传感器布置优化方法研究
2020-11-25刁望成宋宇博
刁望成,宋宇博
(兰州交通大学 机电技术研究所,兰州 730070)
自动驾驶是智能汽车(intelligent vehicle,IV)邻域的重要分支,其通过环境感知、定位导航、动态规划与决策、自动控制等技术的综合应用实现了车辆的自动驾驶.环境感知技术作为自动驾驶车辆的关键技术之一,逐渐成为科研人员关注的热点.环境感知技术主要是通过视觉、激光雷达、毫米波雷达等传感技术对汽车周围的车辆、行人、障碍物以及自身的状态进行检测,对汽车行驶所在的道路、信号灯、交通标识进行识别.环境感知信息的全面性、准确性是自动驾驶决策安全性和稳定性的重要保障[1].
随着自动驾驶车辆智能化要求的不断提高,车辆感知系统需获取精度更高、覆盖面更广的环境信息以满足行驶需求.为实现上述目的,可以通过安装数量更多、精度更高的传感器来实现,但造成了硬件成本过高,限制了自动驾驶技术的推广.通过优化既有传感器的安装位置和安装角度,最大化传感器获得的信息,既可以节省制造成本,又能有效提高感知性能,是满足自动驾驶车辆智能化需求的另一重要途径,具有重要的研究意义[2].
在自动驾驶技术日益发展的过程中,如何有效发挥传感器的感知性能逐渐受到越来越多学者的广泛关注.文献[3-4]提出了一个通用的覆盖模型框架,该框架已经被验证并成功地应用于摄像机激光系统中传感器的布置.文献[5]进一步将该覆盖模型用于多摄像机部署,构造了一个摄像机重叠图,并设计了贪婪算法以获得更好的优化解.文献[6]以解决无线传感器网络的漏洞检测与修复问题为目标,提出了一个轻量级的漏洞检测与修复的分布式算法,实现了传感器的布置优化.除了针对视觉传感器布置优化问题的研究外,激光雷达的布置优化问题也产生了较多成果.文献[7]提出了一种通用的激光雷达感知模型,根据激光雷达物理特性将其感知空间划分为多个有限三维子空间,以最大化感知子空间为优化目标,求得激光雷达的最佳布置,实现了激光雷达感知性能的有效挖掘.在此基础上,文献[8]进行了算法改进,将传感器感知子空间投影到二维平面,并使用智能算法对问题进行求解,进而获取传感器最佳布置.该研究成果初步解决了激光雷达布置优化问题,但中间求解过程过于繁琐,误差累计过大.针对上述问题,文献[9]提出激光雷达三维感知模型,有效降低了问题的求解复杂度.该模型在视觉传感器布置[10]和无线传感网络覆盖[11]中得到了广泛应用.
上述研究成果只对单一类型传感器的布置优化问题进行了探讨,关于多类型传感器布置优化问题的研究成果相对较少.本文在综合考虑多种传感器布置优化准则基础上建立了多类型传感器布置优化问题的评价指标,创新性地提出了多类型传感器布置优化问题的一般性解决方法.该方法针对如何量化度量多类型传感器的综合感知效果,如何抽象传感器感知性能进行归一化建模,如何判定传感器感知区域与感知对象表面耦合关系,如何计算耦合区域的曲面面积,如何构建传感器布置优化模型及求解进行了一体化研究.
1 传感器布置优化模型
1.1 感知对象建模
行人、车辆以及路障是最为常见的感知对象,其外形结构具有复杂多样的特性.为描述感知对象表面特征,本文基于感知对象点云数据,以面元素为基础,以三角形网格为基本单元,采用不规则三角网(triangulated irregular network,简写为TIN)对感知对象进行建模,其模型为
(1)
式中:k表示TIN中三角形的索引(k=1,2,…,T),T表示TIN中三角形总数;R为TIN的拓扑关系;v为TIN中顶点元素集合;e为TIN中边元素集合;t为TIN中三角形元素集合;Ak表示索引值为k的三角形,其面积大小为
(2)
TIN中每个三角形均由距离最近的三个顶点组成,该准则表示为
tgjk={(vg,vj,vk)|d=(degj+degk+dejk),dehj+degh+dejg>d,degk+dekh+dehg>d,dejk+dekh+dehj>d,∀vg,vj,vk,vh∈v}.
