基于PLC控制TL1000t运输车电气系统分析
2020-11-19贾贵青刘刚
贾贵青 刘刚
摘要:TL1000t运输车是运输梯形梁的重要设备,因为梯形梁的特殊性所以对运输车的转向和行驶要求比较高。转向和行驶的驱动系统为液压系统,多轮组同步转向 在PLC控制中采用PID调节实现了多轮组同步。
关键词:运输车;PLC控制;电气控制
引言
随着社会的发展,交通运输的发达,桥梁的建设也在高速发展中,为了满足各种桥梁的建设需求而生产了不同运输车,TL1000t就是为了满足梯形梁的运输而设计生产。梯形梁的特殊性就要求运输车转向系统有较高的同步性。TL1000t运输车是靠发电机组、电动机和液压泵提供动力的重型车辆,其中控制对象为液压控制系统中配置的各种液压元器件,本文主要是对其电气系统控制的分析。
1 TL1000t运输车的构成及工作原理
TL1000t运输车主要是由框架结构,液压系统:包括转向系统、驱动系统、升降系统以及称重系统,电气PLC控制系统及照明系统。电动机带动泵为转向系统、驱动系统以及升降系统提供动力。整车供电均由发电机组提供,发电机组提供AC460V、60Hz电源,控制系统由输入AC460V、60Hz转变为DC24V的开关电源提供,照明系统由输入为AC460V、60Hz转变为AC110V、60Hz的变压器提供。
TL1000t运输车的主液压泵采用的是力士乐A4VG180EP4D1闭式泵和A11VL0190LRDS开式泵。驱动系统主要有闭式泵和驱动马达来提供动力;转向系统和升降系统主要有开式泵和多联比例阀组成。电气控制对象为闭式泵、马达、多联比例阀以及液压的其它控制元件。
2 电气控制系统硬件设计
TL1000t运输车的电气控制系统的硬件主要采用的是基于CAN总线通讯的德国Rexroth的30系列的RC28-14、RC20-10和DI3显示器 ,系统维护和扩展非常方便。为了为桥梁工程施工提供良好的工作环境,
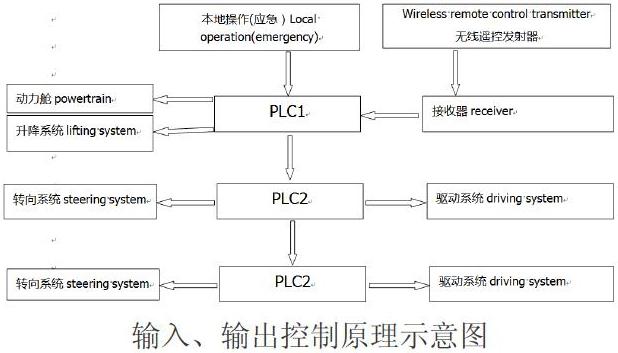
PLC是控制中心,它是由电源、中央处理器、I/O、A/D、D/A等元件组成的具有严密高速的处理能力的程序控制器,具有大程序容量和存储单元。另外,CPU单元具有32位高速处理能力,4个CAN通讯接口,可实现实时数据传输、采集,与人机界面进行连接,实时程序传送监控等处理。人机界面用于输入控制系统的控制参数以及显示动态监控参数:各个位置的压力显示、转向角度显示、编码器的在线情况、各个阀组的在线情况、编码器角度标定以及系统报警等等。输入输出控制原理示意图如下:
微型控制器的应用,使运输车的一些重要功能得以实现,如行驶速度、转向角度、升降高度等参数可根据施工需要进行设定,显示屏上可显示一些必要的动态参数,如悬挂的动作状态、转向动作的实施角度等等。在转向过程中,控制系统根据给定的转向角度、转向模式以及编码器反馈的角度建立复杂的数学模型,计算出理论的转向角度,在根据实时的转向角度与理论的转向角度的偏差通过PID控制自动调节电磁比例阀的工作电流,从而使各个轮胎的转向角度接近理论角度,达到精确控制转向角度、升降高度的目的。
2.1 电气软件设计
(1)驱动系统
驱动系统主要有液压闭式泵、驱动马达、马达转速传感器组成。遥控器的驱动控制手柄输入驱动速度前进或者后退AI信号,控制器进行A/D和D/A轉换后根据要求输出PWM电流信号到驱动泵和驱动马达。通过马达转速传感器的FI信号反馈来判断车辆的速度快慢以及是否有轮组打滑。根据马达转速传感器的信号通过PID调节来控制驱动泵以及驱动马达的电流,从而实现车辆的平稳行驶。
(2)转向系统
转向系统主要有液压开式泵、多联转向阀、转向油缸以及编码器组成。转向系统是靠悬挂的摆动来实现,悬挂机构包括平衡臂、悬挂油缸、悬挂架和回转支承等四部分,其中悬挂油缸为单作用柱塞式液压缸,它承担着本轮轴的全部负载,编码器是转向系统中重要的组成部分。编码器由数据采集装置和数据处理装置、CAN总线控制器三部分组成,单片机是编码器电路系统的核心部分,它将编码器的信号(粗码、中精码、精码)采集到后,经精码细分、码道校正、数字量相加、电调零、度分秒转换等软件处理,最后显示及实现与控制系统接口。转向系统也是靠该液压油缸的伸缩来实现的。遥控器的转向角度控制手柄输入转向角度和方向的AI信号,同样控制器进行A/D和D/A转换后根据不同转向模式的不同进行角度的转换,将理论角度转换成不同的PWM电流信号输出到对应的阀组,以实现转向角度的控制和转向模式的控制。
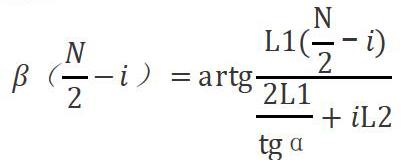
为了满足不同的施工工况,运输车设计了不同的转向模式:八字转向模式、斜行模式、摆头转向模式、摆尾转向模式和原地转向等五种转向模式。此文以八字转向模式为例进行计算说明:
转向角度的计算:
这是八字转向模式的前半部分轮组的转向角度,后半部分的转向轮组以运输车的中心轴对称以此与前半部分轮组的角度相对应,但其方向完全相反,转向手柄给定角度后PLC通过计算后给控制轮组的电磁阀电流,编码器实时监测着角度的变化并反馈给PLC,PLC根据编码器的反馈信号进行PID调节,以便轮组能同步并快速的转到给定角度。
(3)升降系统
升降系统主要有液压开式泵、升降油缸、升降多路阀以及压力传感器组成。遥控器的升降控制手柄输入升降AI信号,控制器进行A/D和D/A转换后根据要求输出PWM电流信号到升降多路阀。通过压力传感器的AI信号反馈来判断车辆的升降速度快慢。
3 结语
随着我国经济的发展,我国的工程机械也在高速发展,不仅适应于国内,逐渐走出国门,走向世界。本文所讲述的运输车就是为加拿大的一个项目所设计。本文主要是对运输车的驱动系统、转向系统以及升降系统的控制进行了简单的技术分析。
参考文献:
[1]毛佳唯.基于PLC实现的自动化电气控制应用探析[J].科学技术创新,2019(13):175-176.
[2][1]徐广明,杨伟红,刘克铭.基于PLC的车间运输小车的自动控制系统设计[J].世界科技研究与发展,2009,31(4):663-665.