直驱风力发电机变桨距控制系统
2020-12-09宋文宇
宋文宇
摘要:本文论述直驱风力发电机控制系统变桨距控制系统,桨距角位置控制由一个PI控制器调节,在不同的桨距角时可调节该控制器系数保证得到合适的气动转矩,由此推动直驱风力发电机转子到达发电机额定转速。在此系统中,风力发电机主轴转速也由变桨距控制系统控制,用一个 PID控制器进行调节。发电机主轴转速调节作为串级调节的主调,桨距角位置控制调节作为副调控制执行器(变桨电机)进行风力发电机桨叶调节。
关键词: 变桨距,控制器,转速控制
一、前言
风力机的直驱化是风力机发展的一个趋势。目前大多风电系统发电机与风轮通过变速齿轮相连,齿轮箱装置不仅降低了系统的效率,增加了系统的成本,而且容易出现故障。直驱式风力发电机可以直接与风轮相连,增加了系统的稳定性,在直驱风力发电系统中风机与发电机直接耦合,省去了传统风力发电系统中的国内难以自主生产且故障率较高的齿轮箱这一部件,因此,没有齿轮箱的直驱式风力发动机,具备低风速时高效率、低噪音、高寿命、减小机组体积、降低运行维护成本等诸多优点。
随着国内风力发电行业的快速发展,风力发电机组国产化已经成为趋势,打破国外设备的垄断的同时大幅降低了机组成本。而作为900KW风力发电机组变桨距控制系统,要充分利用风力调节浆叶的迎风角度,进而调节发电机转速恒定在额定转速,从而使发电机能够以额定功率发电。由于风速随时都在变化,浆叶的迎风角度也要时刻进行调整。并且在风速过大时,变桨距调节系统要作为气动刹车自动顺桨以避免风力发电机组可能的超速而带来的危险。
二、系统概述
本变桨距控制系统应用于900KW风力发电机组。变桨距系统控制主要包括發电机主轴转速闭环控制,桨叶桨距角位置闭环控制,手动维护转动程序控制,变桨距系统故障检测和保护控制,各保护系统切换等。对于变速变桨距风力发电机组,当风速在额定风速以下时,通过控制发电机的电磁转矩,实现对风力机的转速控制,使风力发电机组获得最大的风能利用系数;当风速高于额定风速时(此时发电机转矩为额定转矩,值恒定),通过变桨减少风轮吸收的功率,使输出功率恒定。当然,由于变桨驱动系统不能跟随上快速变化的风,因此允许发电机转速瞬时升高,将瞬变的风能以风轮动能的形式存储起来,风速降低时,再将动能释放出来,从而使输出功率恒定(此时,风能被捕获,但是没有被完全转换成电能)。
1.变桨控制系统配置
