压电驱动器迟滞非线性的增强型Prandtl-Ishlinskii模型建模及实验验证*
2020-11-27曾俊海
钟 云,黄 楠,曾俊海
(广州大学机械与电气工程学院,广州 510006)
0 引言
随着精密制造装备运动速度和精度的提高,微纳米级别的精密工程也越来越引起人们的关注。微纳定位执行器是实现高精度微纳米级定位的驱动机构。以压电陶瓷驱动器为代表的智能材料驱动器以其具有无磨损、分辨率高、效率高、强度高、响应速度快等优良特性,被广泛应用于MEMS、高速原子力显微镜、超精密机床和微加工平台的定位系统中[1-2]。存在于压电陶瓷驱动系统中的迟滞往往会导致系统精度下降、振荡,甚至造成系统的不稳定[3-4]。例如,在开环情况下,迟滞会产生高达10%~15%的定位误差[5]。与传统非线性相比,迟滞表现出多值映射和记忆特性,使得其建模和控制变得异常困难。目前,以压电陶瓷为代表的智能材料特性的建模和补偿控制已成为微纳定位技术领域中的一个热点问题[6-7]。
迟滞建模主要有3类方法[8-9],一种是以Jiles Atherton模型为代表的物理建模方法,包括Duhem 模型、Bouc-Wen 模型等;另一种是以Preisach模型为代表的数学算子建模方法,包括 Prandtl-Ishlinskii 模 型 和 Krasnosel′ skii-Pokrovskii 模 型 等 ;还有一种是基于计算智能的智能建模方法。在物理建模方法中,模型通常采用微分方程来描述,模型结构复杂,参数较难确定。基于数学算子的迟滞模型采用基本数学算子,如relay 算子、play 算子、stop 算子等,进行线性叠加而成[9]。基于算子的迟滞模型虽脱离于迟滞特性的物理意义,但能够准确描述迟滞现象,也被称为基于现象的迟滞描述方法。基于算子的迟滞模型,由于求解其逆模型或者近似逆模型相对容易,特别是Prandtl-Ishlinskii 模型存在解析的逆模型,因此,被广泛应用于压电材料的迟滞建模。近年来,智能建模方法得到了国内外众多学者的关注[10]。这类模型利用神经网络、模糊树对非线性函数的通用逼近性来描述迟滞。神经网络、模糊树建模控制方法实现容易,但系统跟踪精度不够高。针对一些特定输入,也有学者提出不同的建模方法,例如GU等[11-12]针对正弦输入信号,提出采用椭圆来对迟滞进行描述,取得了不错的效果。
