多传感器移动机器人U 型区域循迹避障技术研究
2020-11-27雷道仲
雷道仲 蔡 琼
(湖南信息职业技术学院,湖南 长沙410200)
移动机器人的避障问题一直是大家关注的热点问题之一,不少专家学者通过自己潜心的研究,得出了一些关于移动机器人的避障策略或算法;形成了相应的研究成果,为移动机器人的发展与应用起到极大的推动作用。然而,在现实生活中,很多特殊功能的机器人需要进入狭窄不规则的区域进行作业,如U型、L 型区域等,进入这些特殊的区域,如果避障策略不当,往往机器人会被“卡死”,需要人为干预才能驶离该区域。针对这一现象,笔者将基于以上理论研究成果的基础上,对移动机器人进入U 型区域的避障策略展开研究,设计出了U 型区域移动机器人循迹避障策略的硬件平台和避障策略控制软件,算法和硬件设计方案。为进入U 型区域的移动机器人的避障提供科学的设计方案和应对策略。
1 系统硬件设计
1.1 系统组成
针对U 型区域的特殊性,本系统采用多传感器协同循迹避障,系统硬件电路的设计方案如图1 所示,整个系统由超声波传感器、红外光电传感器、循迹QTI 传感器、电源、电机控制系统等几部分构成。
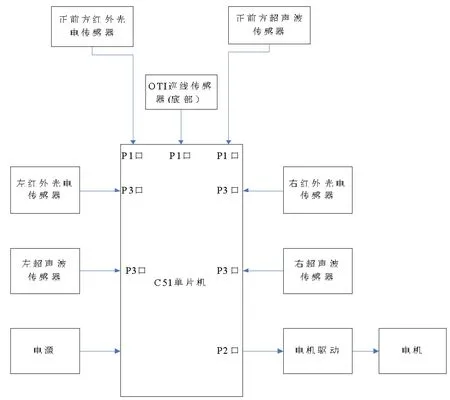
图1 系统硬件电路构成框图
1.2 红外线收发对管
红外线发射器:红外线发射管在LED 封装行业中主要有三个常用的波段,如下850NM、875NM、940NM。根据波长的特性运用的产品也有很大的差异,850NM波长的主要用于红外线监控设备,875NM 主要用于医疗设备,940NM 波段的主要用于红外线控制设备。如:红外线遥控器、光电开关、光电计数设备等。
红外线对管应用:本文中,移动机器人的寻迹功能采用红外线收、发对管和QTI 循迹共同实现,QTI 巡线传感器用于对固定路线巡线工作,而红外线收、发对管则用于自主巡线功能,具体工作过程如下:两对红外线收、发对管安装在多传感器移动机器人底盘正前方,红外发射管一直发射信号,接收管时刻准备接收信号。两对对着前方的红外管发射红外信号,当前方无遮挡物时,就无信号返回,C51 单片机检测到无信号,移动机器人就会视为前方无障碍,会继续前进;当红外发射管发射的红外线遇到前方的遮挡物时,信号会被反射回来被接收管所接收,C51 单片机会根据接收管反馈回来的信号做出相应的处理,如:后退、左转弯或右转弯等,要视两个接收对管反馈的具体情况而进行相应的动作。
1.3 工作原理
