细圆柱体的夹持装置结构设计
2020-11-29肖学才贾晓宇张海军吴锋杰
肖学才 杨 琴 贾晓宇 张海军 吴锋杰
(1.嘉兴学院机电工程学院,浙江嘉兴314001;2.嘉兴学院数理与信息工程学院,浙江嘉兴314001;3.嘉兴市第二医院呼吸科,浙江嘉兴314001)
0 引言
随着医疗技术的进步,手术操作中的自动化、智能化程度要求越来越高,自动实现一些细圆柱体件(穿刺针杆等)的抓取显得非常有必要。细圆柱体由于本身刚度低,夹持时如果用力过大,容易出现变形,另外还有可能出现翘曲、鼓形、锥度过大等现象,使器件报废[1-2]。为此,设计一套细圆柱体的夹持装置,辅助医疗手术操作,提高手术操作效率,成为医疗器械设计中一个迫切需要解决的研究课题。
细圆柱体件由于直径尺寸较小,通常小于5 mm,传统的夹持装置难以实现有效夹持,用力过大,则使其变形,用力过小,则让其滑落。本文首先给出夹持装置的方案设计;其次,利用三维建模软件,给出夹持装置的结构模型;最后,对夹持装置的执行部件自由度进行了计算,以验证其运动的合理性。
1 方案设计
由于夹持物(细圆柱件)载荷较小,细圆柱体夹持装置的驱动利用微型电机来实现,结构上主要由底板、支撑轴、微型电机、轴、齿轮减速部件、臂板等零部件组成。
首先,两块底板通过支撑轴连接在一起构成夹持装置的底座,其中,支撑轴与底板之间利用螺栓来连接,如图1所示。
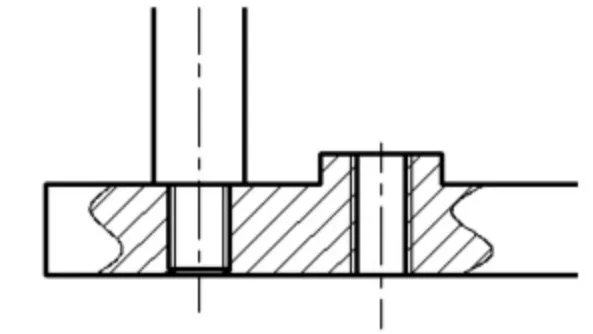
图1 底座螺栓连接结构
其次,在底座上安装微型电机加齿轮减速部件,通过电机输出扭矩来带动夹持装置实现水平面内360°转动,齿轮和夹持装置通过4个M8螺钉连接固定,如图2所示。齿轮减速部件中,小齿轮齿数取Z1=17,大齿轮齿数取Z2=3×17=51,传动比为再次,在夹持装置摆动关节处也采用电机与齿轮减速装置来驱动,使臂板实现上下摆动,如图3所示。

图2 夹持装置水平面360°转动结构
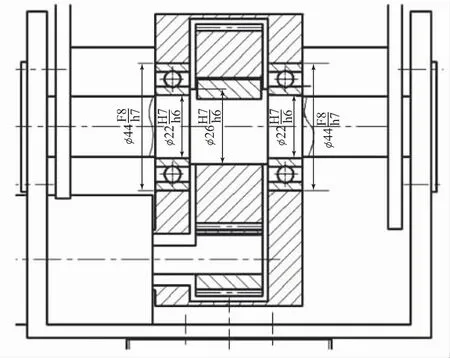
图3 夹持装置摆动关节处结构
最后,为实现对细长圆柱体件的有效夹持,通过微型电机带动大齿轮,然后齿轮通过臂板带动手爪,使两只爪向中间运动,实现夹紧动作,如图4所示。
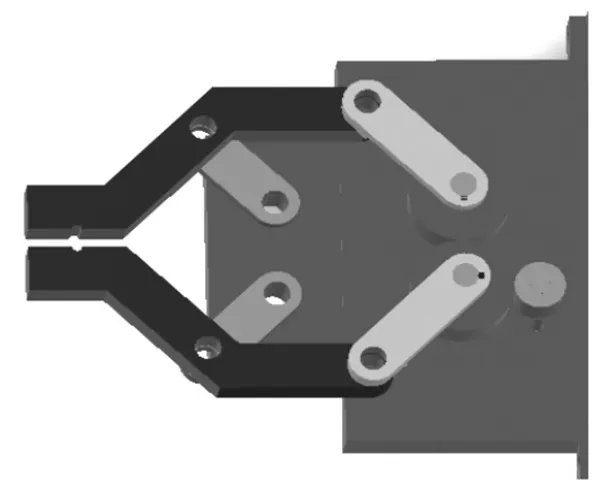
图4 夹持装置执行部件结构模型
与平面二维图形相比,夹持装置的三维结构模型更加直观。根据上面的方案设计,利用三维建模软件Solidworks绘制了整个夹持装置的结构模型,如图5所示。

图5 夹持装置结构模型
2 执行部件机构自由度
由机械原理[3]可知,机构要实现确定的运动,必须满足一定条件,即机构原动件的数目与机构自由度数目相等。在细圆柱体夹持装置中,执行部件机构最为关键。为此,根据前面绘制的执行部件结构模型,绘制其机构简图如图6所示。
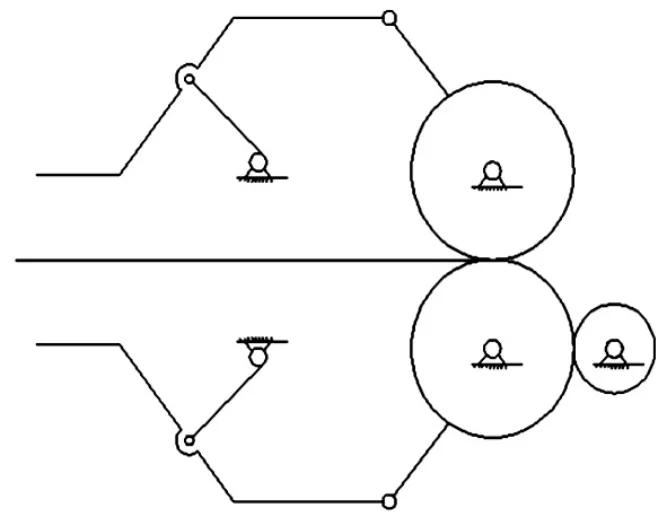
图6 夹持装置执行部件结构示意图
容易看出,机构中具有7个活动构件、9个低副、2个高副,则根据机构自由度计算公式:

机构自由度与原动件的数目相等,表明机构具有确定的运动轨迹,验证了机构设计的有效性。
3 结语
本文利用Solidworks三维建模软件,完成了细圆柱体的夹持装置结构设计,能够实现细圆柱体的空间夹持功能,为细圆柱体的夹持装置结构设计做了有益的探索。
