一种基于超声波的泊车辅助系统的设计与实现
2020-11-27潘梦鹞郇锐铁吕小勇
王 锋, 潘梦鹞, 郇锐铁, 吕小勇
(广东工贸职业技术学院, 广东 广州 510510)
随着人民生活水平的提高,汽车日益增多,泊车逐渐成为了人们关注的一个重要问题。泊车入库时,汽车自带的雷达在车体后退且靠近后方障碍物时,会发出声音报警,这对泊车入库有一定的辅助作用;此外,部分高级轿车带有倒车后视影像,这也有助于泊车入库。但在泊车入库过程中,若一次倒车入库不成功而需前行调整时,当车体接近车前障碍物,雷达压根不报警,倒车影像亦无提示,此时只能凭目测或感觉前行挪动。此外,泊车入库过程中,无论雷达或倒车影像是否有报警或提示,但均无法给出车体与前后障碍物之间的实际距离,无法确认车头或车尾还有多少挤压空间,只能凭感觉进行挪动,这对于新手驾驶员泊车入库或在狭小的空间侧方停车时犹为不便,尤其是在狭小的道路进行侧方停车时,在其它行驶车辆的催促下,稍不留神就可能刮蹭到前后车或别的障碍物,进而造成财产损失或引起纠纷。本文设计的超声波泊车辅助系统可有效解决这一问题。
与传统的超声测距相比,本设计结合可视化的测量技术,采用由6组超声波传感器组成探测网络,对车体与前后障碍物之间的距离进行全面测量,测量值送入12864液晶屏实时显示,并根据6组超声波传感器测量所得的数据,给出报警文字提示及不同频率的声音报警信号。超声波泊车辅助系统使用简单,直观便捷,显示内容清晰,方便在汽车运动过程中对数据进行观测,是辅助泊车的得力工具。
1 超声波测距原理
目前,障碍物探测很多采用超声波传感器。超声波测距可以直接测量近距离目标,纵向分辨率高、适用范围广、方向性强,并具备不受光线、烟雾、电磁干扰等因素影响,覆盖面较大等优点。目前,超声波测距已广泛应用于液位测量、避障、测距及检测等领域,应用前景广阔[1-5]。
超声波测距的工作原理:发射器向外发射超声波,超声波在介质中传播,遇到障碍物后反射,产生回波,接收器接收回波[6]。通过检测发射超声波与接收回波之间的时间差t,求出目标障碍物距信号发射源的距离d,计算公式为:

式中:v——超声波波速,m/s;t——发射超声波与接收回波之间的时间差,s;T——环境温度,℃;S——海水盐度,按千分比计算;P——海水静压力,Pa。
2 超声测距模块及其工作原理
本设计采用的超声波测距模块,其原理图如图1所示,图2为其超声波时序图。
当超声波测距模块的Trig端 (图1的J1-3脚) 收到一个10us以上的脉冲触发信号时,该模块内部将发出8个40kHz脉冲信号,并从Echo端 (图1的J1-2脚) 输出回响信号。当模块检测到回波信号则停止输出回响信号,如图2所示,回响信号的脉冲宽度与所测的距离成正比。通过计算发射信号到收到回响信号的时间就可以根据公式 (1) 计算得到发射器与障碍物之间的距离d。为避免发射信号对回响信号的干扰,建议测量周期为60ms以上。

