基于ADAMS的行星齿轮传动动力学研究
2020-12-28冯静娟汤淋淋
冯静娟,汤淋淋
(硅湖职业技术学院,江苏 昆山 215300)
0 引言
行星齿轮传动机构作为常见的传动装置已经被广泛应用于制造业,其结构较为紧凑、运动较平稳且传递功率大[1-2]。但是由于其结构较为复杂,在长时间高速运转工况下,容易发生系统故障,因此需要针对行星齿轮传动中的齿轮副以及输出特性进行研究,分析其在运转过程中的角速度、啮合力以及频率,为后续行星齿轮的动强度校核提供数据参考[3]。本文基于ADAMS对行星齿轮传动进行动力学研究。
1 基本参数

2 前处理
在进行动力学仿真之前需要对模型进行处理,去除一些传动过程中不影响整体传动效果的零件以及其他连接设备,其简化模型如图1(a)所示。在动力学仿真中,最重要的就是设置正确的运动关系,因此这里主要进行运动副的设置。行星齿轮传动中一共有6个转动副和6个齿轮副,如图1(b)所示。转动副具体为:R1:行星架与地面之间的固定旋转副;R2:行星架与太阳轮之间的旋转副;R3:内齿轮与行星架之间的旋转副;R4、R5、R6:行星架与行星轮之间的旋转副[4]。齿轮副具体为:太阳轮和3个行星轮啮合的齿轮副G2、G4、G6;行星轮和内齿轮啮合的齿轮副G1、G3、G5。把输入轴的角速度设为3 840 °/s,输出轴施加360 Nm(行星齿轮给定值)的扭矩,载荷步时间设为0.8 s,共计算500步[5]。
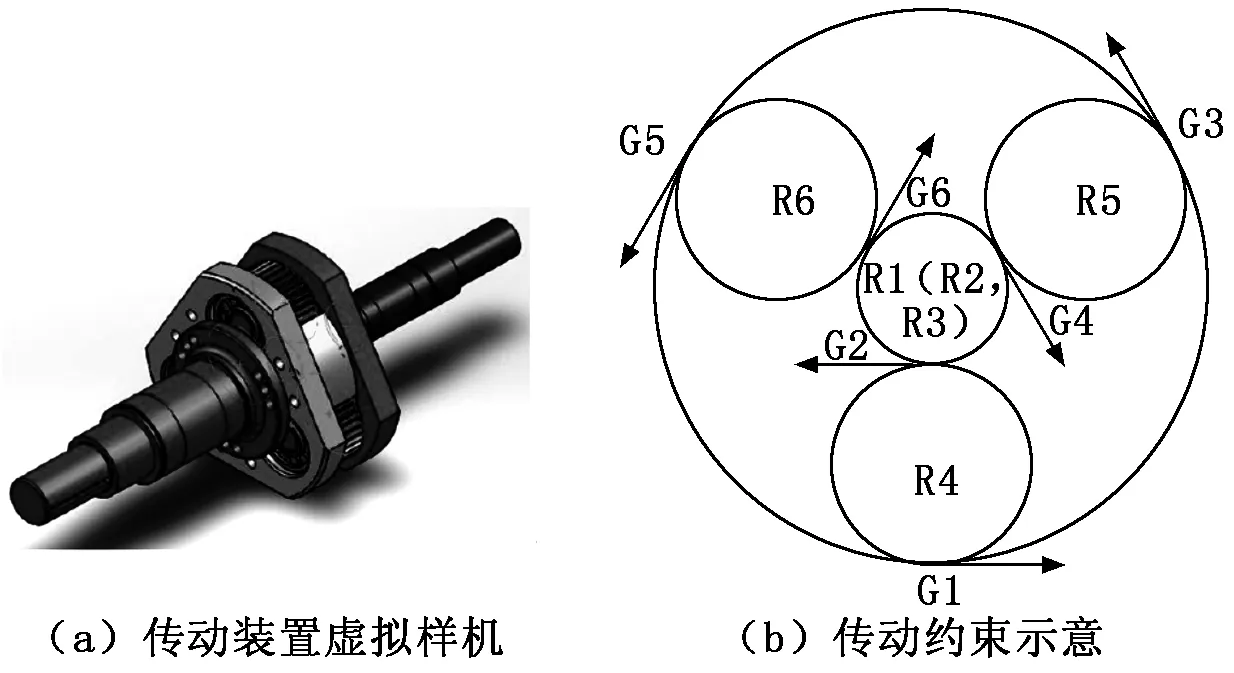
图1 行星齿轮减速器虚拟样机及传动约束
3 仿真结果
3.1 传动装置角速度分析
