激光故障条件下舰载光电跟踪目标测距方法研究*
2020-12-02位宝燕杨绍清刘松涛
位宝燕 杨绍清 刘松涛 余 琦
(1.海军大连舰艇学院导弹与舰炮系 大连 116018)(2.92118部队 舟山 316000)
1 引言
在现代海战中,舰载光电跟踪设备跟踪目标实时性好、清晰直观、跟踪精度高,在海上目标精确测量、导弹预警与拦截等均发挥至关重要的作用。但在真实的作战情况中,舰载光电跟踪系统的激光测距仪发生故障,则无法获取跟踪目标的距离信息,缺少目标精准的坐标点。这种情况下,现有的光电跟踪系统是无法自动获取目标距离,通常是由指挥员按照经验目测距离,误差较大,此时在战场上就会陷入较被动的局面。因此在激光故障特殊条件下,如何对战场目标快速精确地进行目标距离测量,进而实施目标打击或者拦截,成为目前迫切需要解决的问题。
为了解决上述问题,利用舰载光电跟踪系统中的电视跟踪仪和红外跟踪仪,创建了异源双目立体测距系统。首先,对红外图像进行预处理,红外与可见光图像特征点配准,得到配准的坐标点集,最后根据视差原理获取跟踪目标的距离信息。基于舰载光电系统的实际情况进行条件假设,对双目立体测距系统进行仿真,并分析了影响测距的因素。
2 移动异源双目立体测距跟踪系统
2.1 光电双目测距原理
物体在左右视网膜上的光学投影位置不同,所以人眼可以感知到物体的距离。双目立体视觉系统[1]利用两台相机模拟人眼,基于视差原理[2]得到物体的距离信息,实现物体的三维重建。
双目立体视觉测距系统分为双目汇聚式模型[3]和双目平行式模型[4],双目汇聚式模型的特点是两相机光轴无需保持平行,光轴在空间里聚于一点,双目平行式模型是双目汇聚式模型的特殊情况,两相机的光轴需要保持在相同的高度,保持平行[5]。根据舰载光电跟踪仪相机长焦距、窄视场的特点,所以选择双目汇聚式模型,跟踪目标置于视场中间的位置。
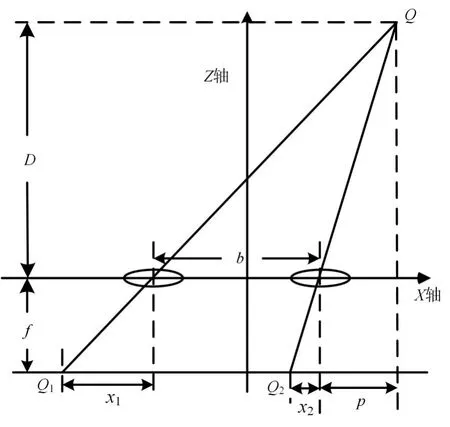
图1 双目测距成像俯视图
图1是双目汇聚式模型的俯视图,假设两相机的焦距相同,以世界坐标系为参考,原点O为两相机 中 心 位 置 ,Q(xw,yw,zw) 为 跟 踪 目 标 点 ,Q1(x1,y1)、Q2( )x2,y2是相应的像点,x1-x2即为成像视差,b是基线距离,即左右两相机光心之间的距离。根据三角形相似原理可得:
由式(1)和(2)可以推出下式
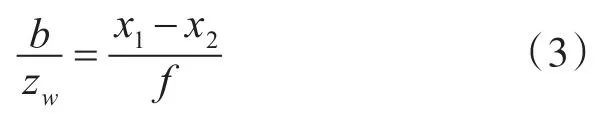
令d=x1-x2,d即为视差,则目标距离为

2.2 光电双目测距跟踪系统设计
该系统硬件组成示意如图2所示,包括中心计算机、云台、电视跟踪仪、红外跟踪仪。
图2 测距跟踪系统的硬件组成
2.3 光电双目测距跟踪系统工作流程
整个系统工作流程建立已完成标定基础上。首先在红外和可见光图像中对跟踪目标进行手动初始化,两相机逐帧跟踪目标。在红外图像中提取目标特征点,与可见光图像的目标图像进行匹配,得到若干组已匹配的特征点对,利用式(4)得到目标距离的平均值,完成对目标距离的测量和三维重建。该方法流程如图3所示。

