基于灰度共生矩阵的遥感图像抗旋转性研究
2020-12-28江玉杰王世航
江玉杰 王世航
摘要:灰度共生矩阵(GrayLevel Co-occurrence Matrix,GLCM)在图像纹理提取上应用极其广泛,但依旧存在不足。文章在GLCM纹理提取算法的基础上,引入局部二值模式(Local Binary Patterns,LBP),以此來改变GLCM在不同方向上的不一致性,解决因选取GLCM方向的不同给研究带来的误差。经实验,该文章提出的GLCM-LBP纹理特征改进方法,有效解决了方向不同带来的问题,同时计算量大幅减少。
关键词:灰度共生矩阵; 局部二值模式;遥感;图像处理;纹理提取
中图分类号: TP237文献标识码:A
文章编号:1009-3044(2019)31-0013-04
Abstract:Gray-level co-occurrence matrix (GLCM) is widely used in image texture extraction, but it still has deficiencies. Based on the GLCM texture extraction algorithm, Local Binary Patterns (LBP) to change the inconsistency of GLCM in different directions and solve the errors caused by the different GLCM directions were introducedin this paper. Through experiments, the GLCM-LBP texture feature improvement method proposed in this paper effectively solves the problems caused by different directions, and the calculation amount is greatly reduced.
