多无人艇协同作战智能指挥控制系统研究*
2020-12-02
(海军大连舰艇学院信息系统系 大连 116018)
1 引言
水面无人艇又称USV(unmanned surface vessel),是一种具有自主航行与路径规划能力,可搭载不同任务载荷,能够完成多种任务的水面舰艇。将人工智能运用到水面无人艇上,可以极大地提升无人艇的自主能力。由于未来作战模式的改变,无人装备代替有人装备执行任务的必然趋势将使无人艇在未来海上作战系统中占据重要的地位,随着无人艇技术的快速发展,无人艇必将更加智能化、规范化、集群化。水面无人艇编队协同联合作战是未来海军作战的主流趋势,人艇协同作业可以丰富海上行动的战术战法、协调执行机构的空间搭配、提升分布式探测与执行的能力并且降低作业的耗损。
2 无人艇作战的特点
水面无人艇作为一种新型的水面智能化、无人化作战平台,能够执行警戒巡逻、侦察监视、反潜反水雷、海上救援和海上打击等多种任务[1]。具有工作持续时间长、成本低、执行任务过程中无人员伤亡的特点,能够在危险海域执行任务并且可以有效地提高战略要地和舰艇编队的安全防护能力。因此,无人艇凸显出巨大的军事价值并将会在未来的海上作战中发挥重要的作用。
水面无人艇区别于有人舰艇的最大特点是“人在环上,不在艇上”[2]即操控人员在远离无人艇的地面或舰船上,对无人艇进行更高级别的、战略战术上的指挥控制。但由于海洋环境复杂多变,要求无人艇在执行任务时能进行有效分析、实时调整策略,并对任务执行过程中遇到的突发事件有快速反应的能力。这就要求无人艇必须具备自主性,包括自主航行、自主避碰以及自主决策等能力,这些能力需要作战控制系统具有高度智能化,自动化。
在水面无人艇编队协同联合作战时,编队指挥中心会对无人艇下达作战任务进行人艇协同,无人艇在执行任务时,必须保证与其他无人艇的高度协同,通过多艇联合弥补单艇在高度动态的水域中的能力不足,这就要求无人艇具备交互性和协作性,只有这样才能充分发挥水面无人艇艇群灵活、部署快、监控范围广,作战组织灵活、抗毁重构性强等优势。
综上,水面无人艇协同作战智能指挥控制系统的特点如下。
1)高度的自主性
无人艇能够根据编队指挥中心下达的作战任务和在上级指挥节点允许的范围内进行自主规划、决策和行动,并在探测到战场环境发生变化时,做出相应的反应。
2)信息的分布性
编队指挥中心,具有全局的情报信息、决策信息和上级的命令,而战场的态势信息时刻变化,分布于各无人艇,只有通过对这些信息的共享,才能做出有效的战术决策,采取相应的作战行动。
3)协同的复杂性
协同分为人艇协同和艇群间协同,人艇协同的操控台与无人艇在空间上是分离的,处于分布式状态,操控台需要收集分析编队整体的情报信息和无人艇艇群发回的情报和决策信息,以制定相应的战术战法。艇群间协同时,无人艇不仅要根据已探测到的战场环境自主制定作战方案,还需与其他无人艇交互,互通有无,以获得更多更详尽的信息,并随时根据新的情报信息采用新的行动计划与其他无人艇协作执行任务。
3 Agent技术概述
Agent技术是随分布式人工智能的研究发展起来的,它是存在于某个环境之中具有自主控制能力、具有某种思维特征、能够接收环境(包括人工和其他Agent)刺激并作出相应反应的行为实体[3]。