(3)
TIN中顶点和三角形关系表示为:
(4)
式中:Xmn={0,1},当Xmn=1时表示第m个三角形和第n个三角形相连,否则Xmn=1;Ygj={0,1},当Ygj=1时表示第i个顶点和第j个顶点相连,否则Ygj=0;V为TIN中顶点总数.一般情况下,每个三角形周围有3个三角形相连,每个顶点与6个顶点相连.应用TIN对感知对象建模,其实体模型图、离散化模型图和三角网拓扑关系如图1所示.
为了计算感知对象TIN模型的覆盖面积,以三角形中心点Pk表示对应的三角形,通过判断Pk是否被覆盖来确定对应的三角形是否被覆盖,将TIN模型覆盖面积计算问题转化为三角形中心点的覆盖判定和面积累加计算问题.
1.2 传感器建模
本文研究的自动驾驶感知系统配置视觉传感器、激光雷达和毫米波雷达三种类型传感器,不同类型的传感器具有不同的感知特性和感知范围.本文关于传感器性能的研究仅限于感知区域,使用感知距离、水平视场角和垂直视场角三个参数描述不同类型传感器的感知区域.不同类型传感器的感知区域可采用如下指数衰减模型进行归一化建模[9]:
Cs(qs,Pk)=e-μ×J,
(5)
其中:μ≥0表示传感器的衰减率;s表示传感器索引(s=1,2,…,N),N表示传感器总的数量;J表示感知对象Pk是否在传感器感知区域内;qs表示传感器模型外部参数.本文在文献[4]基础上,通过如下二元组构建不同类型传感器的归一化感知区域模型,表示为
Gs=(qs,D)=(H,λ,D)=(x,y,z,η,γ,ds,2α,2β),
(6)
式中:H表示传感器安装位置的三维坐标;λ表示传感器安装角度,包括垂直安装角度η和水平安装角度γ;D表示传感器模型内部参数,包括水平视场角2α、垂直视场角2β和感知距离ds.传感器归一化模型如图2所示.
1.3 传感器覆盖面积计算

感知对象Pk(三角形中心点)被传感器感知区域覆盖需同时满足如下三个条件:
1) 感知对象Pk在传感器感知视场角范围内;
2) 感知对象Pk在传感器感知距离范围内;
3) 感知对象Pk在传感器感知范围内是可视化的.
具体判定步骤如下:
步骤1:Pk是否在传感器感知视场角范围内的判定条件为
(7)
式中:α表示传感器视场角;θp为Pk与传感器安装位置连线构成的向量与传感器感知区域法向量之间的夹角(见图4),θp大小为
(8)
当L1≤1时,Pk在传感器感知视场角范围内,否则Pk不在传感器感知视场角范围内.
上述判定过程需将Pk在全局坐标系下的坐标转化到传感器所在的局部坐标系下,并将Pk沿着全局坐标系下x,z轴旋转η,γ角度,转换公式为
(9)
步骤2:判断Pk是否在传感器感知距离范围内的判定条件为:
(10)
(11)
为了建模方便引入中间变量J,表示为
J=max{|L1|,|L2|,|L3|}.
(12)
当J≤1时,判定条件1)、2)同时满足,感知对象Pk在传感器感知区域内,否则Pk不在传感器感知区域内.将变量J简化为二元模型,则感知对象Pk是否被传感器Is(外部参数为qs)感知的判定条件表示为:
(13)
1.4 传感器布置优化模型
在感知对象离散化模型和传感器感知区域归一化模型基础上,以多个传感器的感知区域覆盖面积之和为目标函数,传感器的安装位置和安装角度为决策变量,建立的传感器布置优化模型如下:
(14)
s.t.J≤1;
(15)
(16)
(17)
(18)
模型中,式(14)为目标函数,其中Is(qs,Pk)={0,1},当Is(qs,Pk)=1时表示传感器s覆盖感知对象Pk,目标函数值越大,表示传感器布置方案越好.式(15)表示离散单元被感知.式(16)表示全局坐标系下激光雷达安装在车顶,且其感知范围为车辆前方和下方区域.式(17)表示毫米波雷达安装在车辆前方,且其感知范围为车辆前方区域.式(18)表示视觉传感器安装在车辆前方两侧,且其感知范围为车辆正前方区域.