Key words:gray-level co-occurrence matrix;local binary patterns; remote sensing; image processing; texture extraction
GLCM作为广泛使用的纹理特征提取方法,在遥感图像信息提取中也发挥着重要作用。1973年,Haralick[1]等人定义了包括角二阶矩、对比度和熵等在内的14个GLCM特征因子。GLCM在纹理分析中表现非常优秀,广泛运用在图像纹理特征提取上,与GLCM同时期的方法还包括灰度差分统计法[2]、灰度行程长度法[3]等,这些方法在提取纹理时具有一定的效果,但是存在缺陷。经灰度差分统计法计算的对比度与GLCM相同,灰度行程长度法未被可以有效提取纹理特征,因此后续的研究和应用比较少。针对GLCM在不同方向上有不同矩阵的情况,2007年,冯建辉[4]等在研究时分别计算四个不同方向的GLCM并取平均值,证明GLCM提取图像纹理特征能在一定程度上提高分类精度;2014年,刘天时[5]等在不同方向上引入权值因子将其与特征参数融合,所提取的结果具有更好的图像识别能力;2016年,张鑫[6]等引入“伪像素点”的概念,提高纹理特征的旋转不变性,经公共图像库的验证,具有更好的抗旋转性。本文在GLCM的基础上引入LBP,以期新的方法解决在不同方向上GLCM不一致的问题。
1 灰度共生矩阵(GLCM)
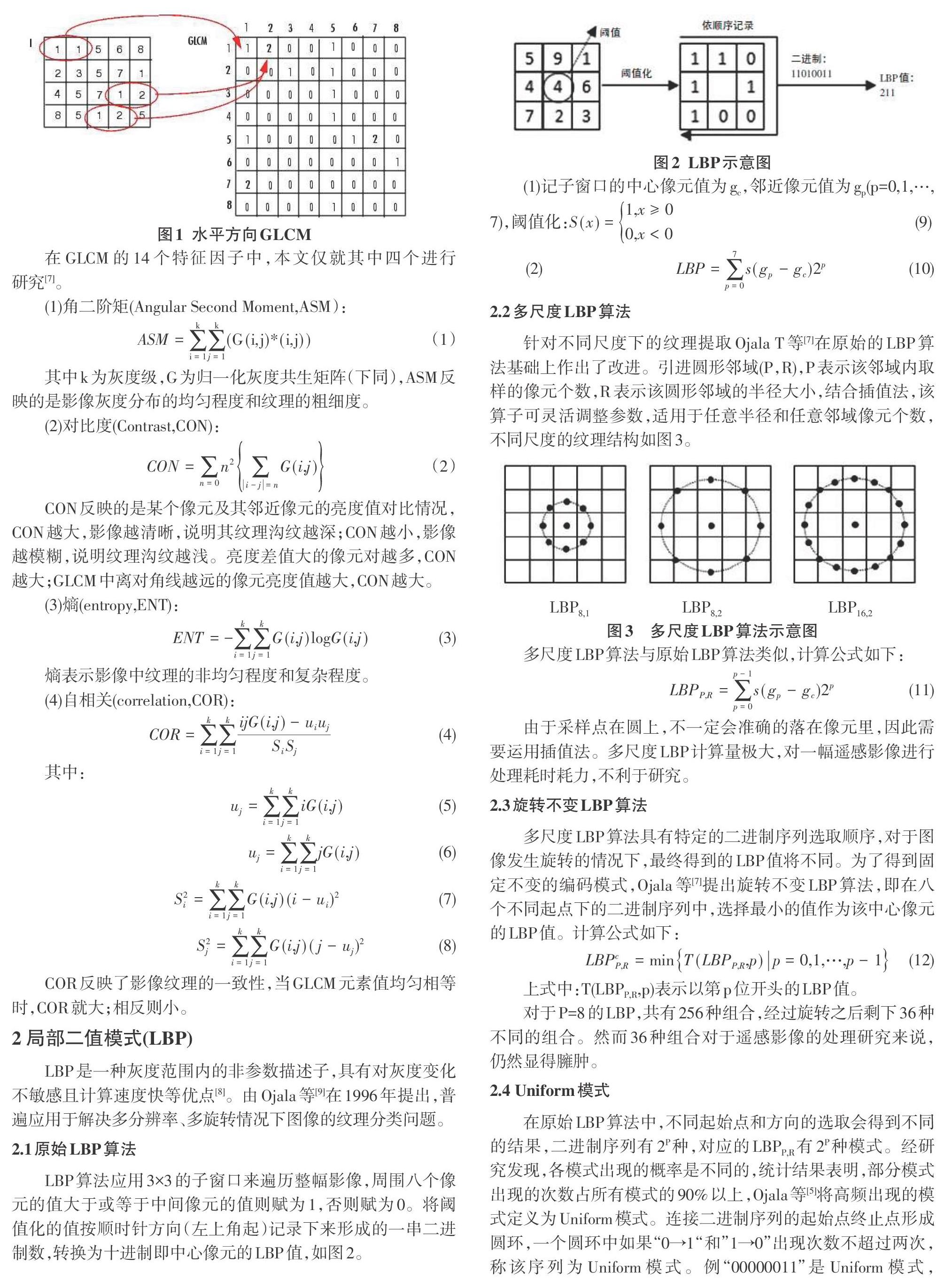
GLCM是一种研究图像灰度的空间相关性来描述纹理的方法,灰度分布在空间位置上反复出现形成纹理,在图像中一定距离下的两像元的灰度存在某种关系,即图像中灰度的空间相关特性。以遥感影像为例,取影像(N×N)中的任意一点(x,y)及另一点(x+a,y+b),该点对的灰度值记为(g1,g2),移动点(x,y)遍历整幅影像,设灰度级为k,则有k2个点对灰度值(g1,g2),统计每种灰度值的出现次数并排列成方阵即为GLCM。