本文以基于dSpace 开发系统的压电微位移平台为对象,对改进的增强型Prandtl-Ishlinskii模型进行了验证。实验结果表明,本文提出的模型在低频段的描述精度与传统的Prandtl-Ishlinskii模型略有提高,但在高频段,则其建模精度要高很多。这些都验证了本文基于改进的增强型Prandtl-Ishlinski型(EPIM)迟滞建模方法的优越性。
1 基于增强型Prandtl-Ishlinskii 模型的磁滞非线性建模
Prandtl-Ishlinskii 模型是典型的唯象迟滞模型,是算子模型的一种,压电陶瓷存在复杂的磁滞非线性可以用Prandtl-Ishlinskii模型进行描述,如下式所示。
式中:b(ri)为待辨识的密度函数。ti<t<ti+1,0 ≤t≤N-1;∀r≥0。
传统P-I模型的对称性,极大降低了该模型描述迟滞非线性现象的精确性。在Prandtl-Ishlinskii 模型(亦被称为经典P-I模型)的基础上进行改进,得到了具有非对称性的增强型P-I模型。

式中:a1和a2为待辨识的增强系数;b(ri)为待辨识的密度函数;Fri[v](t)为play算子;ri为play算子的阈值,其具体定义见文献[13]。
2 基于dSpace开发系统的实验平台
2.1 硬件结构
如图1所示,压电微位移实验平台由4部分组成:带集成电容式位移传感器的压电定位平台、低压驱动放大器、dSpace开发系统和上位机。实验平台上使用的压电微位移定位平台被固定安装在气动隔振台上,以减少支撑结构的诱导振动。

图1 压电微位移实验平台
压电微位移实验平台的架构图如图2所示,集成电容式位移传感器将位移信号-30~130 nm转换成-0.3 ~1.3 V的模拟电压,再通过dSpace开发系统中的16位ADC转换成所需的数字信号。低压驱动放大器的输出电压范围为-30 ~130 V,控制输入电压范围为-2 ~12 V,放大倍数为10。dSpace开发系统主要用于输入信号的产生和控制算法的实现,以及位移传感器的信号采集。
2.2 软件结构
如图2 所示,dSpace 开发系统通过上位的ControlDesk 软件和Matlab/Simulink 环境来实现编程和在线测量,从而实现对压电微位移实验平台的控制。ControlDesk 为实验时使用的自动化软件,同时ControlDesk 的图形用户界面为压电微位移实验平台提供了实时的参数监控功能。GNU 编译器和Matlab生成由dSpace独立于Simulink运行的.sdf后缀可执行文件,从而构成了dSpace的快速控制原型实验环境。DAC和ADC转换器提供了位于dSpace与Simulink及压电驱动器之间的接口。运行于dSpace中的程序采用基于C语言的S-function来实现。上位机中的实时数据模块为ControlDesk提供数据接口,这样当dSpace执行实时程序时,ControlDesk可实时读取所需的测量数据。
