联动环支架间隙和数量对静子叶片调节精度的影响
2020-12-31钟明桥
郑 彦,钟明桥
(中国航发四川燃气涡轮研究院,成都 610500)
1 引言
喘振是由压气机的进、出口气流通道和下游节流装置等构成的整个压缩系统的一种以气流中断为特征的不稳定状态。当压缩系统进入喘振时,其通过的流量以及压气机出口压力等参数都随时间做低频振荡[1]。为避免发生喘振,有效措施之一是调节压气机前几级整流叶片的安装角,使流入的气流具有合适的迎角,避免气流分离。在先进发动机上常采用多级可调静子叶片(VSV)的方法使压气机的稳定工作范围更宽,进而达到更好的防喘作用[2]。
国内,多位专家对航空发动机多级可调静子叶片进行了理论和仿真研究。如贺飞等[6]采用齐次坐标分析法结合Matlab 软件推导运动方程的设计方法,改进了模型航空发动机调节机构。胡明等[7]使用CATIA三维设计软件和ADAMS虚拟样机仿真软件,设计了一种单级可调静子叶片并对其进行仿真,验证了设计的合理性,提高了设计效率。杨伟等[8]将ADAMS 参数化分析方法初步应用于高压压气机调节机构设计。赵雷等[9]基于UG NX三维设计软件和Excel 软件对可调叶片运动机构进行了参数化拓扑仿真分析。杨永刚等[10]使用ADAMS 虚拟样机仿真软件对几种摇臂和联动环的连接结构进行了对比分析。胡文杰等[11]利用ANSYS 创建摇臂柔性体模态中性文件,并将柔性体导入ADAMS 中进行刚柔耦合动力学模型仿真分析,分析了摇臂的弹性变形对调节机构动力学特性的影响以及摇臂在调节机构阻力中的影响。但国内的研究多集中在刚体模型领域,研究对象的各个零部件不会发生弹性变形,无法评估多级可调静子叶片运动过程中各个零部件的弹性变形对静子叶片调节精度的影响。
为研究多级可调静子叶片各个零部件的弹性变形对静子叶片调节精度的影响,本文将联动环先后设置为刚体和柔性体,使用ADAMS 虚拟样机仿真软件进行刚柔混合动力学模型仿真。利用UG NX创建三维CAD模型,再在ADAMS中创建运动副、驱动、载荷等模型要素,进行多体动力学仿真。
2 多级可调静子叶片虚拟样机的建立
多级可调静子叶片虚拟样机设计的主要要求是结构简单、操作灵活,在完成规定角度范围内转角误差小[12]。多级可调静子叶片进行动力学仿真,需要各个部件的质量信息,因此需定义各个部件的材料属性。将虚拟样机模型导入ADAMS/View 中后,一旦给构件赋予了材料属性,ADAMS软件系统会自动计算出构件的质量、质心位置及构件的转动惯量,并在质心处自动创建坐标系,进行运动学计算[7]。
2.1 VSV调节机构的组成
某型发动机的VSV 调节机构主要由可调静子叶片、摇臂、联动环、曲柄、连杆和作动筒等组成,采用外操纵方案。其外部零组件包括安装在延伸机匣上的两套液压驱动组件,和安装在高压压气机外机匣上的曲柄、连杆、摇臂、联动环等组件;内部零组件为高压压气机机匣内部的进口导流叶片和可调静子叶片。为简化计算,忽略延伸机匣、销子、销轴、衬套、螺栓等零件。每级调节机构如图1 所示。每级联动环上有6个联动环支架,沿联动环周向均布。

图1 VSV调节机构示意图Fig.1 VSV adjustment mechanism diagram
2.2 VSV调节机构的机械原理
VSV调节机构的结构简图如图2所示。调节原理是活塞杆在作动筒里做往复运动,带动驱动臂、传动杆和零级曲柄绕曲柄中心做定轴转动。零级曲柄带动零级联动环做绕发动机轴线转动和沿发动机轴线平动的复合运动。零级联动环带动零级摇臂,零级摇臂与进口可调导流叶片(IGV)固连,进口可调导流叶片绕自身轴心做定轴转动。同时,零级曲柄带动零一连动杆和零二连动杆,进而分别带动一级曲柄和二级曲柄。类似地,第一、第二级曲柄分别通过带动各自级的联动环、摇臂,使第一、第二级可调叶片做定轴转动。

图2 VSV调节机构结构简图Fig.2 VSV adjustment system mechanism diagram
以IGV 级为例,各级零部件之间的运动副设置如表1 所示。为模拟衬套弹性变形,各级可调静子叶片与各级内环的旋转副用衬套力代替。