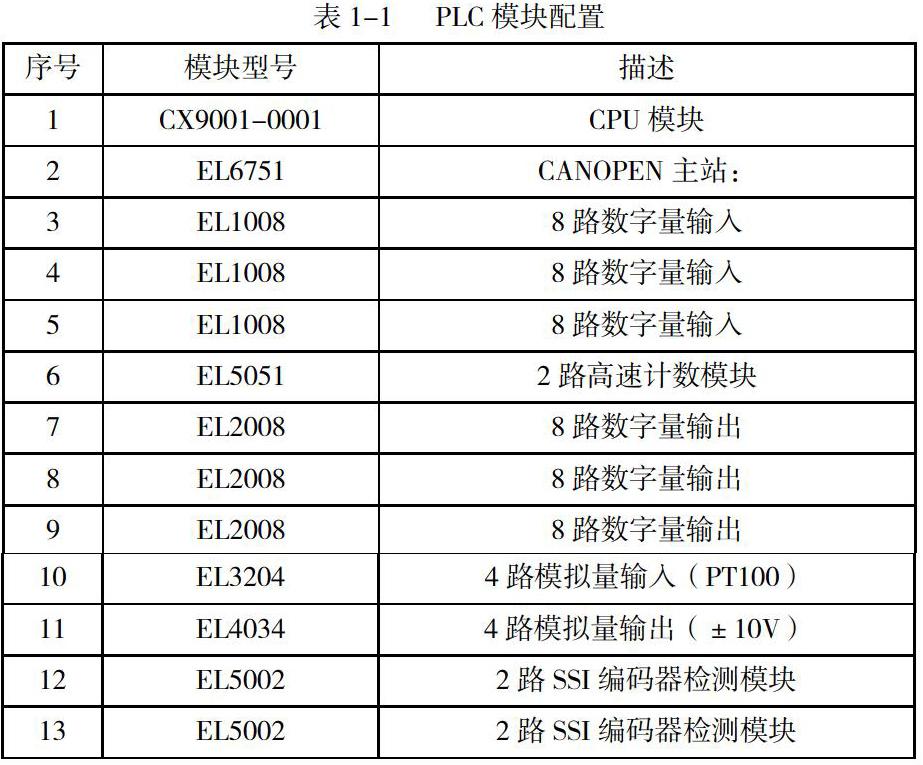
主控制器PLC采用倍福CX9000系列紧凑型以太网控制器,用于带E-bus的EtherCAT端子模块,导轨安装,不仅便于安装而且变桨距系统柜内空间较小的情况下节省了一定的空间。其他各个模块通过EtherCAT进行连接。主要模块如表1-1所示:
2.系统控制流程
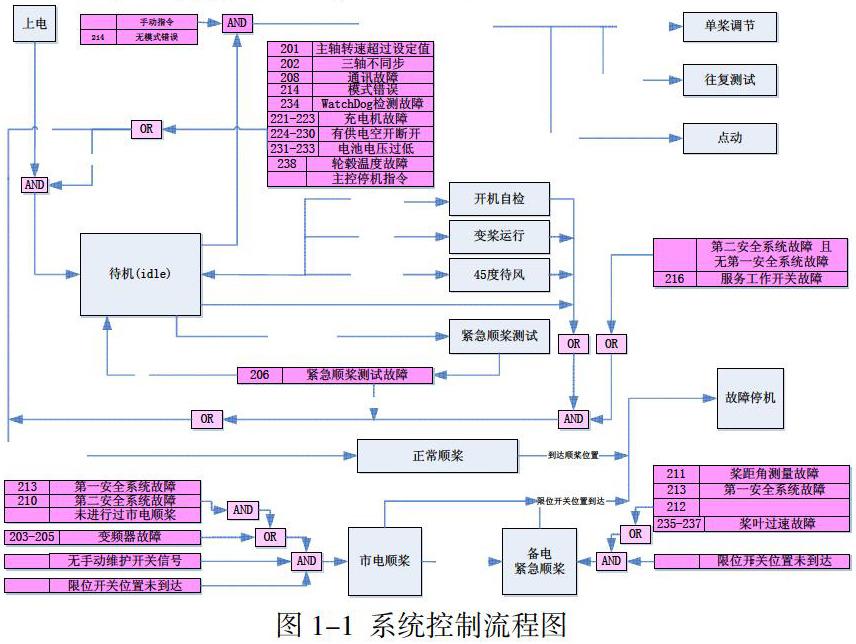
控制系统主要包括上电初始化,故障检测及处理,手动调节,自动调节运行等。上电后初始化,进行数据采集及通讯。当有故障时进行故障处理;满足手动命令时进入手动调桨功能;无故障且非手动时进入待机状态,当风力发电机组有运行指令时进入自动调节运行状态。
系统总体控制流程框图如图2-1所示:
三、变桨距系统闭环控制
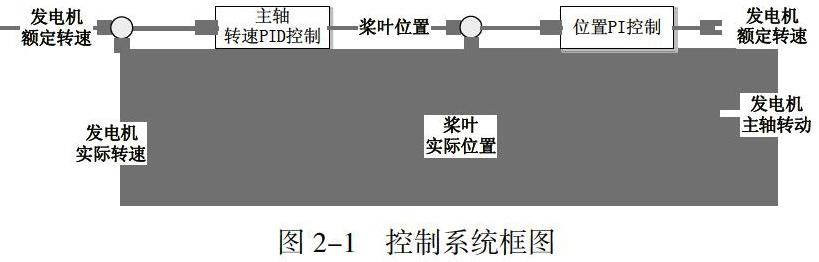
变桨距控制系统采用桨叶位置闭环PI控制和发电机转速闭环PID闭环控制双回路控制系统。其中发电机转速闭环作为主调。由设定的额定发电机转速和发电机实际转速做闭环,输出的桨距角给定和实际桨距角值做闭环,输出变桨电机变频器的频率给定。控制系统框图如图2-1所示:
当经过滤波的发电机实际转速未到达额定转速时,主轴转速PID控制器输出桨距角位置给定值给位置PI控制器,PI控制器根据此给定位置和当前实际桨距角位置值调节输出给桨叶电机变频器转动桨叶电机,使当前的桨距角位置增大或减小以减小或增大桨叶受风面,进而减小或增大发电机转速,使发电机转速到达额定。
四、控制系统保护功能
风力发电机组涉及到如电网掉电、发电机超速、风速过大等故障时,需要变桨距系统顺桨以实现主轴刹车从而起到保护功能。而变桨距系统自身也需要对出现的故障进行检测和保护,以下是一些变桨距系统自身检测并处理的主要故障保护功能:
1.电网掉电保护
当电网掉电时,变桨距控制系统由备用电源给驱动器直流母线供电,24VDC控制电也由备用电源提供,此时驱动器执行备电紧急顺桨,直至限位保护开关动作。
2.电网欠压/过压保护
当电网出现过压或欠压时,变桨距控制系统执行正常顺桨。控制系统具有低电压穿越能力,当电网故障或扰动引起风电场并网点的电压跌落时,在一定电压跌落的范围内,变桨距控制系统能够正常运行。
3.通讯故障保护
