基于PLC的预测PI算法的封装
2020-12-09张浩任正云冯雪王成汪文斌
张浩,任正云,冯雪,王成,汪文斌
(1. 东华大学,上海 201620;2. 四川烟叶复考有限责任公司,四川 成都 610041)
预测控制[1]是一种基于闭环的控制算法,也是一种基于模型的先进控制算法,所以也叫作模型预测控制(MPC),起源于20世纪70年代,最初应用在工业控制领域。预测控制的核心思想与传统PID不同,传统PID是根据设定值与实际输出值之间的偏差来控制,而预测控制是依靠被控对象的历史数据和下一时刻的输入对未来输出进行预测,具有预测模型、滚动优化和在线校正的特点[2]。预测PI控制算法主要可以分为两大类: 带有预测功能的PID控制器和融合PID算法和预测算法的控制器。
1 预测PI算法的工作原理[3]
现假设一单位负反馈系统如图1所示。

图1 单位负反馈系统示意
由图1可知,GC(s)是控制器,GP(s)是被控对象的传递函数,则系统的闭环传递函数为
(1)
由式(1)可得控制器的传递函数为
(2)
假设被控对象的数学模型为
(3)
假设所期望的闭环传递函数为
(4)
式(4)中,λ是一个调整系统闭环的响应速度的可调参数。当λ=1时,系统开环和闭环的时间常数相同,响应速度相同;当λ>1时,系统开环的响应速度比闭环响应速度快;当λ<1时,系统开环的响应速度比闭环响应速度慢[4-5]。
把式(3)、式(4)代入式(2)中,可得控制器具体的传递函数为
(5)
进一步整理可得:
(6)

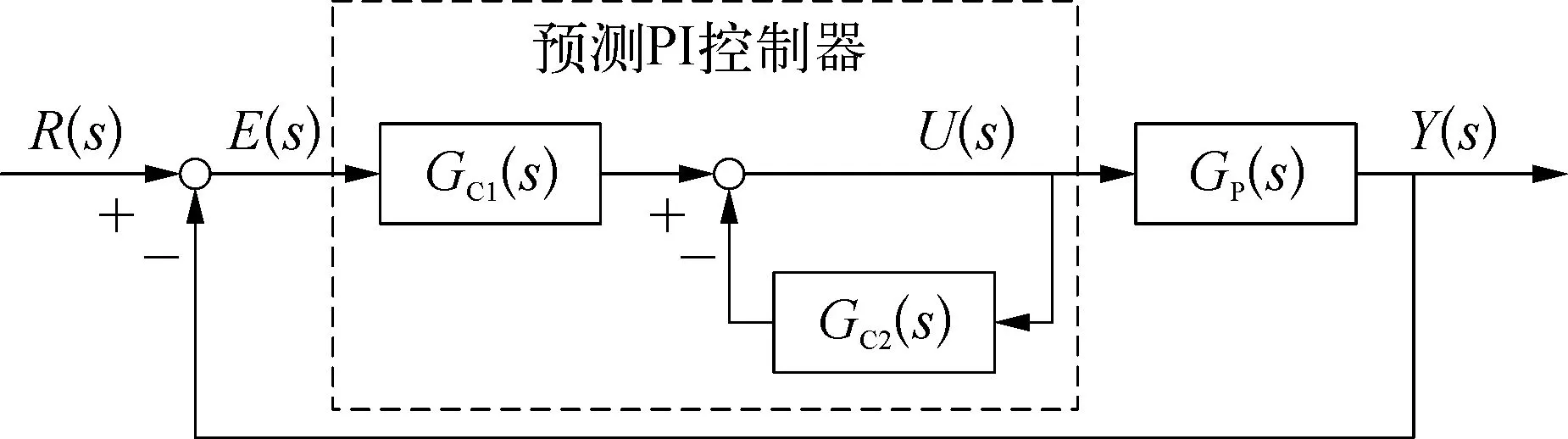
图2 预测PI控制算法原理示意
由图2可知:
(7)
(8)
预测PI控制器的结构如图3所示。