图3 双目测距跟踪系统工作流程图
3 海面舰船红外与可见光图像配准
由于成像原理不同,红外与可见光图像的灰度特性不同,但角点和边缘特征相似。然而红外图像根据目标的辐射特性成像,图像较可见光图像更模糊,且目标边缘的轮廓不突出。因此首先对红外图像进行预处理,突出边缘轮廓,提取角点,最后利用相似性度量进行匹配。
3.1 红外图像增强预处理
图像增强[6]是最基本的图像处理技术,一般分为空域图像增强和频域图像增强,本文用直方图均衡化[7]、直方图规定化[8]和小波变换[9]等常见方法对红外舰船图像进行增强,效果如图4,可以看出效果并不理想。
除了上述算法,还可以采取边缘提取增强技术,本文采用Sobel算子、Robert算子、Prewitt算子、Log算子等、Canny算子和Susan算子[10]对红外舰船图像进行边缘提取,结果如图5所示。从结果可以看出Sobel算子对边缘提取效果较好。
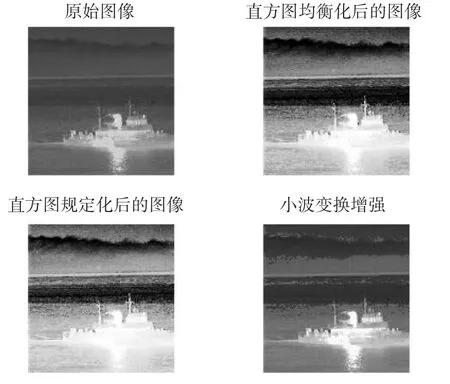
图4 红外图像增强
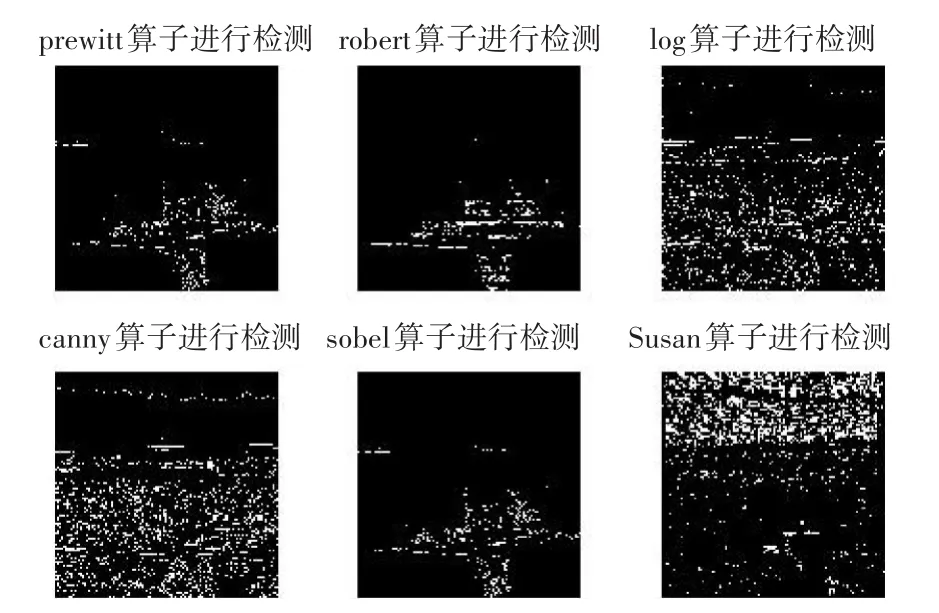
图5 红外图像边缘提取算法结果
3.2 图像Shi-Tomasi角点提取
对红外图像进行Sobel算子边缘增强预处理之后,对红外和可见光图像提取角点。角点是边缘轮廓上曲率极大值点,比其他边缘点鲁棒性更好[11]。文献[12]提出改进Moravec算子,通过滑动二值矩形窗口寻找灰度变化的局部最大值,但是运算速度不快,对尺度变化敏感。文献[13]对Moravec进行改进提出Harris角点,用图像梯度近似灰度变化,提高了特征点的检测率,但是计算量大,对尺度和噪声敏感。Shi和 Tomasi提出改进 Shi-Tomasi[14]特征,该算子较Harris算法提取角点数量少,特征明显,计算速度快,能满足实时性要求。
Shi-Tomasi算法的检测原理是通过窗口W(x,y)在各个方向滑动时灰度变化。当窗口移动(Δx,Δy) 时,灰度变化为