1.5 模型求解
传感器布置优化模型的求解需要确定每个传感器的安装位置和安装角度,其中安装位置包括三个决策分量,安装角度包括两个决策分量,该问题是典型的多决策变量集成优化问题,直接求解难度较大.根据传感器布置优化模型的求解特性,本文引入粒子群算法,针对模型中安装位置和安装角度的约束条件构建搜索领域,根据传感器布置方案的量化评价指标设计粒子适应度函数和种群进化策略,算法结合粒子之间的协作和信息共享实施并行搜索[12].
算法中粒子的维度为5N,N为传感器数量,5为传感器的外部参数{x,y,z,η,γ}的数量.粒子集合表示为x={x1,x2,…,xM}.第i个粒子中第s个传感器的外部参数表示为xis={x,y,z,η,γ},s=1,2,…,N,i为粒子索引,s为传感器索引.每个传感器覆盖面积为As,则适应度值为
p=A1+A2+A3+…+As.
(19)
算法的具体步骤如下:
1) 粒子数量为M,在传感器外部参数可行解搜索领域范围Ω内初始化粒子的外部参数和粒子速度.
2) 计算每个粒子对应的覆盖面积,选择覆盖面积最大的粒子对应的传感器外部参数作为当前最优解,并记录每个传感器覆盖面积的当前最大值.
3) 由公式(20)~(21)更新粒子速度和外部参数,迭代产生每个粒子新的传感器外部参数.
vi+1=wvi+c1r1(pi-xi)+c2r2(pg-xi),
(20)
xi+1=xi+vi+1.
(21)
4) 根据新产生的传感器外部参数分别计算每个传感器感知区域的覆盖面积,并与每个传感器感知区域覆盖面积的当前最大值比较,大于相应当前最大覆盖面积,则更新相应传感器的外部参数.
5) 是否满足循环终止条件,如果不满足则执行3),否则输出最大粒子覆盖面积和相应每个传感器的外部参数.
具体流程如图6所示,算法参数设置如表1所列.
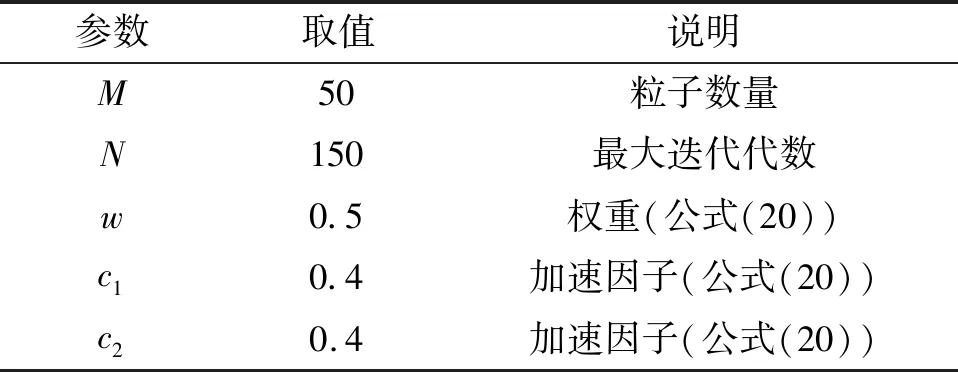
表1 算法参数设置Tab.1 Algorithm parameter setting
2 仿真实验与分析
为了验证传感器布置优化方法的有效性,在长50 m,宽10 m的仿真环境中进行仿真实验.实验中配置4台传感器,其中激光雷达1台,毫米波雷达1台,视觉传感器2台.假定传感器的水平视场角和垂直视场角相同,具体传感器仿真参数如表2所列.

表2 传感器基本参数Tab.2 Basic parameters of sensor
2.1 仿真实验
为验证本文提出优化方法的有效性,选取一辆轿车和一个行人作为感知对象,放置于车辆前方30 m处,应用本文设计的优化方法对传感器布置方案进行优化,传感器感知区域的覆盖面积之和与迭代代数之间的关系如图7所示,每个传感器的决策变量分量的搜索结果与迭代代数之间的关系如图8所示.