图3 预测PI控制器结构示意
2 预测PI算法的封装
本文所使用的软件是西门子博图软件v14版本,安装完成该软件后创建新项目。本文创建的新项目名为PPI(预测PI控制器),项目创建完成后,第一步点击“添加新设备”,添加所需的CPU型号,选择CPU 314C-2 PN/DP,其中PN代表PROFINET,表示以太网接口,DP代表PROFIBUS,表示DP接口;第二步点击“添加新块”,选择函数块(FB),编程语言是SCL,最后点击“确认”,即可创建一个新块。打开新块后,其编辑器窗口如图4所示。
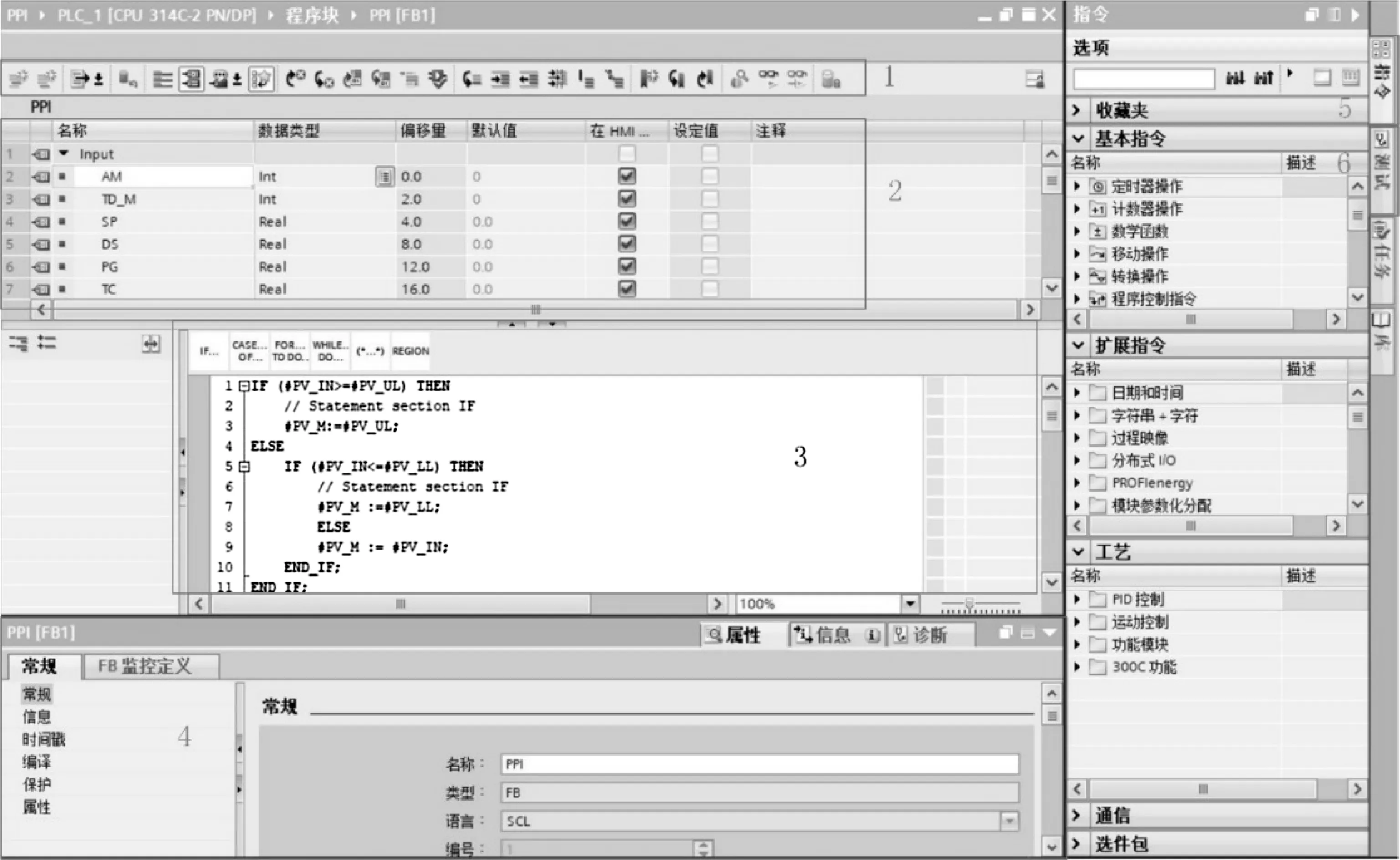
图4 程序编辑器窗口示意
图4中,标号为1的是工具栏,工具栏中包含程序编辑器一些常用的功能,如: 从块生成源、显示或隐藏绝对/符号操作数、转到上一个/下一个错误、更新不一致的块调用、启用/禁用监视、设置/删除书签等;标号2是块接口,块接口中显示的是块中使用的变量,属于局部变量,显示内容包括变量的名称、数据类型、偏移量、默认值等,背景数据块中显示的内容和块接口中的内容一致;标号3是编程窗口,是用来编辑程序的地方,其中包含一些编辑程序过程中常用的结构,如: 循环、跳转等;标号4是属性窗口,包含块的基本信息,可在属性、信息、诊断三个窗口间自由切换;标号5是指令任务卡,其中包含一些编辑程序过程中可随意调用的指令,有: 基本指令、扩展指令、工艺、通信等;标号6是测试任务卡,测试任务卡一般是在程序在线仿真时使用,该功能能够对程序纠错。
在编写控制算法之前,先要将控制算法进行离散化处理,由上文可知预测PI控制器的表达式为
(9)
可知离散化后的表达式为