图1 HC-SR04超声波测距模块原理图

图2 超声波时序图
3 超声波泊车辅助系统的设计与实现
3.1 系统硬件设计
本文设计的超声波泊车辅助系统由主控单元、超声波探测网络、温度传感器、液晶显示模块、报警模块等构成,其结构框图如图3所示。主控单元采用微芯 (Microchip) 公司的PIC16F877A,主要用于距离信号采集、温度信号采集及数据修正、液晶显示控制、声音报警控制等。温度传感器采用DALLAS公司的DS18B20单总线数字式温度模块,温度信号用于修正超声波传感器检测的距离值,以提高检测精度。显示模块采用12864液晶,报警模块采用带驱动电路的蜂鸣器模块。超声波探测网络由6个HC-SR04模块组成,车头和车尾各安装3个,其安装示意图如图4 所示,其中前中与后中安装于正前、正后方向,前左与前右及后左与后右均与车体成45° 角,用于检测前左、前中、前右、后左、后中、后右6个位置与障碍物之间的距离。
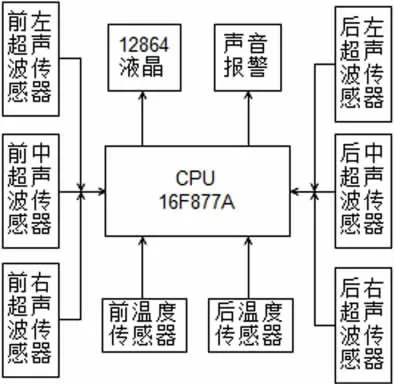
图3 超声波泊车辅助系统结构框图
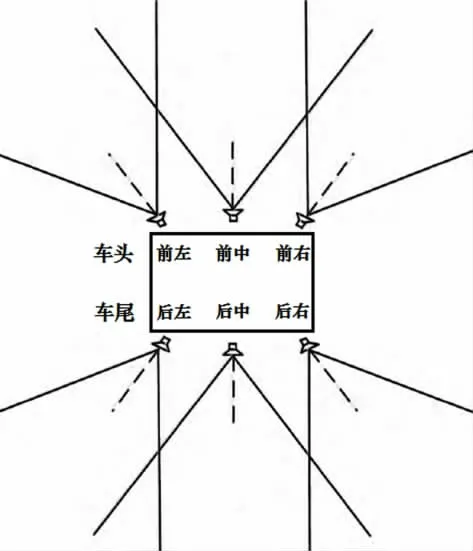
图4 超声波探测网络安装示意图
3.2 系统软件设计
系统软件采用模块化设计,主要包括:超声波探测网络距离测算程序、温度测算程序、数据处理程序、显示程序、报警程序、中断服务程序等。图5为主程序流程图,系统轮流发出6组触发脉冲,每组触发脉冲输出后进行回波检测,用于获取超声波在车前及车尾6个方向的传输时间,回波时间与检测距离成正比,检测距离经温度修正后发送至12864液晶显示,当距离过小时,给出报警文字提示及不同频率的声音报警信号,距离越小,报警声音频率越高。

图5 超声波泊车辅助系统程序流程图
3.3 系统的硬件实现
根据系统硬件结构框图搭建硬件模型,按系统程序流程图编写控制程序,对系统功能进行测试。图6、图7分别为超声波传感模块车前车后测点安装图,由6个超声波传感模块组成一个超声波探测网络。前中与后中传感模块安装于车辆正前、正后方向,前左与前右及后左与后右传感模块均与车体成45°角,分别用于检测前左、前中、前右、后左、后中、后右6个位置与障碍物之间的距离。图8为控制及报警、显示模块,在距离较小时,能及时发出文字及声音报警,降低车辆碰撞事故概率。

图6 车前测点安装图

图7 车后测点安装图
4 测量结果分析
图9为倒车过程中车尾障碍物的一组测试数据,其中后左为25cm, 后 中 为20cm,后右为25cm,前左为400cm,前中为195cm, 前 右 为400cm。对于车尾传感器数据,因后左与后右传感模块与车体成45°角,故后左与后右测量值稍大于后中测量值,车辆直线倒车时应以后中数据为准。对于车前传感器数据,前中测量值为195cm,表明车辆与正前方障碍物距离为195cm,因前左与前右传感模块与车体成45°角,前左与前右传感模块未检测到障碍物,故前左、前右显示最大测量值400cm。

图8 控制及报警、 显示模块

图9 系统倒车测试数据
表1数据为系统测量距离与实际距离的测量记录,系统测量数据只保留整数部分。经多次测试,并与实际距离值对比,系统测量误差约1cm,满足使用要求。

表1 测量数据记录cm
5 结语
超声波测距具有精度较高、成本低、抗干扰强等优点。本文利用由6组超声波模块组成的超声波探测网络对泊车过程中的车前、车后障碍物距离进行全面测量,在距离过小时给出文字及声音报警提示,可以有效降低泊车过程中的碰撞事故,缩短泊车时间。经多次测试,系统误差在1cm以内,满足使用要求。在此基础上,可以进一步优化超声波探测算法,提高测量精度,提高系统的可靠性及实用性。