图7中传感器感知区域的覆盖面积之和随着迭代代数的增加不断增加,最后算法收敛达到最大值.图7中每次覆盖面积之和的增加都与图8中至少一个传感器的决策分量变化相关.图8中所有传感器的决策分量都收敛后,图7中传感器感知区域覆盖面积之和收敛,算法得到最大覆盖面积,同时得到每个传感器的安装位置和安装角度.由图7~8可知,传感器的安装位置和安装角度与传感器感知区域覆盖面积之和相关,通过调整传感器的安装位置和安装角度可以有效增加传感器感知区域覆盖面积之和.
在上述结论的基础之上,通过对比传感器厂家指导布置方案和优化的布置方案下的传感器感知区域覆盖面积之和,验证本文优化方法的有效性,仿真实验结果如表3所列.
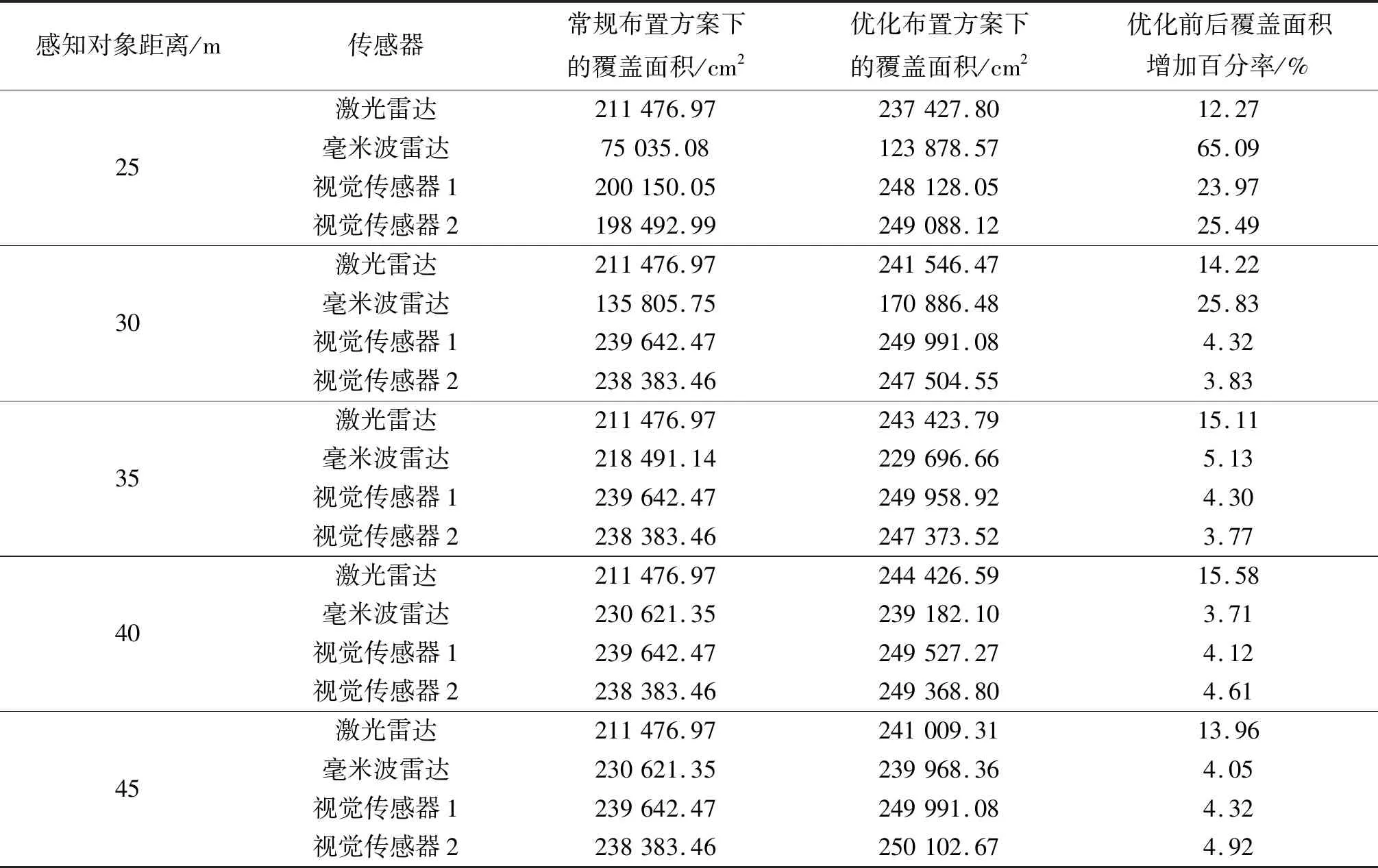
表3 优化结果与厂家指导布置结果对比Tab.3 Comparison of optimization results with manufacturer's placement results
仿真实验分别将感知对象放置在25 m、30 m、35 m、40 m、45 m处,对比了激光雷达、毫米波雷达、视觉传感器三种类型的四个传感器在厂家指导布置方案与优化布置方案下的传感器覆盖面积之和,由表3数据可以看出,在不同距离下,优化后的传感器布置方案对应的覆盖面积之和均高于厂家指导布置方案下的覆盖面积之和,平均增加了12.93%.本文提出的优化方法可以通过优化传感器安装位置和安装角度有效提高传感器感知区域覆盖面积之和.