当变桨距系统PLC与主控CAN-OPEN通讯故障或与各驱动器之间通讯故障时,变桨距控制系统执行正常顺桨。
4.转子过转速故障
转子超过最大转速限定值(有超速保护开关动作)时,变桨系统断开看门狗输出,执行紧急顺桨操作。
5.第一安全系统故障
电机驱动器顺桨超过45S仍然没有到达顺桨位置。
6.第二安全系统故障
备用电池紧急顺桨超过30S仍然没有到达顺桨位置。
7.桨距角测试故障
叶片到达保护限位开关时,当前桨距角测量值与顺桨位置桨距角的设定值(85°~92°可设定)相差大于1.5°时;或者未到达限位开关位置,且当前角度测量值大于限位开关位置初始设定值时,系统断开看门狗信号紧急顺桨。
8.叶片不同步保护
对三个桨叶的角度进行监控,当三轴之间桨距角偏差超过3度并持续5秒(可设)时,变桨距控制系统执行正常顺桨。
9.变桨伺服驱动器故障保护
当发生变桨伺服驱动器内部故障时,变桨距控制系统执行市电顺桨。此时电机由市电直接供电转动至限位保护开关位置停止。
10.后备电源保护
当后备电源欠压,供电回路跳闸,充电机故障,充电回路不正常时,变桨距控制系统执行正常顺桨。
11.安全链保护
变桨距系统安全链将安全保护点与变桨距系统PLC看门狗输出串联,其中任一点出现故障断开时,变桨距系统执行紧急顺桨
12.限位开关、桨距角超限保护
当变桨距系统桨叶到达限位开关位置,驱动器封锁输出并抱闸。当桨距角超出变桨距系统设定的范围-10~100度时,变桨距系统投入备用电源紧急顺桨。
13.桨叶过速故障
当变桨速度超过系统最大转速时,变桨距系统由备用电源执行紧急顺桨。
14.各顺桨之间的切换保护
系统在正常顺桨或市电顺桨在一定时间后未到达安全位置,则进行备电紧急顺桨。当备电紧急顺桨在一定时间后未到达安全位置,则未到达安全位置的桨叶进行正常顺桨。
五、结论
本项目已经在风力发电场整机并网发电运行,变桨距系统各功能在经过实验室模拟调试、总装厂地面调试、现场轮毂安装调试、整机并网发电运行后,已经能够通过变桨距控制系统调节桨叶位置,继而调节发电机转速到达额定转速并网发电。而且变桨距控制系统的各个故障安全保护功能以及保护功能之间的切换也达到了项目预期的要求。
参考文献
[1] Tony Burton (美),武鑫 (著),风能技术,科学出版社, 2007年.
[2] Beckhoff Information System 04/2010,