表1 模型约束类型Table 1 Model constraint types
2.3 模型载荷和驱动
VSV调节机构的动力学仿真不仅需要给模型添加各种约束,还要添加载荷和驱动。模型将叶片受到的气动载荷分解为叶片绕自身的扭矩、沿发动机轴线的轴向力和沿转子叶片旋转方向的切向力。模型初始状态下,各级可调静子叶片处于中间位置,需要先将叶片复位。模型驱动方式为活塞杆强制位移驱动,总行程用时20 s。前5 s 模拟机构复位过程,活塞杆在空载下从中间位置移动到全关位置;后15 s 模拟发动机起动并逐渐加速到设计状态,活塞杆从全关位置移动至全开位置,气动载荷从0 逐渐增加到最大值。驱动函数曲线如图3所示。IGV叶片的气动扭矩曲线如图4所示,前5 s气动扭矩为0,后15 s逐渐从0增加到最大值。转子叶片受到的轴向力和切向力随时间的变化规律也一样,前5 s时力为0,后15 s从0逐渐增大到最大值。转子叶片VSV调节机构虚拟样机模型最终效果如图5所示。
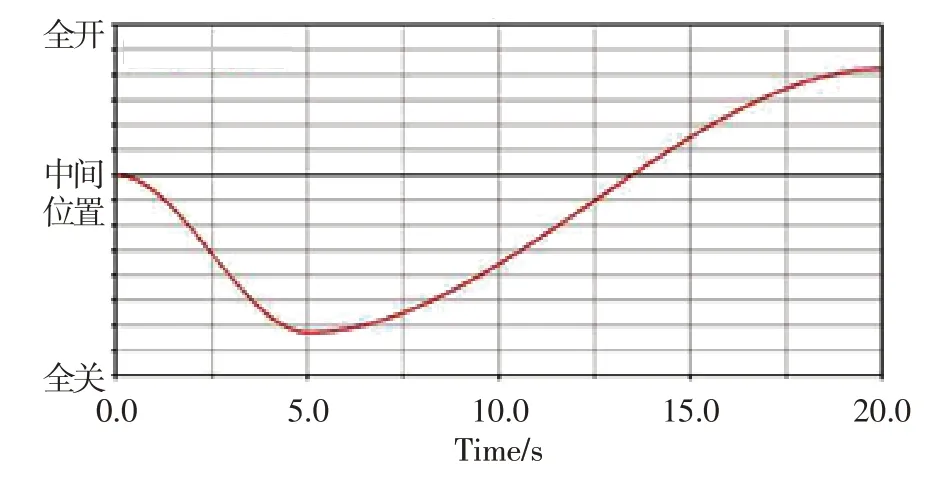
图3 活塞杆行程曲线Fig.3 Stroke curve of piston rod

图4 IGV气动扭矩行程曲线Fig.4 Aerodynamic torque stroke curve of IGV vane

图5 VSV虚拟样机模型Fig.5 VSV virtual prototype model
2.4 联动环柔性体转化
完成VSV调节机构刚体模型建模以后,将各级联动环转化为柔性体。ADAMS 中采用模态综合法将刚体转化为柔性体。模态综合法是将一个复杂结构分解成若干个较为简单的子结构,在清楚掌握各子结构振动特性的基础上,根据对接面上的协调条件将这些子结构合成一总体结构,然后利用各子结构的振动形态得出总体结构的振动形态。图6示出了转化为柔性体后的联动环。

图6 转化为柔性体的各级联动环Fig.6 Linkage rings converted to flexible bodies
3 仿真分析
3.1 刚体模型仿真分析
在开展VSV调节机构刚柔混合仿真之前,先进行了多刚体动力学仿真。图7示出了进口导流叶片和可调静子叶片调节角度随时间的变化规律。可看出,同级不同角向位置角度曲线基本重合,不存在角度一致性问题。

图7 叶片调节角度随时间的变化规律Fig.7 The variation of the angles of the adjustable vane at each stage with time
以IGV 级叶片角度为基准,取每级叶片调节角度的平均值。将IGV级叶片调节角度平均值作为基准,查看S1叶片和S2叶片调节角度的平均值,并与设计值进行对比。为研究VSV 调节机构刚体模型的精度,计算了S1叶片和S2叶片的绝对误差和相对误差,结果见表2。表中的相对误差等于绝对误差除以该级静子叶片的可调角度范围。分析表2 可知,S1叶片和S2叶片调节角度的绝对误差的绝对值均在0.1°以内,误差较小。

