反空空导弹弹道及拦截区解算研究
2021-01-06胡朝晖
胡朝晖,吕 跃
(1.西京学院 机械工程学院,陕西 西安 710123;2.空军工程大学 航空工程学院,陕西 西安 710038)
在空战过程中,当自卫飞机发现遭到空空导弹攻击后,可通过机动规避飞行和电子干扰等自卫手段,摆脱导弹的攻击。在机载武器装备快速发展的今天,作战飞机受到的威胁与日俱增,特别是随着隐身空战时代的到来,空战中被锁定的战机将更难于摆脱导弹的攻击。为此,一些国家和学者提出了自卫飞机发射空空导弹拦截来袭空空导弹的设想,旨在采用积极的自卫手段,提高自卫飞机的生存能力。美军启动的“CUDA”迷你导弹项目,就是在未来专门拦截来袭的空空导弹,俄军也称其新型中程空空导弹K-77M能够全向拦截各型对空来袭导弹[1-4]。
因此,对反空空导弹的拦截特性及其拦截区的研究具有非常重要的意义。文中建立了来袭导弹攻击自卫飞机和反空空导弹拦截来袭导弹的空战仿真平台,在典型空战条件下,进行了反空空导弹拦截来袭空空导弹的弹道仿真,并对反空空导弹的拦截区进行了计算,对拦截区的影响因素进行了分析。
1 反空空导弹拦截原理分析
如图1所示,在来袭导弹进入反空空导弹的拦截区后,发射反空空导弹拦截来袭导弹是一种重要的积极自卫手段。
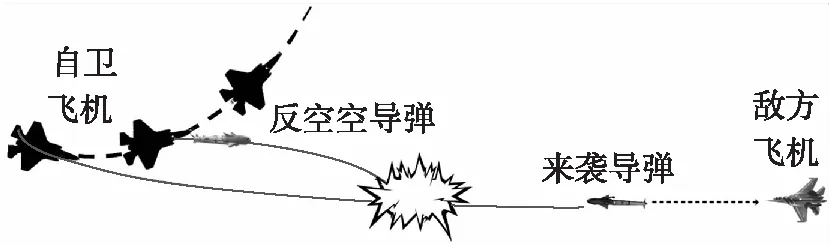
图1 反空空导弹对来袭导弹的拦截过程
通过分析可以发现,反空空导弹和空空导弹的区别非常大,主要体现在:
①攻击目的不同。空空导弹重点在于“攻”,其首要任务是击落敌机,而反空空导弹重点在于“防”,保护自卫飞机,提高载机的生存力。
②目标反制措施不同。空空导弹攻击的飞机目标会通过各种机动规避措施和电子对抗手段干扰空空导弹的攻击,而来袭导弹目标没有反制机动能力,只根据自卫飞机的运动情况,按照引导规律一直朝向自卫飞机机动飞行。
③目标速度特征不同。空空导弹一般只拦截马赫数在2.5以下的空中目标,而反空空导弹需要拦截马赫数可达4以上的来袭空空导弹,且基本是迎头攻击,要具备一定的高速目标拦截能力。
④目标探测特征不同。来袭导弹飞行时发动机不是全程工作的,但由于速度较高,蒙皮是其主要红外辐射源,而飞机的发动机一直工作,其尾喷口和尾焰红外辐射是其主要辐射源。来袭导弹目标的雷达反射截面积(RCS)大致相当于隐身飞机大小,而飞机目标的RCS从隐身飞机的0.01 m2到大飞机的几十平米。
综上分析,自卫飞机要成功拦截来袭导弹,首先要对来袭空空导弹有一定的探测能力,即在一定的距离能够发现、跟踪和瞄准来袭空空导弹,同时发射的反空空导弹也具有探测跟踪红外小目标或者隐身目标的能力。得益于机载武器装备的快速发展,一些作战飞机可通过装备光电分布式孔径系统(EOTAS)探测来袭导弹,并引导光电跟踪瞄准系统(IRST)或者机载有源相控阵雷达稳定跟踪空空导弹。
