基于模糊滑模控制算法的欠驱动控制器研究*
2020-11-27罗文辉张宪文徐进钊邱光繁杨达明张建民王天雷
罗文辉,张宪文,徐进钊,邱光繁,杨达明,张建民,王天雷※
(1.五邑大学智能制造学部,广东江门 529000;2.江门市蒙德电气股份有限公司,广东江门 529000;3.恩平市奥达电子科技有限公司,广东江门 529030)
0 引言
桥式吊车是一种十分常见的装配运输工具,由于具有负载能力强、适应性强等优点,在港口、仓库、建筑工地等场所得到了广泛的应用。但在实际运行过程中,其性能受负载摆动的限制,不利于工业安全和降低吊车系统的工作效率。因此,使桥吊小车能快速定位并有效地消除吊具摇摆是控制领域研究的热点问题之一。唐超等[1]提出了一种基于线性自抗扰控制和控制器参数优化的欠驱动桥式吊车控制策略,该方法不需要对吊车模型进行任何近似解耦或线性化处理,允许模型存在一定的不确定性并且考虑了系统所受的摩檫力与空气阻力等干扰。Ayhan 等[2]针对一种具有时变参数的桥式吊车,为了实现最小摇摆角的位置跟踪,采用了增益调度控制方法,将载荷质量、绳长等时变参数作为调度参数,然后利用线性矩阵不等式设计了LQR 控制器。然而,这些基于线性化起重机动力学的方法可能会失去足够的位置和负载摆动信息的准确性,从而导致一些不确定的因素降低这些起重机的控制性能。
随着非线性控制技术的发展,许多基于桥式吊车系统的非线性控制方法被提出,如滑模控制[3-4]、最优控制[5-6]、耦合控制[7-8]、模糊控制[9-10]。其中最为典型的是滑模控制,其是一种鲁棒非线性反馈控制方法,具有响应速度快、不受系统参数和外界干扰影响的特点,是解决桥式吊车控制问题的良好工具。近年来,针对欠驱动系统滑模控制器,国内外学者展开了大量的研究工作。 Lin 等[11]设计出了一种具有双层滑模面的控制器,并且采用模糊系统来调节第二层滑模面的系数,虽然加强了系统的鲁棒性,但使得整个系统的稳定性证明变得复杂。