仿真得到的输出轴和行星轮的角速度分别如图2和图3所示。

图2 输出轴角速度
从图2和图3中可以看出:输入角速度为定值3 840 °/s,输出角速度为711.143 °/s,行星齿轮的角速度恒定为1 129.468 °/s。通过相关的理论来分析对应转速,因为输入轴以及太阳轮之间一直被浮动套连接着,与此同时输出轴以及内齿轮之间也由螺栓相连,所以它们彼此之间的转速都是相同的。而且正是由于输入轴的转速是不变的,所以其余相关部件的转速也是固定不变的,都做匀速圆周运动。
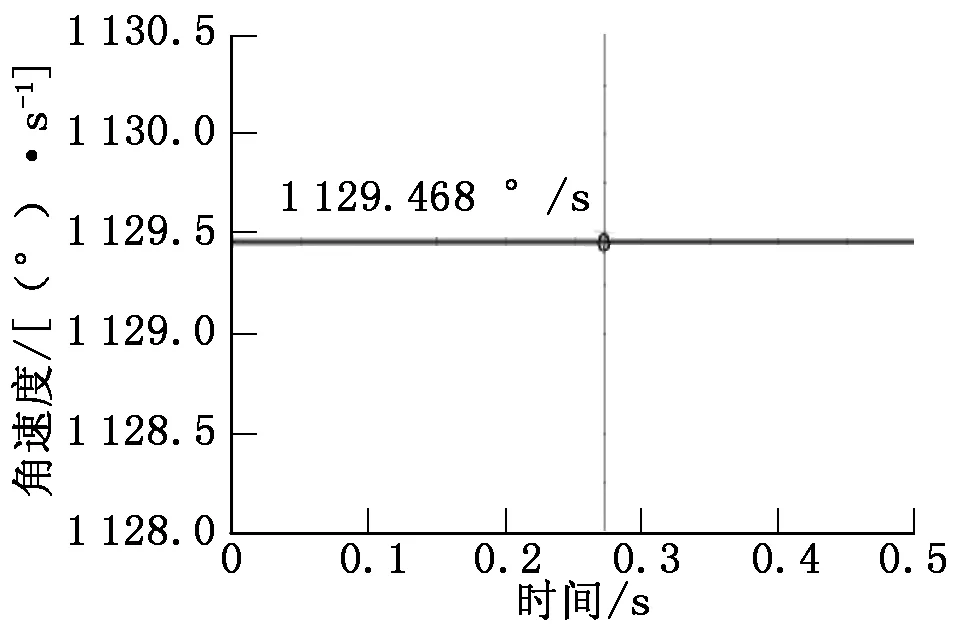
图3 行星轮角速度
仿真和理论计算得到的输出轴和行星轮角速度对比如表1所示。由表1看出二者的误差分别是0.041%和0.02%。计算得到的输入轴和输出轴的角速度之比为3 840/711=5.41,仿真得到角速度之比为3 840/711.143=5.4,误差约为0.2%(不到1%,可忽略不计)。所以通过分析这些数据能够得到结论:虚拟样机具有可靠性。

表1 仿真和理论计算得到的角速度对比
3.2 啮合力与频域分析
图4和图5分别为行星轮与太阳轮在周向和径向的啮合力随时间的变化曲线。
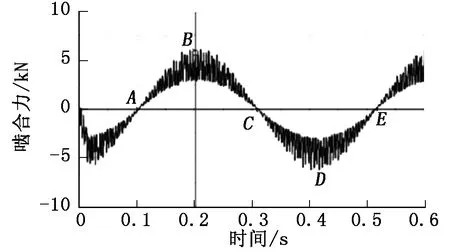
图4 行星轮与太阳轮间周向(X方向)啮合力曲线
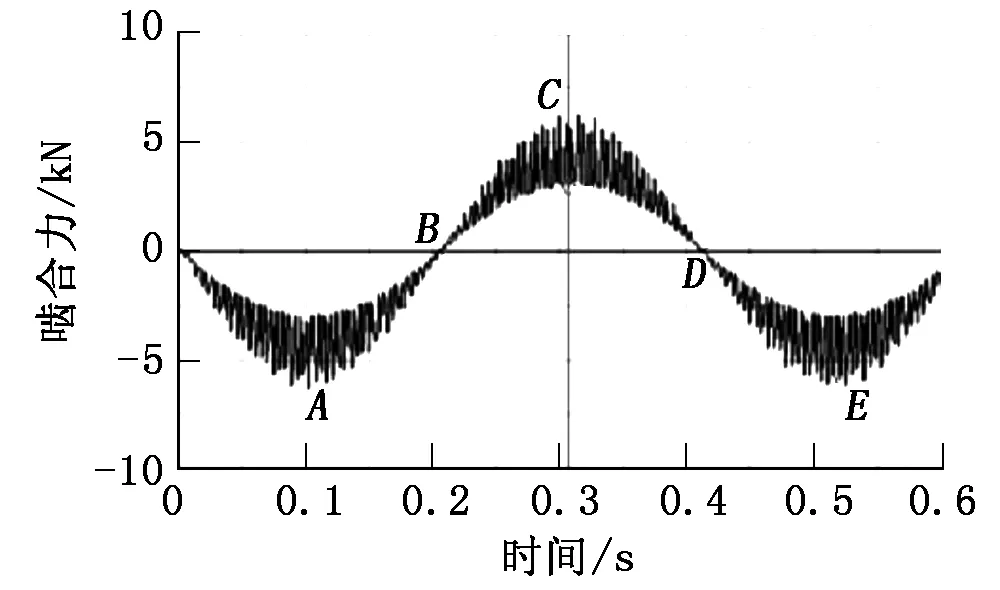
图5 行星轮与太阳轮间径向(Y方向)啮合力曲线