式中ω(x,y)为加权函数,通常选用高斯加权函数,I(x,y)为点(x,y)处的灰度值。
由:I(x+Δx,y+Δy)=I(x,y)+IxΔx+IyΔy+O(Δx2,Δy2)得:
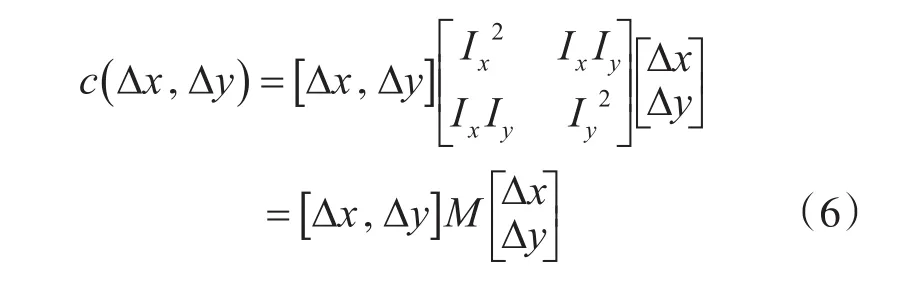
其中M是2*2矩阵,可由图像导数得:
计算M的两个特征值λ1,λ2,只有当两个特征值均小于阈值,则认为是有效的角点,即为Shi-Tomasi角点,既该角点周围存在至少两个不同方向的边界。图6即为红外图像Shi-Tomasi特征点集。

图6 红外舰船图像Shi-Tomasi角点
3.3 红外与可见光图像的特征点匹配
经过特征点提取,分别得到红外与可见光图像的特征点集A和B。红外特征点集A中任一点ai,在点左右选取一个大小为m×m的窗口Am,相对应于红外图像上ai点相同位置处对于可见光图像选取一个大小为n×n(n≫m)的窗口Bn,将Bn中包含的特征点与ai计算去均值归一化积相关系数,计算公式如下:
将窗口Bn中去均值归一化积系数最大值的特征点作为ai的匹配点。当去均值归一化系数最大值小于阈值时,说明该特征点在待配准图像中特征点集B中无匹配点。图7给出了基于Shi-Tomasi角点相关配准算法的基本框图。
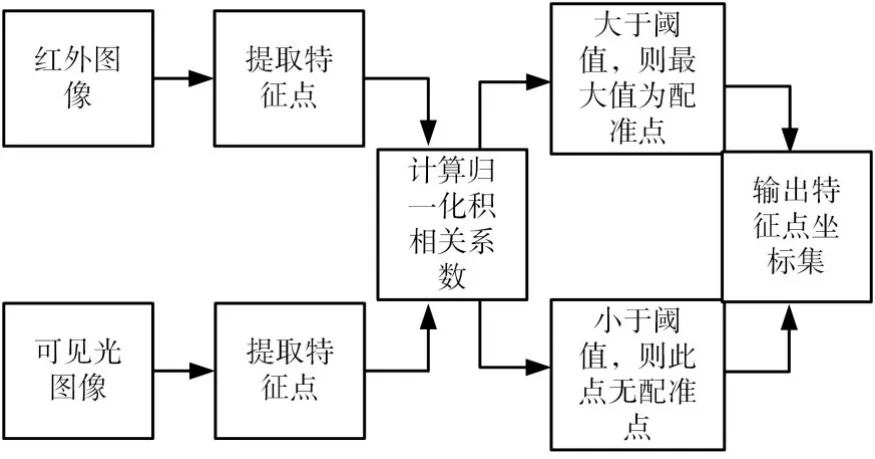
图7 基于Shi-Tomasi角点相关配准算法的基本框图
4 仿真实验结果与精度分析
实验所用图像分别针对海面目标和海岸目标两种类型,仿真编程平台为Inter i5 CPU,4GB内存的PC上使用Matlab编程实现。将两组图像命名为Ship和Building,采用基于Shi-Tomasi角点相关配准算法进行特征点匹配,结果如图8和图9,两组图像均得到五组特征点集。通过实验结果可得,本文提出的基于Shi-Tomasi角点相关配准算法可以准确匹配红外图像与可见光图像的特征点。