通常将分布式系统中具有自主性,交互性,反应性,智能性,适应性和可通信性的计算实体称为Agent。Agent作为一个计算实体能独立寻找和获取资源,在动态的环境中解决实际问题;能与其他Agent交互,并相互依赖相互制约;能感知外部环境并作出相应的行动;具有一定程度的智能,包括推理、自学习等并能从自身的经历,所处的环境和其他Agent的交互中学习;可以进行信息的交换,多Agent的协作、协商都是以通信为基础。
Agent的智能与结构紧密相关,可以分为认知型Agent、反应型Agent和混合型Agent。认知型Agent被看作是一种意识系统,能够模拟或表现出被代理者具有的意识态度,是一个基于知识的人工智能系统[4],它的结构如图1所示。
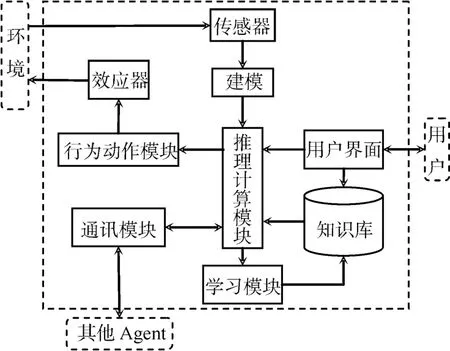
图1 认知型Agent的结构
1)用户界面:用户可以通过用户界面向知识库中添加规则,也可以直接通过该界面将命令和决策发给推理计算模块从而控制Agent的行为和通信。
2)知识库:用于存储用户增加的和通过学习模块学习获得的知识。
3)推理计算模块:利用已有的知识,结合用户的命令信息和其他Agent的协商信息,生成具体的决策,并将决策信息发送到行为动作模块。
4)学习模块:Agent能够在与环境和其他Agent的相互作用中“学习”和“积累经验”,并能根据学到的经验丰富知识库从而改变自身的结构和行为策略。
5)行为动作模块:负责接收并执行具体的决策,将决策分解为一系列的行动或任务,并将其传送到效应器。
6)效应器:分配或调用底层不同的效应器来执行行为动作模块的行动或任务。
7)通讯模块:负责与其他Agent的通信。
8)传感器:负责收集周围的环境信息。
9)建模:将收集到的环境信息翻译成为准确、恰当的描述符号。
反应型Agent仅执行从传感器到效应器的简单映射,通过触发规则对环境的变化或来自其他Agent的消息产生反应,执行预先指定的条件-动作规则,它的结构如图2所示。
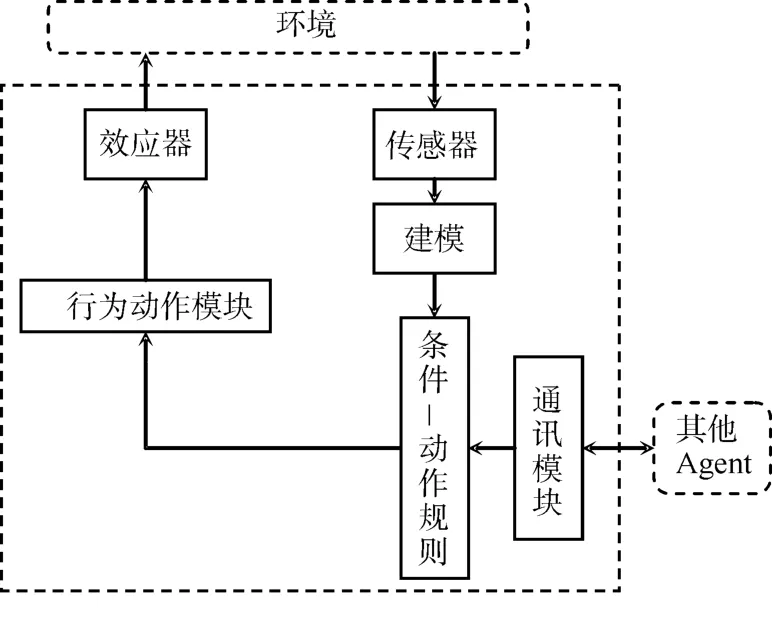
图2 反应型Agent的结构
认知型Agent具有一定的智能,符合人们的思维习惯,能够进行复杂的推理,但其对环境的变化难以做到快速响应;反应型Agent能够根据环境的变化做出快速的反应,但Agent的行为与所处系统的整体行为和全局的目标缺乏关联性。混合型Agent可以有效地发挥上述两种结构的优势,采取分层的设计结构,在上层强调Agent的自主性,能通过机器学习,或在与其他Agent的交互中,使其知识不断增加,能力不断增强,具有更高的智能。在下层则强调实时性,能够快速应对外部环境的变化。这种特性更符合战场作战实际,具有更广阔的应用空间,可以大幅提升无人艇的作战能力[5]。
将Agent技术用于无人艇协同作战智能指挥控制系统,能够满足系统对协同复杂性,自主性和信息分布性的要求,并实现无人艇的智能化协同作战。
4 基于Agent技术的无人艇协同作战智能指挥控制系统
4.1 无人艇作战过程分析
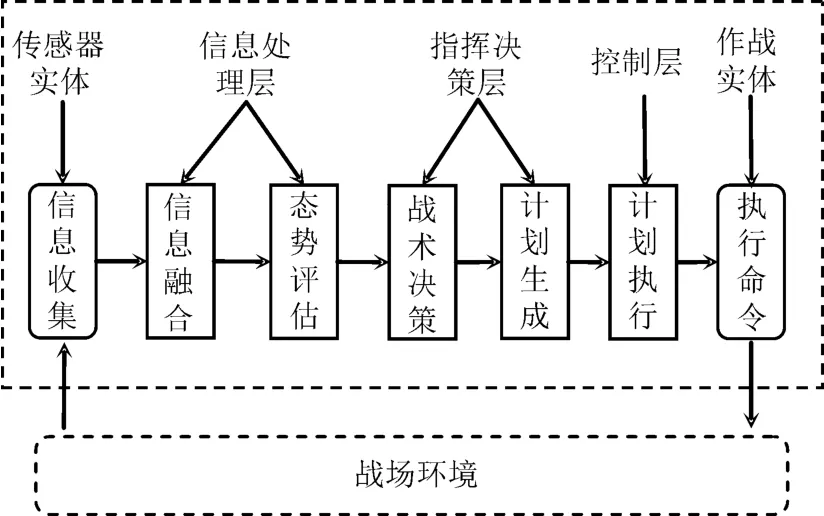
图3 无人艇指挥决策过程
