亚轨道飞行器动力段制导技术研究
2021-01-04姜博文陈婷婷
姜博文,陈婷婷
(南京航空航天大学 自动化学院,江苏 南京 211106)
0 引言
亚轨道飞行器是一种在亚轨道空间飞行、可重复使用的多用途飞行器。相比于轨道飞行器,亚轨道飞行器具有系统结构和发射条件简单、飞行成本低等特点。亚轨道飞行器上升段的飞行过程可以分成动力段、无动力段,其飞行轨迹如图1所示。

图1 飞行轨迹示意图
动力段是指亚轨道飞行器从地面发射场垂直起飞到助推发动机关机或者燃料耗尽的飞行阶段。该飞行过程内,飞行器的速度、高度变化剧烈,动压、过载峰值大。因此,亚轨道飞行器动力段需要考虑动压和过载的约束,同时,在动力段结束时,飞行器需要满足速度、高度的窗口条件。
目前,国外对于飞行器动力段制导的研究起步较早,GARY J Balas等提出一种摄动制导的方法,其具体的方案是:首先确定一条动力段的标称轨迹,然后对此轨迹进行一阶线性展开,求出相应的制导方程。该方法具有计算量小、稳定性较好等明显优点,但是需要进行大量的数据分析和装订[1-2]。国内的吴家梁基于间接法进行了上升段轨迹优化方法研究,良好的轨迹优化方法是制导律设计的前提条件[3]。贺成龙介绍了动力段闭环制导中迭代算法的应用,加入最优控制理论,提出自适应迭代的制导方法,具有一定的可靠性[4]。
本文针对亚轨道飞行器上升过程中动力段面临的严苛约束条件及动力段结束时的窗口条件,在推力和气动力等不确定性因素的影响下,提出一种基于跟踪标称轨迹的高度跟踪制导律,并对跟踪效果进行仿真验证。
1 动力段制导问题描述
1.1 亚轨道飞行器质点运动学分析
本文主要描述亚轨道飞行器动力段纵向制导问题,将飞行器看作质点,仅考虑纵向质点运动,忽略横侧向的影响。假设飞行器为刚体模型,则其三自由度运动方程描述为:
(1)
其中:x=[H,V,γ];u=θ。忽略地球自转、哥氏力、惯性离心力的影响,简化的飞行器三自由度运动学方程如式(2)-式(4)所示。
(2)
(3)
(4)

图2是飞行器上升过程中有推力的情况下受力分析图。
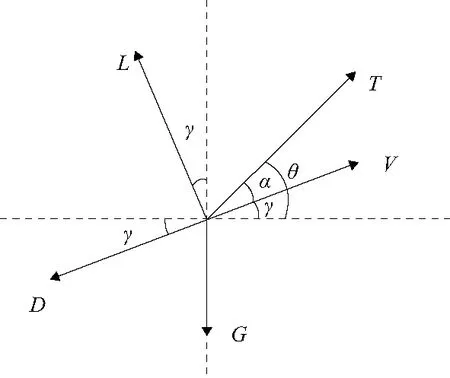
图2 动力段飞行器受力分析示意图

(5)
(6)

(7)
(8)
Fx=-Lsinα+Dcosα
(9)
Fy=Lcosα+Dsinα
(10)
式中α为迎角。
1.2 制导问题描述
本文主要研究亚轨道飞行器动力段的制导技术,即飞行器跟踪标称轨迹,在动力段结束时,需满足一定的速度、高度约束条件:整个动力段的动压不能过大。动压增大导致铰链力矩增大,为了避免执行机构上的铰链力矩过大而无法操控,需要限定动压的最大值[5],即有
(11)
对于样例飞行器,动压最大值限定为32 000 Pa。
由于飞行器的结构和强度限制,动力段的过载不能太大,而过载的约束主要体现在法向过载的约束上。过载nz的约束条件为
nz≤2g
(12)
动力段的制导目的是在不同的环境条件下,飞行器都可以跟上标称轨迹,并且在动力段结束时,飞行器的高度、速度状态满足高度、速度的约束条件。即:
Mamin≤Ma≤Mamax
(13)
Hmin≤H≤Hmax
(14)
H=f(Ma)
(15)
根据要求,动力段结束时高度、速度的约束条件可以近似线性化表示为:
Ma=3.5,H=26~29 km
(16)
Ma=4.0,H=29~32 km
(17)
Ma=4.5,H=32~35 km
(18)
根据上述约束条件,给出亚轨道飞行器动力段的标称轨迹和高度、速度构成的约束窗口如图3所示。