(10)
所以,预测PI算法离散化的增量形式为

(11)
式中:TS——采样周期,一般TS=1 s。
将预测PI算法编写完成后,在需要时即可直接调用,即在编辑梯形图的程序中直接调用预测PI函数块。由于预测PI控制算法对于大滞后对象有良好的控制效果,所以当对象是大滞后对象时,就不需要使用传统的PID控制器进行控制,直接调用预测PI函数块即可。通过上述方法,以西门子PLC为平台,实现了预测PI算法的封装。
3 仿真测试

系统达到稳态后,在400 s时加入一个阶跃为5的干扰,三种控制算法加入干扰的仿真结果曲线如图5所示。当系统中加入干扰后,预测PI控制算法重新达到稳态所花费的时间最短,且恢复过程中没有振荡,表明预测PI算法具有良好的抗干扰性;Smith预估控制的超调量最小,重新达到稳态的时间略长于预测PI算法;PID控制器在恢复稳态的过程中存在一定的超调和振荡,并且花费的时间最长,控制效果最差。

图5 三种控制算法加入干扰后的仿真结果示意
系统达到稳态后,在350 s时,将设定值从20%改为15%,三种控制算法改变设定值的仿真结果曲线如图6所示。

图6 三种控制算法改变设定值后的仿真结果示意
由图6可知,设定值改变后预测PI算法的反应最为迅速,达到新的设定值所用的时间最少,且过程中没有超调和振荡,对设定值有良好的跟踪性能;Smith预估算法也能及时达到新的稳态值,只是达到稳态的时间略长;PID控制器的两种整定方法的控制效果仍然相差不多,在达到新的稳态之前会有一定的振荡,但Cohen-Coon法的震荡幅度略小于Z-N法,也间接证明了Cohen-Coon法是在Z-N法的基础上的改进。