表2 刚体模型中S1和S2叶片调节角度误差Table 2 Errors of S1 and S2 in rigid body models
3.2 刚柔混合模型仿真分析
VSV调节机构中,联动环的半径最大,非常容易发生变形,从而对VSV调节机构的调节精度造成很大影响。为此,把各级联动环转化为柔性体,探究联动环柔性对各级可调静子叶片调节精度的影响。刚体模型中,每级联动环支架数目均为6个,每级联动环支架与机匣间的间隙均为0.20 mm。为研究联动环支架与机匣之间径向间隙以及支架数量对调节精度的影响,改变联动环支架与机匣间的径向间隙和周向分布数量,对比分析不同情况下的调节精度和调节角度一致性,最终得出一组合理的联动环支架结构方案。本节用各级可调静子叶片全开位置角度的最大绝对误差反映调节角度精度,用各级可调静子叶片调节角度标准差反映调节角度的一致性。
3.2.1 联动环支架与机匣间径向间隙对调节精度的影响
保持联动环支架数量不变,改变联动环支架与机匣间的径向间隙,分别得出不同径向间隙下的仿真结果,见表3。由表可知,随着间隙增大,各级可调静子叶片调节角度标准差的最大值也不断增大。显然随着间隙增大,各级可调静子调节角度一致性变差。
图8采用折线图方式直观地表示了不同径向间隙下的仿真结果。可看出,各级可调静子叶片中,IGV的全开位置角度最大绝对误差和调节角度标准差的最大值最小,S2的最大。分析VSV调节机构原理和误差来源,其原因是:本文使用的调节机构属于多级联调机构,液压作动筒通过摇臂和驱动臂直接带动零级曲柄和零级联动环运动,零级曲柄离原动件活塞作动筒距离最近,中间传动部件少,累积误差最小;零级曲柄通过零二连动杆带动二级曲柄和二级联动环转动,而零二连动杆长度比零一连动杆约长一倍,同等截面和材料条件下结构稳定性较差,再加上各个运动副间隙误差带来的影响,使得S2的调节精度和调节角度一致性最差。根据表3和图8可得出,当联动环支架与机匣间的径向间隙小于0.05 mm时,各级可调静子叶片的调节精度和调节角度一致性变化较小,如S2 全开位置最大绝对误差均小于1.4°,调节角度标准差的最大值均在0.5°以下,调节精度改善有限。径向间隙在0.10~0.40 mm 时,各级可调静子叶片的调节精度和调节角度一致性都随径向间隙的增加而变差。仍以S2为例,全开位置最大绝对误差从1.227 074°增加到2.182 901°,增大了1.78倍;标准差最大值从0.391 369°增加到0.718 952°,增大了1.84 倍。当径向间隙超过0.40 mm 后,除S2的调节精度和调节角度一致性随径向间隙的增大不断变差外,其余两级可调静子叶片的变化不大,趋于稳定。据此,各级可调静叶的调节精度和调节角度一致性跟联动环支架与机匣间的径向间隙呈负相关关系。综合考虑调节精度要求和机匣工作时的受热膨胀变形,各级联动环支架和机匣间的径向间隙应控制在0.05~0.10 mm之间。

表3 联动环支架在不同径向间隙下的仿真结果Table 3 Simulation results of different radial clearances of the linkage ring bracket

图8 调节精度和一致性与径向间隙的关系Fig.8 Adjustment accuracy and consistency in relation to radial clearance
3.2.2 联动环支架周向分布数量对调节精度的影响
保持联动环支架与机匣间的间隙为0.20 mm,改变联动环支架周向分布数量,分别得出不同周向分布数量下的仿真结果,见表4。
不同联动环支架周向分布数量下调节精度和一致性的仿真结果见图9。由图可知,在三级可调静子叶片中,IGV的调节精度和调节角度一致性最好,S2 的最差。当支架少于4 个时,各级可调静子叶片的调节精度和调节角度一致性趋于稳定,无大幅度变化。支架从4个增加到8个过程中,各级可调静子叶片的调节精度和调节角度一致性随联动环支架数量的增加而变好。以S2为例,全开位置绝对误差最大值从3.761 989°减小到0.872 764°,降低了76.8%;标准差的最大值从1.299 180°减小到0.299 600°,降低了76.9%。当支架超过8个后,各级可调静子叶片的调节精度和调节角度一致性变化幅度不大,趋于稳定。据此,各级可调静子叶片的调节精度和调节角度一致性与联动环支架数量呈正相关关系。综合考虑结构复杂程度和成本因素,建议联动环支架周向分布数量为8个。

表4 不同联动环支架数量下的仿真结果Table 4 Simulation results with different number of linkage ring brackets

图9 调节精度和一致性与联动环支架周向分布数量的关系Fig.9 Adjustment accuracy and consistency in relation to the number of linkage ring brackets
4 结论
以高压压气机调节机构为研究对象,计算了刚体模型的调节精度,验证了设计的合理性。通过改变联动环支架与机匣间的径向间隙及支架周向分布数量,探究了二者对调节精度和调节角度一致性的影响。主要得出以下结论:
(1) 在VSV 系统刚体模型中,各级可调静子叶片的调节精度和调节角度一致性非常高,符合设计要求。
(2) 在VSV 刚柔混合模型中,各级可调静子叶片的调节精度和调节角度一致性均比VSV 系统刚体模型的差。
(3) 联动环支架与机匣间的径向间隙对各级可调静子叶片的调节精度和调节角度一致性有很大影响。径向间隙越小,各级可调静子叶片的调节精度和调节角度一致性越好。综合考虑机匣的受热膨胀,建议联动环支架与机匣间的径向间隙在0.05~0.10 mm范围。
(4) 联动环支架周向分布数量对各级可调静子叶片的调节精度和调节角度一致性有很大影响。支架数量越多,各级可调静子叶片的调节精度和调节一致性越好;但当支架数量超过8个后,调节精度和调节角度一致性改善并不明显。建议联动环支架周向分布数量为8个。
