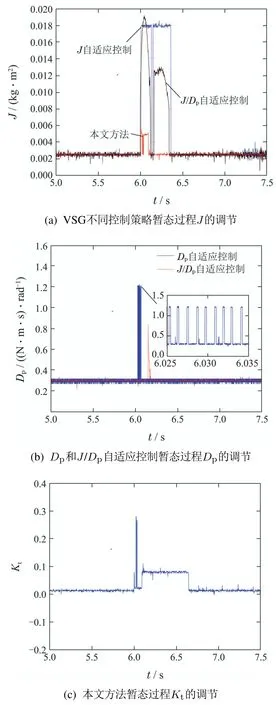
图9 VSG不同控制策略的参数调节曲线Fig.9 Parameter adjustment curve of different control strategies
图7和图8是本文方法和现有各种方法调节过程和稳态的功率变化和频率变化曲线.从实验结果可知,J/Dp恒定的方法在功率波动时,暂态过程功率超调高达50%,调节时间1.5 s,且系统频率瞬时超出安全工作限定的0.5 Hz,导致VSG脱网,不利于系统稳定.采用J自适应控制,系统频率波动和功率超调在一定程度上得到改善,但功率超调依然明显,同时由图9(a)可见,采用J单独调节,J的变化范围较大;采用Dp自适应控制,当且仅当系统频率超过阈值时,增大阻尼下垂系数Dp限制频率波动,图9(b)中可见这种方法对应的Dp快速振动,不利于实际调节;采用J和Dp同时自适应调节,性能有所改善,但仍存在上述问题,相对于本文方法,其动态响应时间长,且J/Dp调节的瞬时值也较大.采用本文的控制方法,系统工作在过阻尼状态,功率超调得到抑制,同时,系统频率波动范围被限制在0.5 Hz范围内,且能够快速恢复稳定,改善了系统暂态过程.
图9为对比的几种方法参数的调节曲线,其中子图(a)为3种需要调节J的方法对应的J的变化曲线,子图(b)为Dp,J/Dp自适应控制调节过程中Dp变化曲线,子图(c)为本文方法输出速度反馈系数Kt的变化曲线.由子图(a)可知,为了限制频率阈值,J自适应控制策略需要提供的虚拟转动惯量最大值为0.019,是初值的7.6倍;J/Dp自适应控制策略需要提供的虚拟转动惯量最大值也高达0.018;而本文方法需要提供的瞬时虚拟转动惯量峰值仅为0.0056,可见本文自适应控制方法需要的虚拟转动惯量调节裕量最小,而且调节时间明显缩短;由子图(b)可见,采用Dp自适应控制或J/Dp自适应控制策略时,所需的阻尼下垂系数变化范围较大,其瞬时最大值为别达到了稳态值(Dp0=0.3)的4和2.8倍,这将对系统提出更高的储能容量储备要求;由子图(c)可见,开始阶段系统阻尼维持在ζ=1.1,速度反馈系数Kt变化趋势与子图(a)本文方法中J的变化趋势一致.当系统频率超过0.5 Hz时,J 减小,Kt增大,根据式(15)系统阻尼得到了增加,限制了频率变化超过阈值;随后,较高的Kt值有效的减弱了频率的偏离程度,最终,当系统进入稳态时Kt恢复为初值.
综合以上实验结果,对比现有3种不同的参数自适应调节方法实验中得到如下结论:
1) J自适应调节,为了动态过程平稳,所需J的瞬时值增大,导致系统阻尼降低,从而进入欠阻尼状态,出现功率超调,实验结果如图7和图9(a)所示.
2) Dp自适应调节,增大Dp可以实现系统过阻尼,但是Dp的增大仅发生在频率超过设定值的时候,一旦频率降至设定值内则取为初值,调节过程如图9(b)所示,无法保证系统始终处于过阻尼,功率响应也存在超调,如图7所示.
3) J/Dp自适应调节,实验结果如图9(a)和(b)所示,暂态调节过程中J和Dp同时调节的过程中无法有效保证系统处于过阻尼状态从而导致系统出现超调,从功率响应结果图7也可得到证实.
本文方法的优点是抑制了功率超调,限制了暂态频率变化的阈值,同时具有良好的响应速度.
5 结论
VSG技术使得利用电力电子变换器接入电网的新能源发电系统能自主参与电网一次调频,提高了系统的频率稳定性.现有VSG自适应控制策略在不考虑储能限制的条件下,充分利用虚拟转动惯量或阻尼下垂系数灵活可调的特点,优化暂态性能,但现有方法仍存在参数调节范围大,调节时间长,暂态超调大,容易造成VSG脱网的问题.针对这些问题,本文提出一种基于输出速度反馈的VSG自适应控制策略.主要贡献如下:
1) 采用输出速度反馈控制调节系统阻尼,使系统工作在过阻尼特性下,避免储能设备频繁重复充放电,同时,避免功率超调对电力设备造成不良影响.调节过程中限制虚拟转动惯量的调节范围,从而不需要过大的储能容量储备就可以达到改善VSG动态调节性能的目的.
2) 分析VSG功角特性曲线和瞬态调节过程的基础上得出新的VSG自适应控制原则,能够抑制动态过程的功率超调,加快调节过程,同时限制了动态调整过程中频率的波动范围,保证了动态过程中VSG不会因频率超限而脱网.