移动机器人U 型区域的循迹避障是由几种传感器协同作用共同完成。具体过程如下:机器人开启电源,如果机器人底盘下的QTI 巡线传感器全部返回给单片机的是低电平,则说明移动机器人不是沿着固定的黑色路线循迹,而是需要采用红外光电管自主循迹避障,此时,系统会将机器人底部寻迹传感器关闭掉,同时启动红外光电传感器,前面、左右两侧同时启用,当移动机器人进入如图1.2 所示的A 区域时,机器人畅通,左右、前面光电管传感器返回给单片机的均是低电平,机器人可以继续向前行走。当进入B 区域时,前面与左边红外光电传感器都检测到高电平时,说明机器人已经到达U 型区域狭窄的端口位置,这时就需要启动前面、左边超声波传感器了,超声波传感器通过超声波测量左边墙壁与机器人的左边的距离,超声波测距原理如下,超声波启动时,单片机定时器启动计数,当超声波遇到障碍物时返回来,单片机将定时器的时间数据除以2,便是单程超声波传播的时间,然后乘上超声波在空气中传播的速度,即便得到避障距离。拿测量到的距离与机器人需要调头的距离进行比较,再决定移动机器人是否还要后退到可以进行调头的位置,如此反复,便完成U 型区域避障与循迹的功能,移动机器人才不会“卡死”在U 型区域。式(1)是超声波测距公式,因超声波在常温下的空气介质中传播的速度大约为344m/s。

其中:S 为测量距离,Time
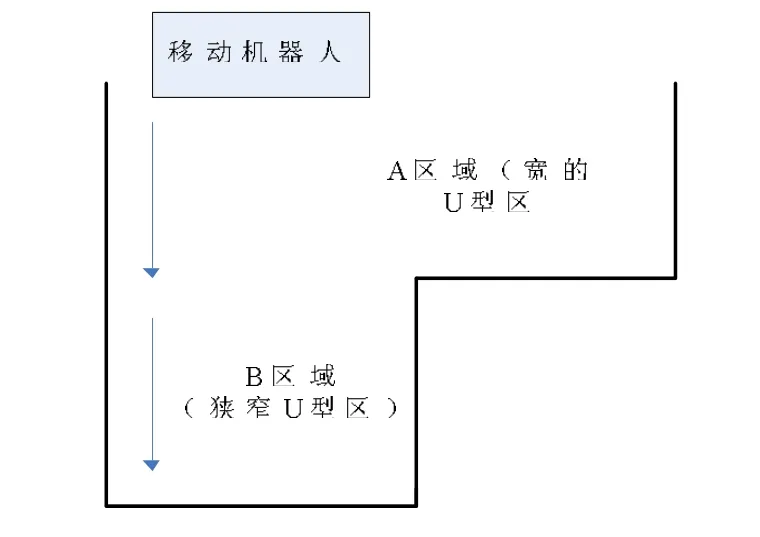
图2 移动机器人驶入U 型区域示意图
2 系统软件设计
2.1 流程图
根据上述硬件系统,设计出了如图3 所示的移动机器人U型区域循迹避障系统主程序系统框图。
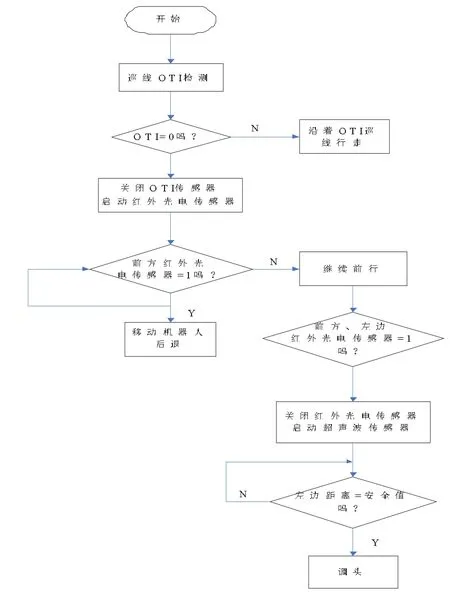
图3 主程序流程图
2.2 超声波测距控制
超声波是一种远高于人的听觉范围的声波,它具有频率高、在空气中传播快等特点。超声波传感器正是利用超声波的这种特性研制而成的传感器, 它通过传送一个超声波以及超声波碰撞到前方物体发出爆裂回声后返回到传感器所需时间的输出脉冲来计算距离的(测距的)。如图4 所示为超声波传感器工作时序图,首先,在C51 单片机发送的10us 触发脉冲的控制下,超声波传感器循环发出8 个40 kHz 的(超声波)爆裂声,此爆裂声在空气中以约1130 英尺每秒的速度传播,当碰到物体时便反射回到传感器,此时传感器会产生一个回响输出脉冲,向C51单片机表示回波被探测,这个脉冲宽度就是对应于爆裂回声返回到传感器所需时间,这个回响电平的输出与检测距离成正比。本文应用HC-SR04 位差超声波距离传感器作为移动机器人运动的双眼(测距范围是:2CM-450CM),C51 单片机作为移动机器人的大脑,随时判断和监控前方障碍物的距离。
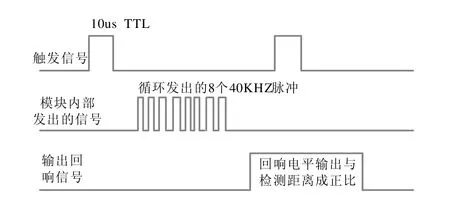
图4 超声波传感器工作时序图
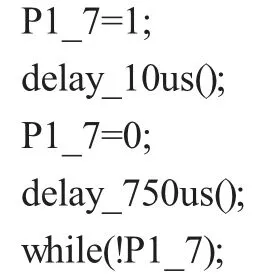
2.3 超声波启动时序控制代码:
3 结论
根据实际测试结果,移动机器人在红外、超声波传感器的协同作用下,能够在U 型区域很快完成避障、调头的功能。这一结果的实现,为移动机器人在其它特殊区域的循迹与避障工作提供思路。