2 反空空导弹拦截建模
反空空导弹本质上仍是空空导弹,要研究其是否能够实现拦截导弹任务,需要建立来袭导弹攻击自卫飞机和反空空导弹拦截来袭导弹两部分模型。为使拦截区概念更直观清晰,对来袭空空导弹拦截区的解算应以自卫飞机为中心解算,并综合分析自卫飞机、反空空导弹和来袭导弹参数变化对拦截区的大小和形状的影响,为自卫飞机火控系统实现反空空导弹发射控制提供数据支撑。
为简化计算,仿真平台采用标准大气计算气动参数,并设空战在同一水平面发生,来袭导弹为敌方飞机发射的中距空空导弹,反空空导弹为改进的红外近距格斗导弹。
2.1 坐标系的建立
为实现反空空导弹的弹道仿真,需要建立相应的坐标系。
①取敌方飞机在攻击区内发射来袭导弹的瞬间为坐标原点O,建立地理坐标系Oxz,令Ox为发射导弹瞬间敌方飞机和自卫飞机的连线。
②取自卫飞机发射反空空导弹的瞬间位置为坐标原点O1,建立反空空导弹地理坐标系O1x1z1,取O1x1轴为发射导弹瞬间自卫飞机和来袭导弹的连线。
图2为基于来袭导弹和反空空导弹的2个地理坐标系。图中,d1为自卫飞机探测跟踪来袭导弹的最大距离,d0为来袭导弹的发射距离。
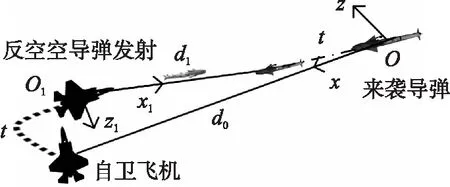
图2 来袭导弹及反空空导弹的地理坐标系
为实现自卫飞机、来袭导弹和反空空导弹三者之间的坐标系关联,需要确定Oxz和O1x1z1的平移和旋转关系[5],如图3所示,则来袭导弹在地理坐标系O1x1z1的位置坐标为
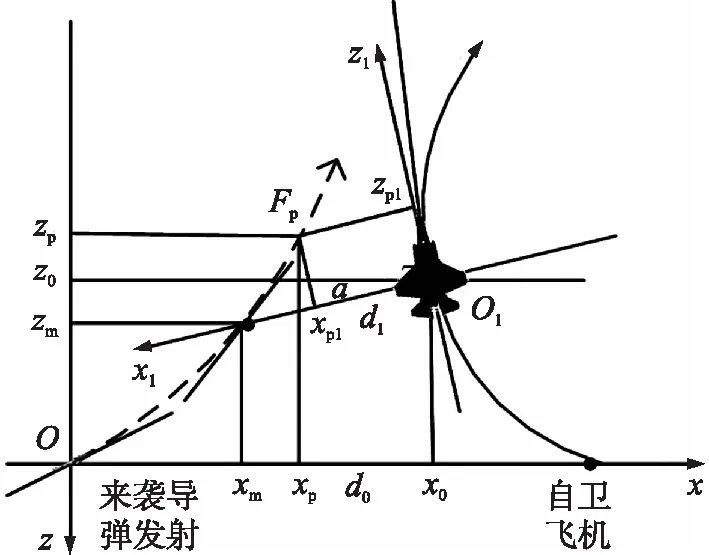
图3 两坐标系的转换
(1)
式中:x0和z0为原点O1在地理坐标系Oxyz中的坐标。
2.2 自卫飞机的运动模型
自卫飞机在水平面内实施机动飞行,其飞行速度大小保持不变,只可改变飞行方向,这样自卫飞机就可以实施匀速直线、匀速转弯和置尾机动等规避运动。自卫飞机在地理坐标系O1x1z1的位置为
(2)
式中:d为自卫飞机和来袭导弹的距离;ψf为自卫飞机的偏航角,其初值称为目标进入角,当已知自卫飞机的过载n和速度vf时,可计算自卫飞机的偏航角变化率为
(3)
式中:g为重力加速度。
2.3 来袭导弹的运动模型
来袭导弹要计算从d0开始的整个飞行速度变化,并按照比例引导律机动攻击自卫飞机。
①来袭导弹的速度模型。
(4)
式中:m为导弹的质量;vm0为敌方飞机速度;Fp为来袭导弹的推力,任意高度的导弹推力可根据海平面推力、发动机总冲、燃料消耗率和每牛顿推力的燃料消耗量等参数修正计算;Cx为导弹阻力系数;S为导弹气动参考面积;pd为动压。
②来袭导弹的比例引导律[6-8]。
(5)
式中:θ为来袭导弹速度矢量与坐标轴Z的夹角;q为目标视线角。
③来袭导弹和自卫飞机的距离。