2.2 传感器覆盖面积影响因素分析
为了进一步分析传感器的外部参数对传感器总覆盖面积的影响权重,以毫米波雷达为例,定性分析每个参数对传感器感知区域覆盖面积影响程度.实验场景和实验参数设置同2.1节,毫米波雷达在确定的安装位置(-2,0,76)和安装角度(1.580,1.586)下,分别独立变化一个决策分量,保持其它四个决策分量不变,得到的仿真数据如表4所列.
由表4可以看出,安装角度的最大覆盖面积和最小覆盖面积之差分别为5 686.93 cm2(水平安装角度)和7 386.30 cm2(垂直安装角度),而安装位置的最大和最小覆盖面积之差分别为4 630.65 cm2(X坐标)和1 395.70 cm2(Z坐标).表4中连续变化的Z坐标甚至出现了覆盖面积不变的情况.由此可见,传感器的安装角度是相对重要的影响因素.

表4 毫米波雷达仿真结果Tab.4 Radar simulation results
2.3 变距离下的传感器布置分析
2.1节和2.2节仿真实验均是假定感知对象在确定不变的位置下展开的研究,但自动驾驶车辆行驶过程中与感知对象的距离是动态变化的,不同感知距离下传感器布置方案是否一致是本文提出的优化方法能否应用的关键.为验证本文优化方法在不同距离下的一致性,仿真实验从10 m递增到60 m选取51个点,其它仿真设置同2.1节,不同距离下传感器布置方案分量的变化如图9所示.
由图9可以看出,在18 m到60 m的变化范围内,各传感器的安装位置和安装角度决策分量的收敛值具有较好的一致性,在上述距离范围内,静态环境下的优化结果可以适应动态变化环境,能够始终保证传感器感知区域覆盖面积之和最大.当距离小于18 m时,各传感器的安装位置决策分量和安装角度决策分量的收敛值开始发散.这是由于过短的感知距离无法实现传感器感知区域对感知对象的全覆盖,在局部覆盖感知对象情况下,每个传感器有多个位置可以使覆盖面积达到最大值,同时决策分量选值的随机性产生了感知距离小于18 m之后决策分量的离散性,在图9中表现为传感器的决策分量在感知距离小于18 m之后陆续出现拐点.而图9中最大的感知距离是每个传感器最大感知距离的最小值,超过这个值感知对象就超出了某些传感器的最远感知范围.本仿真实验中视觉传感器的最大感知距离最小,取值为60 m.
3 结论
1) 基于感知对象覆盖面积的传感器布置优化方法通过应用传感器感知区域指数衰减模型实现了不同类型传感器的感知区域的归一化建模,避免了不同维度感知数据的数据融合,降低了多类型传感器综合感知效果评价的复杂程度,将布置优化方法的适用范围从同类传感器拓展到多类型传感器,使布置优化方法更贴近实际问题.
2) 运用感知对象的离散化实现了传感器感知区域与感知对象耦合关系的判定和覆盖面积的计算,以覆盖面积为优化目标的数学模型实现了传感器安装位置和安装角度的集成优化.将基于感知对象覆盖面积的传感器布置优化方法应用在自动驾驶车辆的传感器布置中,与传感器厂家指导外部参数下的感知效果相比,本文提出的优化方法能够提升传感器的感知效果,即使用确定数量的传感器获得尽可能多的环境感知信息,从而使得自动驾驶车辆在环境感知时使用更为科学、经济的传感器布置方法获得更多环境信息.
