基于远程网络的分布式通信电源控制系统设计
2020-12-27林莉芸
林莉芸
(信阳职业技术学院 数学与计算机科学学院,河南 信阳 464000)
0 引 言
分布式通信电源作为通信网络中的关键设施,是保证通信网络能够安全高效运行的重要依据[1]。分布式通信电源一旦出现故障,就会引发整个通信网络瘫痪[2]。因此,控制分布式通信电源是确保分布式通信电源能够正常运行的主要手段[3]。在以往分布式通信电源控制系统的设计中,分布式通信电源的控制只能在特定范围中进行,存在控制效率低的问题。而远程网络能够将远程控制终端电路与系统服务器相连,通过传输以太网信号远程控制系统。
1 分布式通信电源控制系统硬件部分
1.1 以太网
本文基于远程网络设计以太网,为分布式通信电源控制的数据传输提供硬件环境,使分布式通信电源控制数据的超远距离传输成为可能。采用双绞线连接远程电源终端与交换机,通过级联的方式扩展网络规模,采用点到点的光纤链路方式连接所有硬件电缆,形成星型结构,设计RTW24899E以太网串口转换模块将数据信号转化为分布式通信电源控制开关信号,构造完整的系统硬件载体环境。
1.2 远程电源终端
以远程电源终端为分布式通信电源控制系统的核心硬件,内置核心控制板。远程电源终端主要包括核心控制板、CPU、传感器、网线以及显卡等。在选择核心控制板的型号时,应考虑功能需要、接口处资源、输入网口和输出网口的尺寸大小以及功率消耗等相关因素。针对上述要求,本文将型号为TRW2342100Q的核心控制板引入到远程电源终端设计中。
TRW2342100Q核心控制板可以使远程电源终端的各项性能达到最佳,并且在一定程度上节省系统汇总硬件的运行时间,提高系统运行效率。TRW2342100Q核心控制板可以控制多个电路的通断并调节分布式通信电源开关的速度,因此具有更高的控制效率[4]。远程电源终端主要用于为分布式通信电源控制提供驱动,其主要电路是由金属氧化物半导体场效应晶体管(MOSFET)和高速光耦共同构成,驱动形式为脉冲宽度调制驱动,从而使分布式通信电源控制系统获得自由的分布式通信电源开关调速。高速光耦作用是将TRW2342100Q核心控制板中发出的控制信号转换为控制当量,控制分布式通信电源。
1.3 显示器
显示器作为分布式通信电源控制系统运行结果的展示界面,可以显示远程电源终端采集到的分布式通信电源控制数据。本文选用显示器的型号为CFR2548,通过串口通信能够直接获得分布式通信电源控制数据,另外显示器的硬件环境配置包括2 Mb/s PC端各类型浏览器和移动端各类型浏览器。
2 分布式通信电源控制系统软件部分
2.1 采集分布式通信电源控制数据
远程网络中利用IEEE802.1B生成树协议,采集每一个端口中的分布式通信电源控制数据信息,自动化采集控制数据。考虑到远程网络具备不稳定的特性,会采集到一些无效的数据样本。因此,为了避免系统出现无效控制,本文通过远程网络中的RS232或USB接口采集控制数据,并将数据采集速率控制在1.0~110.5 kb/s。此外,采用远程网络中的虚拟专网技术对分布式通信电源控制命令进行数字签名。通过过滤数据中的无效控制数据,将有效数据保存在数据库中,实现控制数据的自动采集。
2.2 基于远程网络建立控制数据高级通信协议