图3 约束窗口示意图
2 动力段制导律设计
由上一小节中制导问题的描述可知,动力段制导的目的是使飞行器在飞行过程中动压、过载满足限制条件,同时在偏差条件下,使飞行轨迹能跟得上标称轨迹。动力段结束时,飞行器的高度、速度状态均在窗口内。
根据式(7)和式(8)可知,动力段的推力远远大于机体轴上的气动分力,因而可以通过调整俯仰角的值改变推力的方向实现对高度、速度的跟踪。
利用小扰动原理对非线性微分方程进行小扰动线性化处理,则式(5)可以写成:
(19)
(20)

(21)
(22)
(23)

(24)
其中ΔH=Hr-H,根据误差方程,当系统稳定时,偏差为0,将式(24)转化为
(25)
可进一步转化关于俯仰角指令的制导律:
(26)
其中:
(27)
(28)
由式(26)中各个参数的物理意义,结合物理概念,可以确定制导律中各个参数的大小。动力段飞行过程中,高度和俯仰角随着速度的增大单调变化,由实际高度与标称高度的高度偏差产生俯仰角增量,将俯仰角增量和标称俯仰角的和作为俯仰角指令值。因而制导律参数可以按照单一变量给出。图4为该制导律的结构图,该结构可近似为PD控制。
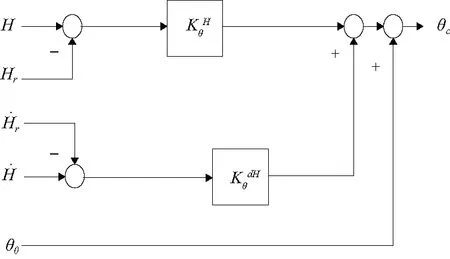
图4 动力段制导律结构图
考虑到动力段高度、速度变化范围跨度大,以表1的形式给出不同速度条件下的制导律参数值。

表1 高度制导回路参数
3 仿真验证
为了验证制导律的鲁棒性,对于亚轨道飞行器的动力段需要进行极限偏差仿真,考虑的不确定性偏差因素有:大气密度、轴向力系数、法向力系数、侧向力系数、滚转力矩系数、偏航力矩系数、俯仰力矩系数、发动机的比冲、流量、混合比同向偏差、最大风干扰。
3.1 仿真环境建立
仿真环境以通用PC计算机作为硬件平台,由等效飞行控制软件和集成仿真软件组成,其总体架构如图5所示。

图5 仿真环境总体架构
等效飞行控制软件为实际运行在飞行器上的飞行控制软件在Windows下的移植。主要功能是进行制导律与控制律的解算任务,为了保证任务解算的实时性,采用μC/OS实时内核进行任务调度。
仿真软件集成了飞行器数学模型和仿真控制台界面。飞行器数学模型的功能是模拟飞行器真实的特性。为了使模型解算严格和实际时间同步,采用高精度的多媒体定时器调用模型解算的接口函数。仿真控制台用于控制仿真程序的运行,而且可以设置仿真参数,同时以航迹图、历史曲线、数字等方式显示飞行器当前的飞行状态。
3.2 仿真结果
在3.1节描述的仿真环境中对样例亚轨道飞行器动力段飞行过程进行仿真试验,得到结果如下:图6是动力段的动压变化曲线,线1是动压限制曲线,蓝线是偏差仿真时动压的变化曲线;图7是动力段的法向过载变化曲线,蓝线是偏差仿真时法向过载的变化曲线;图8是动力段的高度、马赫数变化曲线,线1是动力段结束时窗口的约束条件(本刊为黑白印刷,如有疑问请咨询作者)。

图6 动压变化曲线

图7 法向过载变化曲线

图8 高度-马赫数变化曲线
从不确定性仿真结果图可知,动力段动压满足约束条件,法向过载远远小于约束条件,不会超限。动力段结束时,高度、速度状态均在走廊内,因而设计的高度跟踪制导律满足条件。
4 结语
本文提出了一种基于高度跟踪的制导律,通过质点运动学方程推导出高度和高度变化率之差与俯仰角之间的对应关系,又有动力段推力远远大于气动力,因而通过改变推力方向,即改变俯仰角大小可以改变速度、高度的值。同时,动力段飞行过程需要满足一定的动压、过载约束,在动力段结束时,高度、速度的状态处在走廊内。通过极限偏差仿真验证,高度跟踪制导律使得飞行器动力段的飞行状态完美满足约束条件。