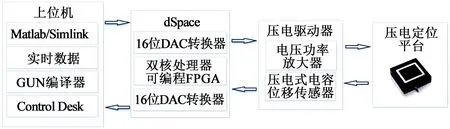
图2 压电微位移实验平台架构图
3 测试实验与结果
3.1 实验步骤
低压驱动放大器的输出电压范围为-30 ~130 V,控制输入电压范围为-2 ~12 V,放大倍数为10,因此本实验将输入到低压驱动放大器的电压在Matlab里面限制为-2~10 V。本实验采用放大器输出幅值为20 V的正弦波对压电微位移平台进行驱动。考虑到dSpace 开发系统的D/A 输出硬件接口设置时,进行了归一化处理,输出-1~+1对应D/A输出接口的-10~10 V,因此,对应到上位机Matlab 中的输入信号则为v( t )=0.2 sin ωt ,其中w为正弦信号的角频率。dSpace开发系统执行程序的采样频率设置为20 kHz。
设置好输入信号后,压电微位移平台的实际输出则通过dSpace 的A/D 转换器读入到上位机中。为了方便处理,本文将数据统一转换为压电微位移平台的实际输入和实际输出,即压电微位移平台的输入为压电驱动器的输出电压,输出则为位移传感器的输出。
为了验证模型的有效性,本文在辨识得到增强型迟滞模型(EPIM)的基础上,还将与经典的Prandtl-Ishlinskii迟滞模型(PIM)进行对比。实验的具体步骤如下:首先,在不同频率的正弦输入信号下,利用ControlDesk 软件实时采集压电定位平台的位移传感器输出信号;然后,根据测得的输入输出实验数据,分别对本文提出的PIM迟滞模型和EPIM迟滞模型进行参数辨识;最后,得到不同输入信号下压电迟滞模型,并对数据进行分析。需要说明的是,为了对比方便,在所有模型参数辨识时,本文均采用的是Matlab中的fmincon函数来完成。
3.2 实验结果
本实验针对15 Hz、50 Hz、100 Hz和150 Hz等4个不同频率的输入正弦信号的压电迟滞特性进行建模和迟滞模型参数辨识。输入频率为50 Hz时EPIM模型辨识参数如表1所示。