通过将远程网络应用在控制数据传输过程中,实现控制数据传输的智能化调频。利用远程网络将实时采集的分布式通信电源控制数据发送至前端显示区域,既能够保证系统的稳定运行,又能够通过高级通信协议中的调频通信模块有效控制分布式通信电源。测试分布式通信电源运行中的电流和电压,根据具体变化情况,判断分布式通信电源实时数据采集信号是否出现波动。当采集数据信号幅度出现波动时,调整变频参数,在线控制分布式通信电源。波动较大时,必须在远程网络中引进虚拟局域网VLAN,根据系统的通信路径控制分布式通信电源数据采集信号。
2.3 计算分布式通信电源控制频率
根据传输得到的分布式通信电源控制数据计算分布式通信电源控制当量。计算时,首先给远程电源终端一个已知的数值,其次利用该数值,自动给出分布式通信电源一个原始恒定的运行速度,最后待分布式通信电源运行一段时间后,通过改变这一定值,计算相关当量控制分布式通信电源开关的频率。设分布式通信电源控制频率为W,可得以下公式:

式中,K是远程电源终端在实际运行过程中的比例系数;x是系统自动采样次数,为实数;f(x)是系统第x次自动采样时与实际定量之间的偏差;j是控制误差比例系数。利用式(1)可以计算出分布式通信电源控制频率,为控制分布式通信电源提供数据支持。
2.4 控制分布式通信电源
得到分布式通信电源控制频率后,利用计算机接口控制分布式通信电源。通过映射出两个4位8进制数,获得在每个控制点位上的控制数据,再利用特定的变量数据映射分布式通信电源控制数据,形成区域性的映射。通过C++面向对象的编程思想将分布式通信电源控制数据转换为具体的参数控制,用户只需事先将规定的分布式通信电源控制限制输入到系统中,系统即可自动检测是否改变控制参数。最后利用计算机的端口状态存储控制数据及控制信息,并将其输入到相应的映射区域中。通过分析区域映射中对应的控制语义和词义得出正确的控制结果,实现基于远程网络的分布式通信电源控制。
3 实例分析
3.1 实验准备
本次实验选择100个型号相同的分布式通信电源作为实验对象,电压输入范围为100~286 V AC,输出电压为110 V,输出功率为150 W,短时功率最高可达100 W。本次实验将控制波特率作为实验测试指标,控制波特率越高证明该控制系统的控制效率越高。本文控制分布式通信电源系统通过MODBUS软件采集一组控制波特率,设置为实验组,传统控制分布式通信电源系统通过MODBUS软件采集一组控制波特率,设置为对照组。此外,在此次实验中,将实验时间设置为10 h。
3.2 实验结论
根据上述设计的实验步骤采集实验数据,将两组系统得出的控制波特率整理为对比表格,如表1所示。
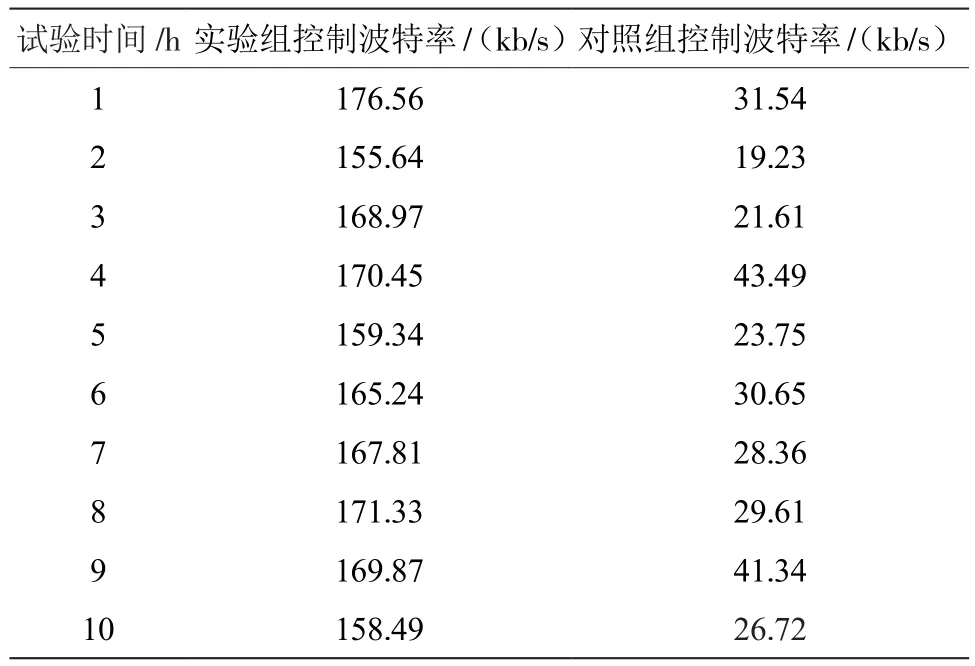
表1 控制波特率对比表
通过表2可知,在相同的测试时间中,本文设计的控制系统的控制波特率明显高于对照组,对分布式通信电源的控制效率更高,可以证明所设计的控制系统在实际应用中具备更高的控制效率,有理由投入现实使用。
4 结 论
通过实例分析证明,远程网络在分布式通信电源控制系统应用中具有明显优势。控制波特率的高低是保证分布式通信电源控制系统控制效率的主要衡量标准,而针对分布式通信电源控制系统进行基于远程网络的优化设计可以大幅度提高控制波特率。因此,在日后的研究中,坚持以远程网络为核心,提高分布式通信电源控制系统的综合性能,促进分布式通信电源控制系统的优化设计能够有更好的发展。