要建立基于Agent的水面无人艇智能指挥控制系统,应当对作战指挥的决策过程进行系统的分析。首先来看传统水面舰艇指挥决策过程,主要分为信息,决策,行动,舰艇将辅助决策方案提供给指挥员,由指挥员选择最终的执行方案,舰艇平台的控制并不在指挥控制的范围之内,例如水面舰艇需要进行武器发射占位时,平台的机动是在人为的控制下完成的。而对于无人艇而言,其生成的决策方案就是最终的执行方案,而其搜索攻击目标等行为与对无人艇平台的指挥控制紧密的结合在一起。所以无人艇的指挥决策过程应如图3所示,分为信息处理层、指挥决策层、控制层。
信息处理层包括信息融合和态势评估,接收各传感器收集到的信息和数据按一定准则进行综合分析、处理,并根据融合后的航迹数据、理论数据和性能数据反应真实的态势,将得到的战斗力分布信息、活动和战场周围环境与地方作战意图和机动能力结合起来,作为指挥决策的基础数据;指挥决策包括战术决策和计划生成,根据态势信息,按预先设定的战术原则,生成最终的决策和行动方案,如战斗发起时间、战法、兵力部署、任务协同等,可在指挥决策层的权限范围之内通过控制层对无人艇其他各系统进行指挥控制[6];控制层包含计划执行,用于执行生成的行动方案,可以同时对无人艇进行机动控制和武器控制。
4.2 水面无人艇单艇Agent的结构分析
结合混合型Agent与无人艇指挥控制过程,将用户和用户界面抽象为编队指挥中心,将推理计算模块、知识库、学习模块抽象为决策规划模块,将建模抽象为信息处理模块,将行为动作模块抽象为控制模块,将条件-动作规则抽象为反应模块,如图4所示。
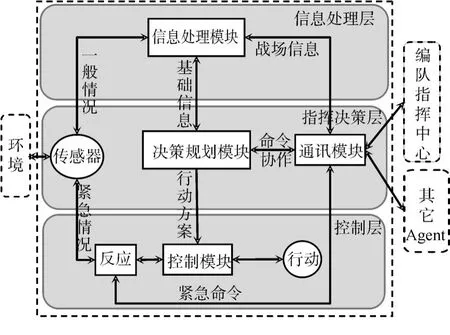
图4 无人艇单艇Agent的结构分析
1)信息处理模块
接收来自传感器、其他Agent和编队指挥中心的外部信息以及无人艇内部信息,对收集到的目标信息进行相关的分析,数据融合和敌我识别等,并实现对战场态势的综合评价,以此估计敌方的兵力部署和作战计划。
2)决策规划模块
根据作战对象、战场态势和上级作战意图,结合预先设定的战术原则,进行战术方案分析计算和优选,将优选的决策结合知识库中的战术规则进行行动方案的规划,并对作战任务进行动态的分配和管理。
3)控制模块
主要控制无人艇的机动,传感器的综合检测,提供相应的武器通道组织方式、控制相应武器的使用等[7];可以根据预先制定的条件-动作规则,对传感器传送的紧急情况进行相应的处理,也可以根据通讯模块传送的战场变化情况做出更加合理的应急反应。
4)反应模块
根据紧急情况制定的条件-动作方案。
5)通讯模块
在Agent与编队指挥中心之间、Agent实体之间传输战场信息、协商信息和命令。
4.3 基于Agent的无人艇智能指挥控制系统在编队中的应用
现代海战编队协同作战体系中,指挥决策系统更集中体现着信息的共享,包括态势信息、协同决策信息、作战意图信息等。其目标在于对抗条件下能够获取信息优势并将之转化为决策优势,从而进行快速有效的指挥决策,迅速实施作战行动,提高编队协同作战能力,将己方的作战潜力最大限度地转换为战斗力[8]。将基于Agent的无人艇智能指挥控制系统应用于编队中可以高效地在无人艇和有人艇之间共享信息,如图5所示。

图5 基于Agent的无人艇编队智能指挥控制系统架构