(6)
2.4 反空空导弹弹道仿真建模
①反空空导弹动力学方程。
(7)
式中:m1为导弹质量;Fp1为反空空导弹发动机推力;Fx1为轴向阻力;v1为反空空导弹速度。反空空导弹的推力、气动阻力和法向力为
(8)
式中:Q为发动机总冲;Ca为弹体轴向阻力系数;S1为导弹气动参考面积;pd为动压;Fz1为法向力;Cnd为法向力系数。
②反空空导弹与来袭导弹相对运动模型。
(9)
式中:xm1和zm1为反空空导弹与来袭导弹目标相对位置在地理坐标系O1x1z1的分量;dm1为距离;ψG为偏航方向上的跟踪角。
③反空空导弹的制导模型。
反空空导弹的制导分为2个阶段:初始段和末制导段。初始段导弹不制导,完成导弹的引信解除保险,并安全脱离自卫飞机。末制导段采用比例导引规律制导:
(10)
式中:qG为跟踪线相对于偏航方向的旋转角速度;nz为导弹法向过载分量;az,vd为所需法向加速度分量。
④反空空导弹的运动模型。
(11)
式中:x1,z1为反空空导弹的坐标;v1为反空空导弹的速度;ψc为导弹航迹偏转角。
2.5 空战仿真平台的搭建
空战仿真平台由反空空导弹攻击来袭导弹的弹道仿真模块和来袭导弹攻击自卫飞机模块组成,具体结构如图4所示。

图4 空战仿真平台结构框图
仿真前要设置空战高度、自卫飞机速度及过载、自卫飞机对来袭导弹的最大跟踪距离、反空空导弹发射前置角、反空空导弹发射时间、来袭导弹的发射距离、自卫飞机目标进入角、来袭导弹发射前置角、敌方飞机速度等参数,并读入来袭导弹和反空空导弹的具体参数。
对于反空空导弹,当存在以下状态时导弹失控,不能完成对应拦截攻击任务:
①导弹速度低于最小可控马赫数;
②导弹飞行时间超过最大可控时间;
③弹目接近速度低于最小接近速度;
④视场限制导引头丢失跟踪目标;
⑤跟踪角速度限制导引头丢失跟踪目标;
⑥弹目接近速度大于最大相对速度限制。
当自卫飞机提前进入来袭导弹引信作用域时,来袭导弹毁伤自卫飞机,反空空导弹拦截失败;当来袭导弹提前进入反空空导弹引信作用域时,反空空导弹毁伤来袭导弹,拦截成功。
2.6 反空空导弹的拦截区解算
反空空导弹拦截区[9~11]的计算步骤如下:
①步骤1。针对来袭导弹目标特征,计算自卫飞机对来袭导弹最大探测范围,此为反空空导弹的远边界。
②步骤2。设置自卫飞机的高度、速度、机动方式,初始化来袭导弹和反空空导弹的各项参数。
③步骤3。来袭导弹在其攻击区内发射,开始弹道仿真,当距离小于自卫飞机可探测范围时,发射反空空导弹开始弹道仿真,并判断来袭导弹和反空空导弹的攻击状态,若反空空导弹首先命中目标,则减小反空空导弹发射距离,直至来袭导弹提前命中自卫飞机,得到反空空导弹最小发射距离。
④步骤4。改变反空空导弹发射前置角,重新计算步骤3。