再次将被控对象的时间常数由10改为12,三种控制算法的被控对象时间常数失配的仿真结果曲线如图7所示,将被控对象的滞后时间由15 s改为18 s,三种控制算法的被控对象滞后时间失配的仿真结果曲线如图8所示。
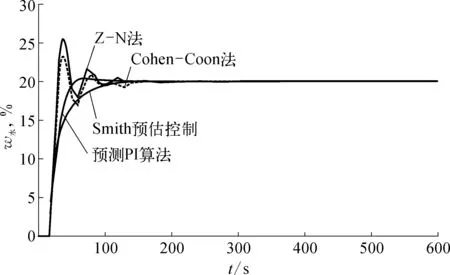
图7 三种控制算法的被控对象时间常数失配的仿真结果曲线示意
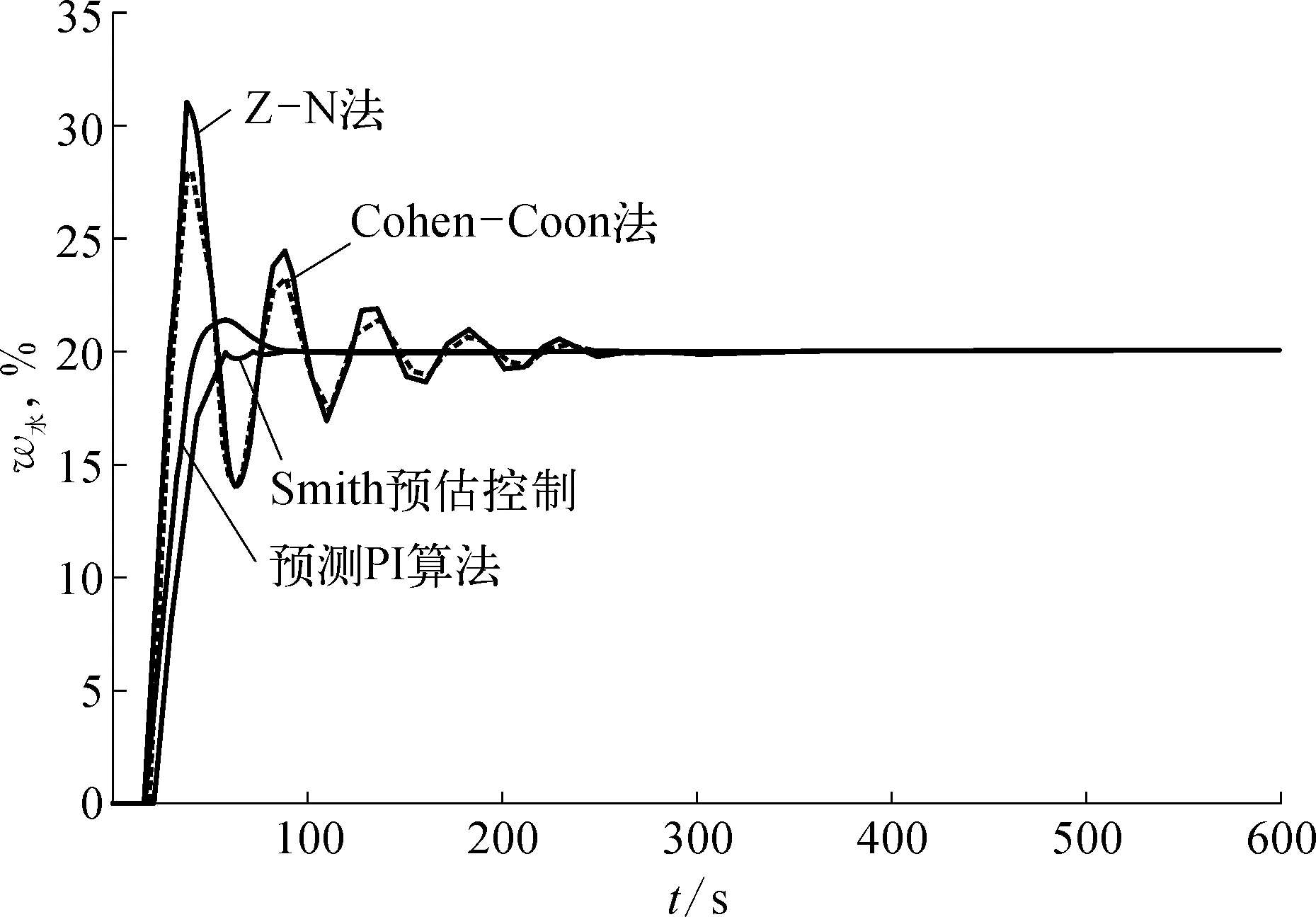
图8 三种控制算法的被控对象滞后时间失配的仿真结果曲线示意
由图7和图8可知,预测PI控制算法受模型失配的影响最小,虽然受模型失配的影响会有一定的超调,但是系统能够快速克服且未出现振荡,系统的快速性也未受到影响,仍然是上升速度最快,达到稳态用时最短,所以预测PI算法具有良好的鲁棒性;Smith预估控制是对被控对象模型精度要求最高的,当系统时间常数失配时,系统的上升速度变慢,达到稳态的时间被延长,系统滞后时间失配时,系统在达到稳态前有一些小的振荡;PID控制器受模型失配的影响也比较小,对超调量、达到稳态的时间等方面都有些许的影响,但是总的来说,鲁棒性还比较好。
4 结 论
综上所述,就大滞后系统而言,预测PI控制算法的性能是三种控制算法中最优异的,无超调,反应快速,上升时间短,具有良好的抗干扰性、跟踪性、鲁棒性等。