1)自主决策Agent:一方面接受来自编队指挥中心和协同决策Agent分配的任务,其中编队指挥中心优先级要高于协同决策Agent,依据相应的命令进行单机作战;另一方面将本机探测到的情报信息、决策信息发送给其他无人艇的自主决策Agent和协同决策Agent。
2)协同决策Agent:每艘无人艇都有一个协同决策Agent,由信息处理层和指挥决策层构成,其中只有无人艇指挥节点的协同决策Agent为主用Agent,其他为备份节点,在主用无人艇受损时迅速承担起该节点的功能[9]。负责综合全局的信息,得出战场态势,并结合编队指挥中心的命令,对己方各无人艇分配目标,制定协同战术,并将结果发送给数据库[10]。
3)有人艇指控系统:根据各艇传送的情报和预先制定的计划,从全局的角度制定攻击的辅助决策并交由指挥员进行最终决策的确认。
4)数据库:获取并存储协同决策Agent和有人艇指控系统的输出结果。
5 系统的工作过程
水面无人艇可以在己方基地、舰艇附近或敌方潜艇航道等指定区域自主执行搜索、警戒、监视、攻潜等多种任务[11]。现以无人艇编队对潜应召平行搜索为作战任务背景,阐述系统的工作过程。
无人艇采用“发现即打击”、“侦-打”一体的反潜理念,即发现敌方潜艇、攻击敌方潜艇并且摧毁敌方潜艇[12],其任务的主要目标是保障编队指挥中心安全和己方后续作战任务能够顺利完成。
假设任务空间中有一艘敌方潜艇:QT,编队指挥中心仅收到应召搜索的相关指示,并派出4艘无人艇前往进行搜索,其中USV2为无人艇编队指挥节点,参见图6。虚线表示原定搜索线路,实线表示实际搜索线路。
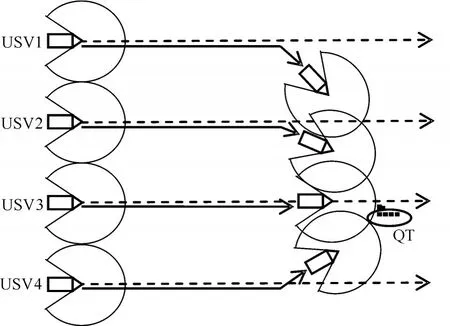
图6 多艘无人艇反潜搜索示意图
系统开始工作时,编队指挥中心发布命令,无人艇指挥节点收到有关潜艇最后位置的数据或应召搜索指示后,立即通过协同决策Agent制定协同战术,组成搜索队形,全速到达开始搜索线,按战术设定路线进行搜索;4艘无人艇上的自主决策Agent在航行中不断探测外界环境、结合作战任务要求自主对路径、威胁规避、目标确定等选择做出决策,并发布情报决策;当某一艘USV发现潜艇目标QT时,将这一情况发布给USV2上的协同决策Agent,并广播给其它USV上的自主决策Agent;无人艇指挥节点上的协同决策Agent立即制定新的战术规则,如重新进行态势分析,规划编队整体追击任务,给USV1、USV3、USV4发布追击任务,并将结果发送给编队指挥中心;各无人艇的自主决策Agent根据分配的追击任务,重新制定航行、攻击策略。同时,编队指挥中心在收到搜索任务的最新态势后,如对新战术不满意,可直接向协同决策Agent或自主决策Agent发布干预命令。如果编队指挥中心认可协同决策Agent制定的战术方案,则无人艇编队按计划对潜艇进行围堵并攻击。在整个搜索过程中,探测,自主航行,协同决策等过程一直进行。
6 结语
本文将Agent技术与无人艇相结合,介绍了基于Agent的水面无人艇协同作战智能指挥控制系统。在分析无人艇作战特点和Agent组织架构特性的基础上,充分发挥单个Agent的自主性以及多Agent的交互性和协作性,大大提高了无人艇遇突发情况的处理能力,信息的共享能力,协同作战的决策能力。使无人艇指控系统更加智能化,可使战场中的各种信息资源实现共享,战场态势实时感知,战术决策速度加快和自主协同打击能力提高。