Lo 等[12]同样也设计出了一种具有聚合式分层递阶结构的滑模控制器,但是在理论上对于该控制器的稳定性并没有给出严密的证明,并且也没有讨论子滑模面上的各个系统状态的收敛性。因此,针对基于聚合式分层递阶结构的滑模控制器,虽然已经展开了一定的研究工作,但是对于系统的稳定性分析方面都存在着难于严格证明的问题。
针对文献[11-12]中存在的稳定性问题,王伟等[13]提出了一种欠驱动系统的新型滑模控制方法。该方法将系统状态变量线性组合来引入中间变量,然后利用中间变量定义滑动面, 通过计算总的控制量保证在有限时间内,中间变量能够收敛到平衡点,随后进一步利用LaSalle 不变性原理证明该收敛域内只有一个平衡点且是渐近稳定的。该方法很好地解决了上述稳定性问题,但是对于抖振抑制考虑却不太充分。
针对文献[13]提出的新型滑模控制方法以及存在的抖振问题,本文提出了一种将滑模控制方法与模糊调节器相结合的桥式吊车防摆控制方法。通过将系统状态分为两组来引入中间变量,然后根据中间变量定义滑动面,利用Lyapunonv直接法推导出系统的控制率,使滑模面渐进稳定,然后针对滑模可达性与控制器增益之间的关系,设计了模糊接口系统来调节控制器增益。与传统离散滑模控制进行仿真对比分析,仿真结果表明了该方法的可行性与有效性。
1 桥式吊车系统的非线性动力学模型
桥式吊车动力学模型如图1所示。负载通过吊绳与台车相连,台车在水平力F驱动下在桥架上沿x方向运动,并受到摩檫力f的干扰,在运动过程中,台车的运动会引起负载的摆动。
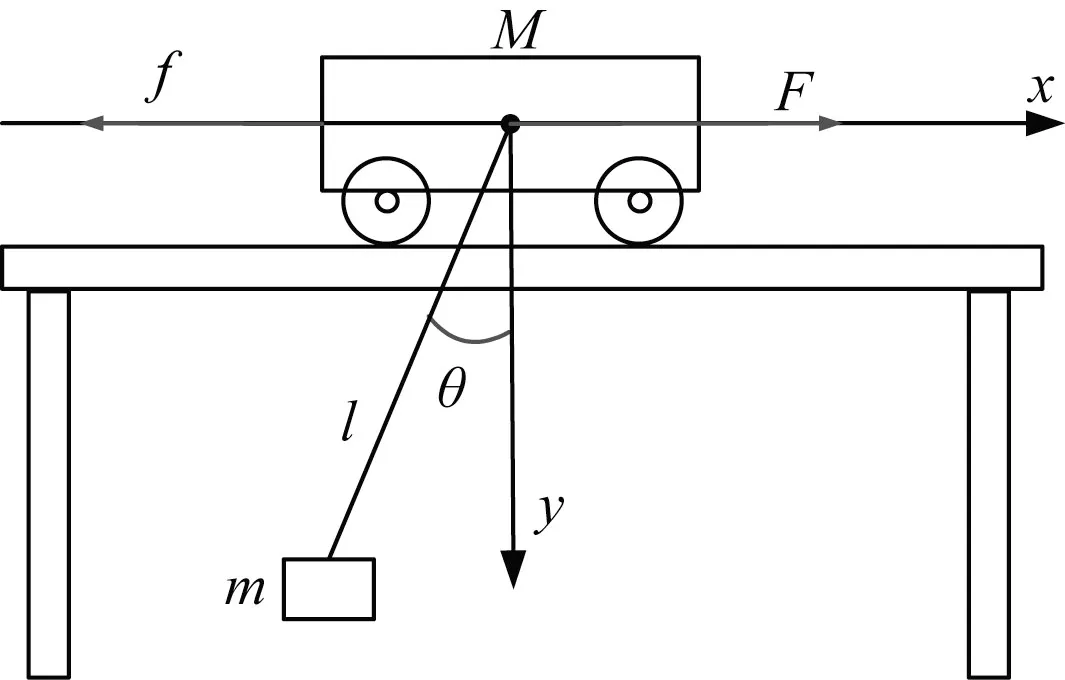
图1 桥式吊车动力学模型
其中M为台车质量,m为负载质量,l为吊绳长度,θ为摆动角度的大小,fr、ε、kr∈R+未知系统参数。在不失一般性前提下,做如下合理假设:(1)相对于吊物质量,吊绳的质量可以忽略不计;(2)吊绳的弹性形变忽略不计;(3)空气阻力忽略不计。
利用拉格朗日方程得到如下桥式吊车动力学模型:

在这里g 为重力加速度,f 为台车与轨道之间的摩檫力,采用如下模型进行描述[14]:

选择状态变量

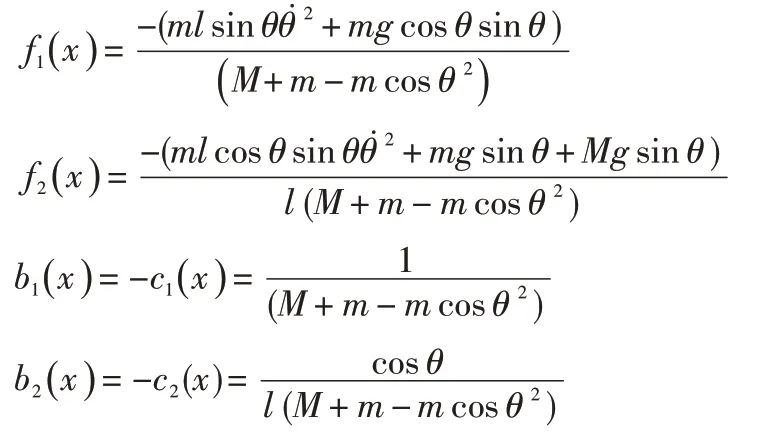
状态方程可进一步转化为

其中, fi,bi,ci定义具体如下:
2 模糊滑模控制器设计
2.1 滑模控制器
对于桥式吊车系统,控制目标是在充分抑制并消除整个过程中负载的摆动基础上使台车精确、快速地到达目标位置xd处。因此,本文采用了一种将模糊调节器与滑模控制相结合的桥式吊车控制方法。首先,根据桥式吊车系统物理本质,将状态变量分为两组,第一组(x1x3)、第二组(x2x4),再将第一组转化为(e1e2),其中e1=x-xd,e2=θ-θd。xd为台车到达的目标值,θd为摆角的目标值,定义中间变量z为e1,e2两种状态误差的线性组合,如式(5)所示,设置状态位置误差e1、摆角误差e2,定义中间变量z为e1,e2两种状态误差的线性组合:

这里,c为正数。进一步,将滑模控制的滑模面定义为:

在设计滑模控制律时,采用等效滑模控制的方法,因此,将组合滑模控制律定义为:

先不考虑摩擦力,取s˙=0 ,将(4)~(5)代入得:

为了保证滑模到达条件成立,设计切换控制如下:

2.2 模糊规则
根据系统方程式(4)可知,当干扰f 存在时,由式(9)可知,为保证系统运动在有限时间到达滑模面,增益k的值须足以消除外界干扰等不确定项的影响,才能确保滑模存在条件ss˙<0 。因此,如果干扰f是时刻变化的,为了削弱抖振的影响,k也应该时刻变化。基于上述思想,可以设计一维模糊控制器,其根据ss˙的大小来实时地调整k 的大小。定义模糊逻辑调节增益k为:

模糊控制器的输入变量为ss˙,输出变量为Δk,描述输入和输出变量的语言值的模糊子集为:

式中:PB 为正大;PM 为正中;ZO 为 0;NM 为负中;NB 为负大。
图2所示为模糊系统的输入、输出隶属函数。
设计的模糊规则如下:
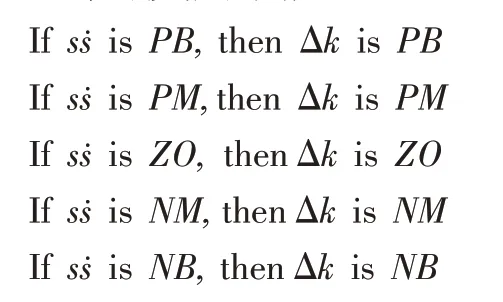

图2 ss˙和Δk的隶属度函数图
2.3 稳定性分析
定理:对于式(4) 所示的桥式吊车系统,按照(5)~(6)的方式通过引入中间变量定义滑模面。最后得到的控制量如(7)所示,如果控制器参数满足c>0,α>0,则各系统状态的稳定性可得到保证。
证明:对于滑模面s采用李雅普诺夫函数:

则其导数为:

式(12)表明,所提出的控制器的输入满足滑模条件ss˙<0,保证了在有限时间内各状态量都将到达切换面s=0。
3 仿真实验及分析
为了验证本文提出的滑模控制与模糊调节器相结合的有效性,在Matlab Simulink环境下进行仿真实验。图1中桥式吊车系统参数的值分别为M=7,m=3,l=0.8,fr=4.4,erx=0.01,krx=-0.5,重力加速度g 为9.8,x 的目标值xd=2,θ的目标值θd=0。
对于桥式吊车系统,分别采用普通滑模控制、模糊滑模控制对系统的防摆定位控制进行仿真及对比分析,所设置的控制系统参数为a=1.15,c=8,η=1.3,k0=7。模糊调节器的参数分别为输入调节因子为0.7,输出调节因子为10。相同条件下2种滑模控制防摆定位效果如图3所示。