(a,b)的取值参考纹理特征,对于较细的纹理,取(1,1)、(1,0)等,当取(1,0)时,像元对是水平的,称为0°扫描,如图1;当取(1,1)时,像元对是右对角线的,称为45°扫描;当取(0,1)时,像元对是垂直的,称为90°扫描;当取(-1,1)时,像元对是左对角线的,称为135°扫描。
COR反映了影像纹理的一致性,当GLCM元素值均匀相等时,COR就大;相反则小。
2 局部二值模式(LBP)
LBP是一种灰度范围内的非参数描述子,具有对灰度变化不敏感且计算速度快等优点[8]。由Ojala等[9]在1996年提出,普遍应用于解决多分辨率、多旋转情况下图像的纹理分类问题。
2.1原始LBP算法
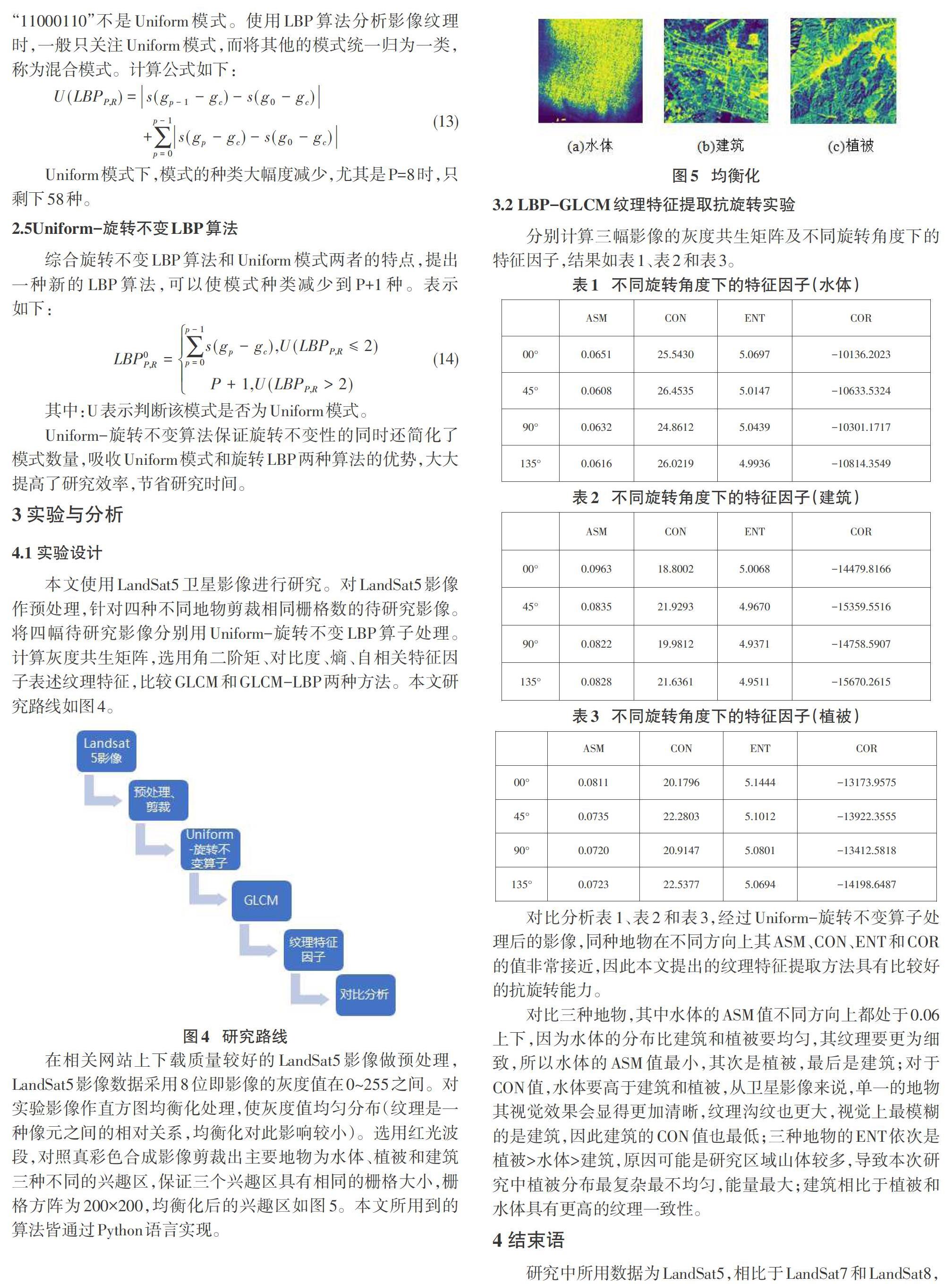
LBP算法应用3×3的子窗口来遍历整幅影像,周围八个像元的值大于或等于中间像元的值则赋为1,否则赋为0。将阈值化的值按顺时针方向(左上角起)记录下来形成的一串二进制数,转换为十进制即中心像元的LBP值,如图2。
2.2多尺度LBP算法
针对不同尺度下的纹理提取Ojala T等[7]在原始的LBP算法基础上作出了改进。引进圆形邻域(P,R),P表示该邻域内取样的像元个数,R表示该圆形邻域的半径大小,结合插值法,该算子可灵活调整参数,适用于任意半径和任意邻域像元个数,不同尺度的纹理结构如图3。
由于采样点在圆上,不一定会准确的落在像元里,因此需要运用插值法。多尺度LBP计算量极大,对一幅遥感影像进行处理耗时耗力,不利于研究。
2.3旋转不变LBP算法
多尺度LBP算法具有特定的二进制序列选取顺序,对于图像发生旋转的情况下,最终得到的LBP值将不同。为了得到固定不变的编码模式,Ojala等[7]提出旋转不变LBP算法,即在八个不同起点下的二进制序列中,选择最小的值作为该中心像元的LBP值。计算公式如下:
