基于STC89C52单片机的多地形智能轮椅的控制设计
2020-12-04陈毅博
陈毅博
(华北电力大学 控制与计算机工程学院,北京 102206)
0 引言
如今,基础公共设施越来越完善,人们的生活也越来越便利,但是很多历史遗留的设施造成人机不和谐的问题依然存在,在一定程度上限制了行动障碍人士独立出行,不利于社会主义和谐社会的发展。本设计在现有的可以爬平整楼梯的智能轮椅基础上,对生活中更为复杂的地面情况进行数字化分析及处理,结合特定结构的底盘履带模型来解决此类问题,以设计出可以应对更多复杂地形的多地形智能轮椅。
1 设计方案
鉴于在市面上现有履带式爬楼轮椅爬楼的稳定性分析及非均匀楼梯上爬楼平稳性样机试验数据[1],并且考虑到轮椅的平稳性、舒适性和多用性的发展需求,本设计采用分段履带与四轮相结合的方式,主要采用履带式结构来应对地形的变化,简化模型为履带小车,平地四轮结构采用现已有轮椅结构即可。为应对多变化地形,硬件方面,设计了一种3段履带式结构,尽可能加大对地形的适应能力和对智能软件的容错能力,攀爬时,调整轮椅背面前进方向,手动启动攀爬模式即可。软件方面,采用成本较低、操作较为简单的STC89C52单片机作为主控芯片,利用超声波传感器、红外传感器对地形的关键数据进行测量分析,维持自身稳定性与安全性。
2 硬件设计
2.1 底盘模型
本轮椅底盘分为前中后3段,前后两段相互对称。前后两个端点处设有方便攀爬的梯形探手构造,加强稳定性。测算估计出大体中段履带的长度,并结合内部螺钉等有关结构,最后测算出每段长为479.2 mm,具体结构参数如图1所示。为提高装置在阶梯上的稳定性,前后两端探手角度采用普遍的梯形端设计[2],前后两段长度较中段有所缩短,整个底盘模型长1 159.08 mm,具体数值如图2所示。在普通平地地形上时,后端履带向上紧靠轮椅后背,缩短体积,减少轮椅的空间占用。在准备攀爬时,用背面的后端探手搭上第一个阶梯,完成初始准备操作。
2.2 准备模块
准备模块分为测算、鉴定两项操作。测算是通过超声波传感器[3]和红外传感器来判断装置自身相对于地形障碍所处的位置,然后通过鉴定操作来决定是否需要通过移动轮椅来保证轮椅的安全和准备的成功。
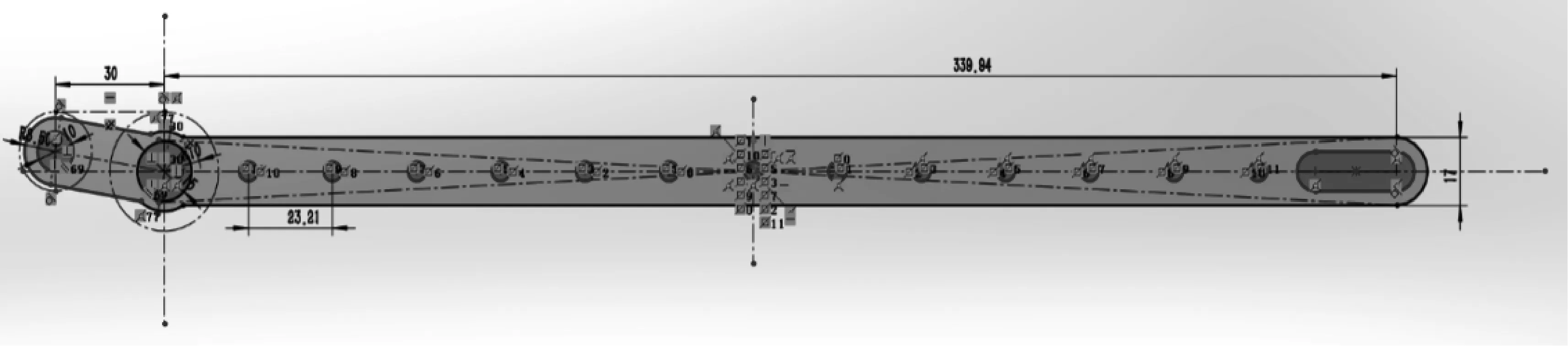
图2 前后段外板结构
2.2.1 测算操作
为确保装置能够顺利进入准备姿态,需要测量出装置后底部据第一阶右上角的距离,HC-SR04超声波模块感应角度不大于15°,探测距离为2~450 cm。其采用IO触发测距,触发信号大于10 us的高电平信号,并且模块自动会发送8个40 kHz的方波,自动检测是否有信号返回,若有信号返回,通过I/O输出一高电平,高电平持续的时间就是超声波从发射到返回的时间,通过公式计算得出水平距离[2]。
测试距离 =[高电平时间×声速(340 m/s)] /2
E18-D80NK红外光电传感器为NPN型光电开关,它集信号接收与发射于一体,检测距离为3~80 cm,直接为数字量输出,不需要使用ADC信号转换。使用方便、成本低、容易安装、不易受到日常光源的影响,比较适合本设计使用[4]。红外测距传感器有一对红外信号发射与接收二极管,红外测据传感器发射一束红光,经物体反射接收,利用信号发送与接收的时间差,处理后获得物体的距离[5]。

2.2.2 鉴定操作
首先,装置测算出距离l,x后,需要由软件程序鉴定弦l长度是否合适及后段履带能否顺利搭上阶梯,如图3所示。其次,通过超声波传感器判定是否处于安全合适位置,鉴定模块软件流程如图4所示。
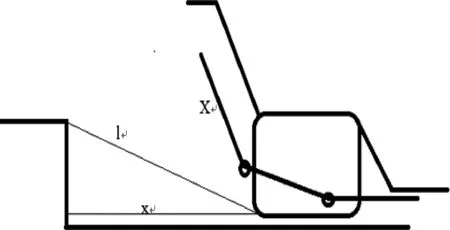
图3 测算后鉴定状态

图4 鉴定模块程序软件流程
2.3 自检模块
当装置完成准备模块时,需要将两段的履带自我检查是否已达到往下转动的角度,并且将一直持续在轮椅攀爬运动过程中,确保装置的安全和稳定。在本轮椅的前后两段各适配一个红外光电传感器,可以检测前后是否达到地形表面[6]。当前后两端的红外传感器检测到距离小于履带前或后长度时,其信号端会输出信号0,单片机I/O口会收到电压信号,程序判断单片机会控制装置是否继续驱动前进。
2.4 驱动模块
驱动模块L298为高电压、高电流、四通道驱动,可接收DTL或者TTL逻辑电平,驱动感性负载和开关电源晶体管。L298N可直接对电机进行控制,无须隔离电路,可以驱动双电机。当使能端为高电平时,输入端IN1为PWM信号,IN2为低电平信号时,电机正转;输入端IN1为低电平信号,IN2为PWM信号时,电机反转;IN1与IN2相同时,电机快速停止。当使能端为低电平时,电动机停止转动[5]。
3 软件设计
由于轮椅的特殊性,需要考虑装置的安全性和稳定性,随时利用自检模块对装置自身进行检查,来确定自身的安全性、稳定性。当轮椅启动攀爬程序后,整个控制系统由供电模块进行供电,单片机开始执行预设程序,进行各个模块的初始化操作。由准备模块开始负责轮椅最佳起手运行姿态,经过AD转换,单片机将得到开启攀爬模式时装置离第一阶的阶棱的距离l,经程序把l与固定值X(在探手长度30 mm范围内)比较,当大于X时,单片机会控制向后前进,由超声波传感器来传递移动值给单片机,直到移动值在15 mm左右时停止;当小于(X-30)mm时,会向前倒退15 mm,与上相同,移动后返回上一步测算操作,即重新初始化红外传感器数值与其所在角度,得到l1,继续判定循环,直到ln满足条件。若一开始满足条件则继续向下执行自检模块。准备结束后,单片机将得到程序指令开启定时器,在第一秒时执行自检模块,开启前后红外传感器,再经过AD转换得到距离y1,y2当y1 本设计实现了对轮椅为适应多变地形的智能控制,硬件方面利用独特的3段履带式结构,大大减少了地形对用户的危险,增加软件的容错率并简化了操作;软件方面轮椅能够让用户切换攀爬模式,在攀爬模式下可以利用每一秒运行的自检模块时刻最大化地保证用户的安全,为多地形智能轮椅的发展提供了更为实用的方向。4 结语