⑤步骤5。在反空空导弹发射前置角范围内,计算得到反空空导弹最小发射距离的集合,即为拦截区的近边界。
3 仿真计算
仿真条件:设在3 km高度空战,自卫飞机可进行匀速直线运动或以5g过载进行匀速转弯机动。当敌方飞机在距自卫飞机25 km的攻击区内边界发射中距空空导弹时,自卫飞机通过机动可部分摆脱导弹攻击,在距自卫飞机13 km的不可逃逸攻击区中心位置发射来袭导弹时,自卫飞机仅靠机动规避无法摆脱来袭导弹的攻击。自卫飞机采用EOTAS探测来袭导弹,采用IRST系统瞄准来袭导弹,采用IR反空空导弹拦截来袭导弹[12],对马赫数在2.5以下的来袭导弹,有效探测距离均大于6 km,对马赫数在3以上的来袭导弹,探测系统作用距离均大于10 km。
3.1 空战平台的攻击弹道仿真
图5~图7为典型的迎头攻击态势下,空战仿真平台的弹道仿真结果。
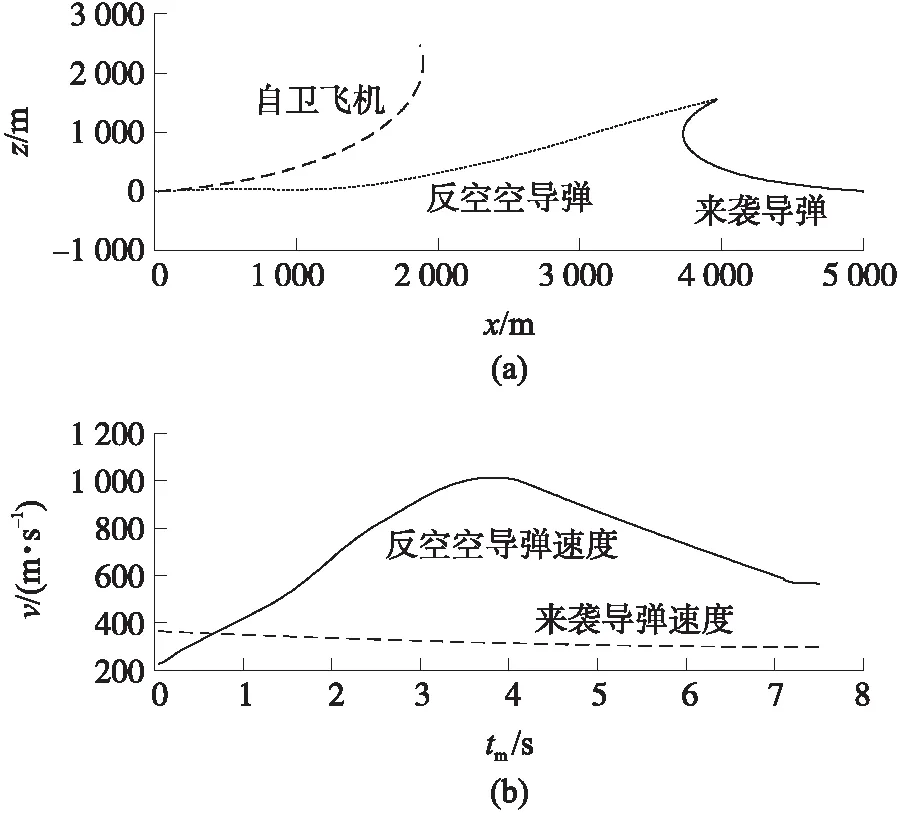
图5 反空空导弹成功拦截边界发射来袭导弹
图6 反空空导弹未成功拦截边界发射来袭导弹
图7 反空空导弹成功拦截中心区发射来袭导弹
图5和图6中的来袭导弹在25 km距离发射,自卫飞机在5 000 m距离发射反空空导弹,能够成功拦截来袭导弹,在距来袭导弹2 500 m时发射反空空导弹,由于距离过近,未能拦截成功,来袭导弹命中自卫飞机。图7为来袭导弹在距离13 km处发射攻击自卫飞机,在距来袭导弹7 000 m处发射反空空导弹,成功拦截来袭导弹的飞行弹道轨迹。
3.2 反空空导弹的拦截区
为使发射的反空空导弹能够可靠拦截来袭导弹,需要计算出来袭导弹的拦截区,以便空战时飞行员能够把握时机,在攻击区内发射反空空导弹攻击来袭导弹。图8为计算的典型迎头空战态势下,反空空导弹的拦截区。
图8 不同反空空导弹前置角下的拦截区
图8(a)为自卫飞机不机动,来袭导弹在距自卫飞机25 km处的攻击区远边界发射时,反空空导弹的可拦截区;图8(b)为自卫飞机以5g过载机动时,反空空导弹的可拦截区;图8(c)为自卫飞机不机动时,来袭空空导弹在距自卫飞机13 km的攻击区中心位置被发射,反空空导弹的可拦截区。
从解算出的反空空导弹拦截区可以看出:①反空空导弹对迎头攻击的中远距空空导弹存在有效拦截区。②拦截区的远边界主要受自卫飞机对来袭导弹的探测跟踪距离影响,拦截区的近边界主要受反空空导弹的性能影响,拦截区的侧边界主要受反空空导弹前置角限制。③自卫飞机的机动能够改变拦截区形状。④随着来袭导弹由攻击区边界发射向中心发射,其到达自卫飞机时速度增加,被自卫飞机探测的距离增加,反空空导弹不可拦截距离增加,造成拦截区“外移”的现象。
4 结束语
本文建立了自卫飞机、来袭空空导弹和反空空导弹的空战仿真平台,着重研究了迎头空战态势下反空空导弹拦截中远距空空导弹的问题,所得结论对提高作战飞机的自卫能力具有重要意义。