图8 Ship图像特征点配准结果图像

图9 Building图像特征点配准结果图像
通过对红外和可见光图像特征点提取及匹配,得到特征点集,将特征点集代入式,得到目标的平均距离。假设红外相机与可见光相机共用一个伺服,焦距取500mm,镜头视场为1°,相机传感器像元尺寸为6μm×6μm,像素数量为2048*1024,基线距离为2m,若视差最大为1000像素,最小为10像素,则根据公式可得测距范围的理论值为163m~16.7km。
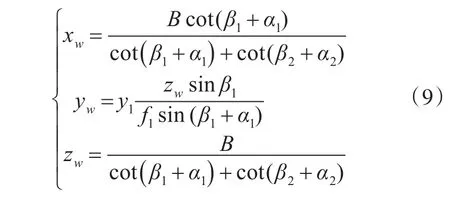
但是此式是在理想情况下得到的距离计算公式,实际在舰船应用中,相机光轴可能无法完全平行,存在大小为β的偏差,这时需要对系统进行校正,基于双目测距系统特点与实际应用情况,得到测距系统误差模型如图10。
如图10模型所示,为了简化模型,坐标原点置于左摄像机的中心点,P点和光心连线与相机光轴夹角为β1和β2,光轴与x轴夹角为α1和α2,根据以上条件和几何关系可得P点坐标为
双目视觉系统测距主要是基于视差,所以设两个相机在x方向上的精度分别为δx1和δx2,则目标点的z坐标的测量精度为


图10 测距系统误差模型
1)红外图像与可见光图像配准得到的特征点坐标精度δx1和δx2对测距精度影响较大,精度越高,测距误差越小。坐标精度完全是由软件方面决定,不需要改动硬件设施条件就可以进行改进,提高测距精度。
2)两相机的有效焦距与测距精度成正比。舰载光电跟踪系统一般应用长焦距镜头,但是焦距越大,视场就会变小。
3)像元尺寸对测距影响主要是影响视差值。若目标距离一定,视差值越小,测距误差就越大。
4)基线对于测距误差的影响不是简单的线性关系。这是由于基线距离的改变会引起目标与光轴的夹角变化,张广军[15]对此进行深入研究。最终得出当基线距离大约为目标距离的两倍时,测距误差最小;当基线距离小于目标距离的两倍时,基线距离越大测距误差越小。但在实际应用中,舰船长度有限,而且一般对中远距离目标进行跟踪,所以基线距离一定是小于目标距离的两倍。因此在应用中,应尽可能地将基线距离增大。
5 结语
为了解决舰载光电跟踪系统中激光测距仪突发故障无法测距的特殊情况,本文基于舰载红外和电视跟踪仪设计了一种异源双目视觉测距系统,给出了目标距离的测量方法。首先详细介绍了异源双目测距跟踪系统的测距原理、组成结构以及工作流程,然后根据原理进行相应地算法设计完成测距。对红外图像运用Sobel算子进行图像增强处理,然后运用Shi-Tomasi特征点相关算法进行图像配准,提取Shi-Tomasi角点,并用相似系数对两幅图像的角点进行匹配,用海面和海岸两组图像进行仿真实验,实验结果成功得到了两组特征点的坐标点集。最后分析在实际应用中的误差情况,得出视觉系统的误差模型,并在理论上分析了影响测距精度的因素。总之,在激光测距仪突发故障无法测距时,利用现有红外跟踪仪和电视跟踪仪也可使舰载光电系统对中远目标具备测距能力,并有一定的精度,以代替人工估量测距。