由图4和图5可以看出:从A到E为一个周期,太阳轮与行星轮在A处开始进行啮合;从A-B的整个过程中,X方向啮合力由A点开始逐渐增大至B点达到了它的最大值,而Y方向的啮合力则恰恰相反,从A点开始不断减小至B点低至它的最小值,而在此过程中,X和Y方向啮合力的方向均未产生改变;在B-C的整个过程中,X方向啮合力由B点开始减小直至C点低至它的最小值,而Y方向则恰恰相反,从B点开始不断增大至C点达到它的最大值。行星齿轮减速器行星齿轮与太阳轮齿轮副间啮合力呈正弦或者余弦函数变化,所以通过分析这些数据能够得到结论:虚拟样机具有可靠性。
图6和图7分别为仿真得到的行星齿轮与太阳轮啮合副G2周向力和径向力的频域图。
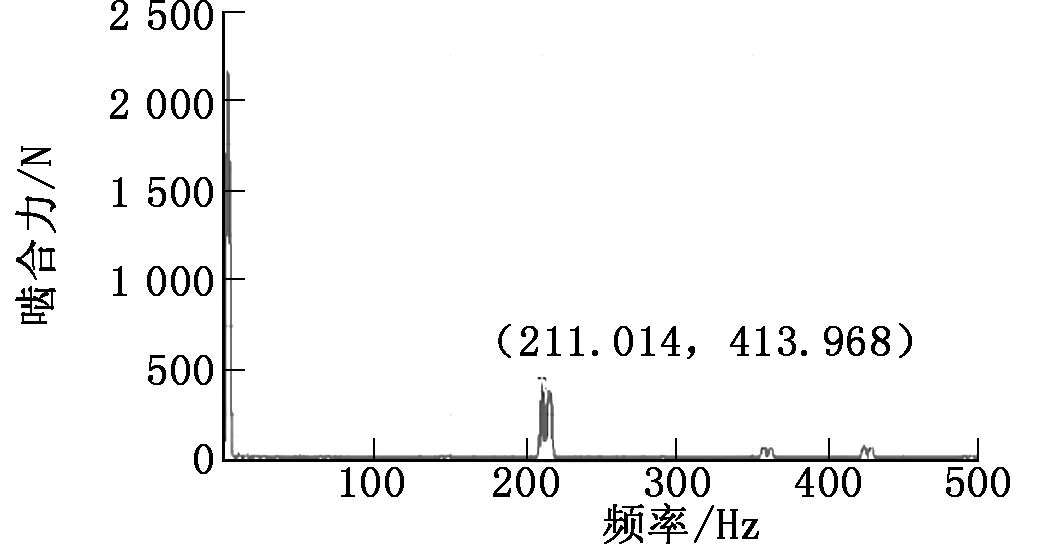
图6 行星轮与太阳轮啮合副G2周向力(X方向)频率
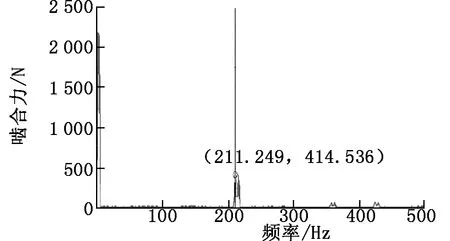
图7 行星轮与太阳轮啮合副G2径向力(Y方向)频率
由图6和图7可知:当圆周力为413.968 N时,频谱发生突变,此时频率为211.014 Hz;当径向力为414.536 N时,频谱发生突变,此时频率为211.249 Hz。对比二者的频谱线,可以看出二者的频谱线具有相同的变化趋势,且发生突变的位置趋于一致,因此可以得出太阳轮与行星齿轮的齿轮副圆周力和径向力的频谱具有一致性,虚拟样机具有可靠性。
4 结论
(1)对比仿真值和计算值,输出轴的角速度和行星齿轮的角速度的误差分别是0.041%和0.02%,传动比误差小于1%。
(2)行星齿轮减速器行星齿轮与太阳轮齿轮副间啮合力呈正弦或者余弦函数变化。
(3)圆周力和径向力在X、Y方向上的频谱具有一致性,虚拟样机具有可靠性。