本实验中,对于PIM迟滞模型和EPIM迟滞模型的算子个数均取 20,即 m=n=20[13]。分别对 15 Hz、50 Hz、100 Hz 和150 Hz等4个不同频率的正弦输入信号下的迟滞模型参数进行辨识。图3~4给出了输入为50 Hz正弦信号下的2种模型辨识结果,其他3种频率下也有类似的结果,不一一给出。图中,横坐标为归一化后的输入信号,纵坐标为输出位移信号,单位为μm 。从图中可以明显看出,2 种迟滞模型都能描述压电陶瓷驱动器的迟滞特性。至于模型描述的准确性,本文采用均方根误差来进行描述和对比。表2 所示为20 kHz 采样频率下1.5 s 采用时间内不同输入信号下2 种模型对应的均方根误差;表3 所示为相应的精度提高百分比。由表2~3 可以总结出,在低频段,PI迟滞模型、EPI迟滞模型的均方根误差相差不大,随着输入信号频率的增大,EPI迟滞模型的优势越来越明显。在输入信号频率为50 Hz 时,EPIM 比PIM 的RMSE精度提高13.47%;当输入信号频率为150 Hz时,EPI模型比PI 模型的RMSE 精度提高27.09%。由此,证明EPI 模型对描述迟滞特性比传统的PI模型具有较大的优势。
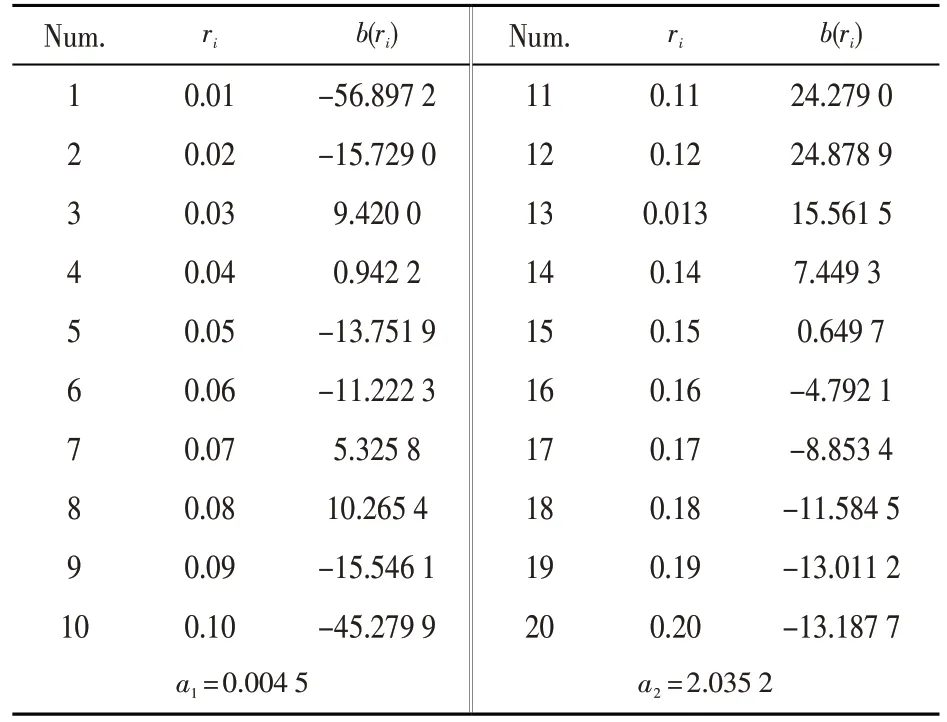
表1 输入频率为50 Hz时EPIM模型参数辨识结果
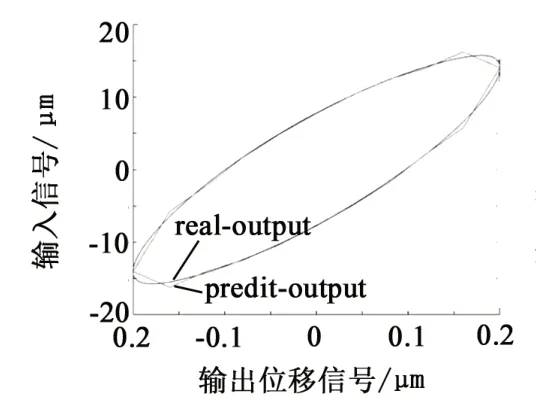
图3 输入频率为50 Hz 时PIM模型实验结果
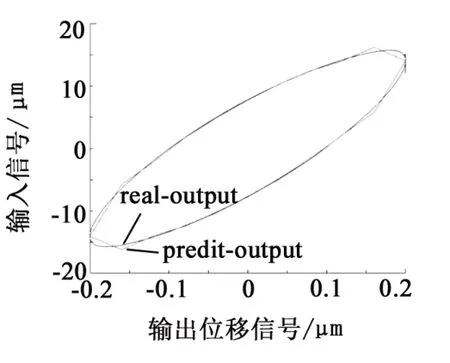
图4 输入频率为50 Hz 时EPIM模型实验结果
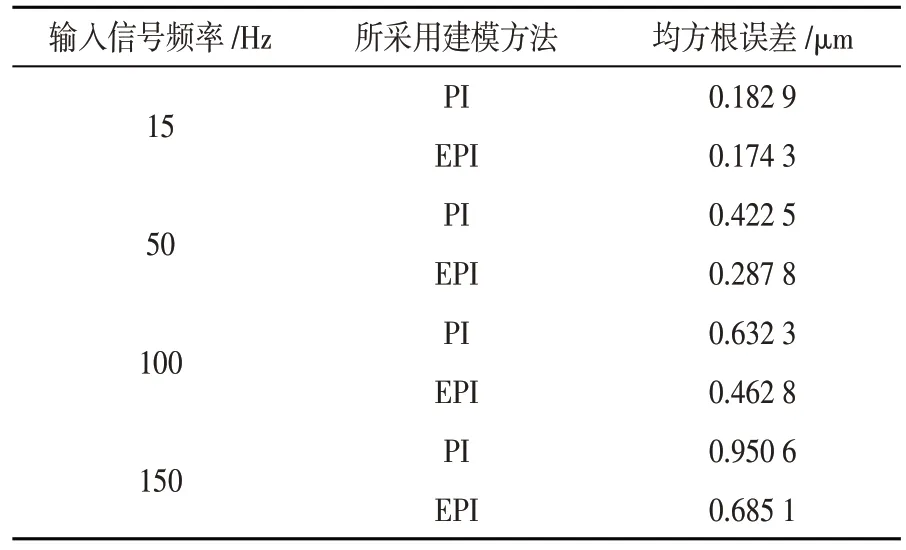
表2 EPIM建模方法与PIM比较结果
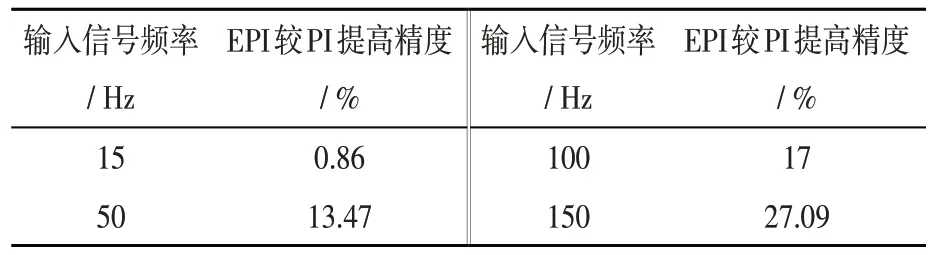
表3 EPI模型建模方法与PI模型相比提高的精度
4 结束语
本文针对周期性的正弦输入信号,采用增强型迟滞模型(EPIM)来对压电陶瓷的迟滞特性进行描述。在分析了压电迟滞特性和经典的Prandtl-Ishlinskii 迟滞模型特性的基础上,给出了压电陶瓷迟滞特性的增强型迟滞模型(EPIM)。然后,搭建了基于dSpace 的硬件在环测试平台用于模型的验证。最后,对比传统的PI 模型和改进的增强EPI 模型,给出了模型的实验验证结果。实验结果表明,针对4种不同频率的正弦输入信号,EPI模型比PI模型优势更好,低频段描述精度略有提高,高频段则增强型迟滞模型(EPIM)描述精度要高很多。