图3 两种滑模控制防摆定位控制效果
由图3可看出,2种滑模控制方法都实现了台车精确、快速地到达目标位置xd处,即位移从0 m 到2 m。图3(a)~(b)表明,模糊滑模控制对抖振抑制的效果明显优于普通滑模控制,抖振振幅被大幅度限制,控制输出在20 s 左右趋于0,表明了所提出的方法在减弱抖振方面的有效性。图3(c)表明了基于模糊滑模控制器的台车位移响应速度快于普通滑模控制,大概6 s即可到达指定位置。图3(d)表明了普通滑模控制对抑制摆线角度效果较好,在振幅方面,两种方法控制摆角都在1.6°之内,然而在控制响应时间方面,普通滑模控制略优于模糊滑模控制,控制响应时间约为11 s。
采用模糊滑模控制算法,吊车负载质量m从3 kg变为0.7 kg,对桥式吊车系统进行控制仿真,仿真效果图如图4所示。
图4(a)表明负载质量减小时,抖振抑制效果略有加强。由图4(b)~(c)可看出,改变负载质量m,防摆控制效差异不大,这有效地说明了本文提出的新型模糊滑模控制方法良好的鲁棒性。
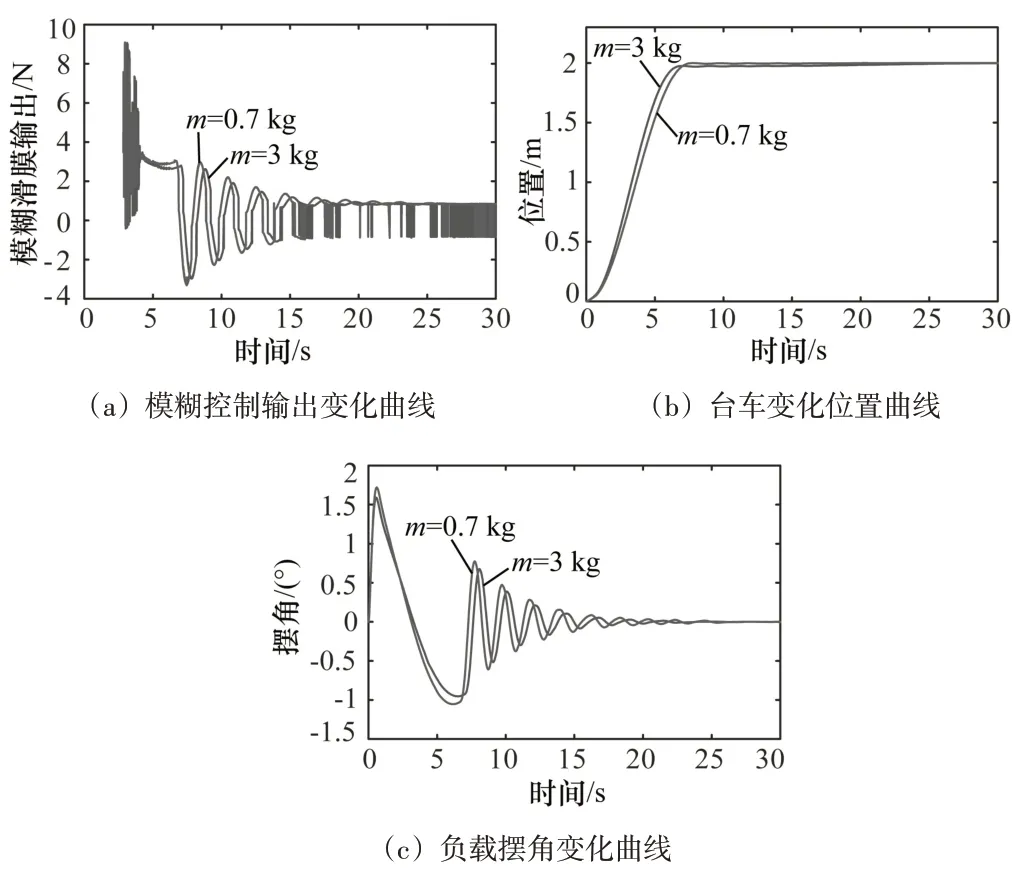
图4 不同负载质量防摆定位控制效果
4 结束语
本文提出了一种桥式吊车系统的滑模设计方法。通过设计一个模糊接口系统调节组合滑模控制器的增益,有效降低了切换增益,解决了普通滑模的抖振问题。同时这里采用了新的滑模面,通过研究桥式吊车系统的物理特性后,引入一个中间变量,即系统状态的一部分的线性组合,然后在中间变量的基础上,定义了滑动面,利用李雅普诺夫方法推导了滑动面控制律。仿真实验结果验证了理论分析的正确性和所设计的控制器的合理性。
