基于无人机激光点云的树障检测与砍伐树木数量估算*
2020-11-19张苏齐立忠韩文军朱笑笑习晓环王成王濮聂胜
张苏,齐立忠,韩文军,朱笑笑,习晓环,王成,王濮,聂胜†
(1 国网经济技术研究院有限公司 电网工程航空遥感与线路智能巡检联合实验室, 北京 102209; 2 中国科学院遥感与数字地球研究所 数字地球重点实验室, 北京 100094; 3 中国科学院大学, 北京 100049)(2019年10月17日收稿; 2019年12月31日收修改稿)
电力走廊内的树木生长过快会对电力线路安全运行造成威胁,从而形成树障隐患。精确检测树障隐患,确定危险树木的准确位置和数量,并将树障区域内的危险树木进行砍伐对电网安全至关重要[1-2]。传统的树障检测通常是基于人工巡查的方式实现的,电力部门工作人员亲自到现场测量输电线路到树木的距离并记录下来,一旦超过安全距离,则视为存在树障隐患[3-4]。这种方法的树障检测结果受人为因素的影响极大,且会危及巡线工人的生命安危。同时该方法树障检测质量无法得到保障,线路的安全状况亦得不到保证。总之,传统基于人工巡检方式的树障检测巡检周期长、作业强度大,无法保证树障检测结果客观性与完整性,可靠性差,难以满足智能电网建设和大电网安全的需求[3-5]。如何提高输电线路的树障检测精度和效率,成为困扰电力行业的一个重大难题。国内外越来越多的研究学者开始利用低空可见光航拍影像、倾斜摄影等对架空输电线路进行树障检测[6-7],这种树障检测方式虽然在一定程度上大大提高了效率,但存在定位精度低、不稳定等问题,且无法实现三维空间的精准量测,很难精确判断线路走廊内树木到导线的距离,无法实现树障的有效检测。
机载激光雷达技术的快速发展,使其成为树障检测最具潜力的技术之一。机载激光雷达技术通过集成激光扫描仪、GPS差分定位以及IMU姿态测量,生成高精度、高密度的三维激光点云数据,进而快速获取电力廊道内各类地物的高精度三维空间信息[8-9],且激光雷达技术能够实现三维空间的精准量测,从而精确判断树木到导线的距离进而大幅提高树障检测的精度[10-13]。此外,基于机载激光点云数据能够实现单木尺度的精准分割,从而高精度估算树障内需要砍伐树木的数量。因此,基于机载激光雷达获取的三维激光点云数据,能够快速发现和检测树障区域,且能精确确定需要砍伐树木的数量。
目前已有学者基于激光雷达开展了树障检测研究[12, 14-18]。毛强[15]提出基于机载激光雷达数据的输电线路树障检测方案,该方案可以有效检测出树障点,但是其首先要构建输电线路走廊三维数字模型,大大增加了工作量且树障检测精度受三维模型精度的影响。阮峻等[16]提出基于固定翼无人机激光雷达点云数据的输电线路三维建模和树障分析方法,但是该方法不是基于原始的电力线点云数据进行树障分析,而是基于拟合的电力线,其与原始点云存在一定的误差,会降低树障检测的精度。丁薇等[17]提出一种输电线路走廊树障自动化检测方法,其直接利用电力线点云数据实现树障检测,但需计算每个电力线点到每个植被点的距离,工作量大,计算效率低。因此基于无人机激光雷达技术的输电线路树障检测应用在国内外尚处于探索阶段,还未形成完整、高效的技术方案。此外,已有的研究重点关注树障隐患区域的检测,没有进一步确定需要砍伐树木的数量及其准确位置,也就是说目前没有利用激光雷达开展树木砍伐树木数量估算的研究,该领域尚属空白。
本项目基于无人机系统获取激光雷达数据,开展基于无人机激光三维扫描技术的树障检测和砍伐树木数量估算研究,精确检测出树障隐患区域的位置与范围,确定需要砍伐树木的棵数,并给出砍伐每木的位置、树高等信息。总之,所提方法可以快速发现与检测树障隐患,为树障隐患的消除提供技术支撑,同时为电网运维单位制定树木砍伐计划提供可靠依据。
1 无人机激光雷达数据
为了验证树障检测与砍伐树木数量估算方法的可行性,本研究利用无人机搭载Riegl VUX-1激光雷达系统获取安徽电力输电廊道500 kV电压的高精度激光点云数据,该电力廊道激光点云数据长度达10 km。研究区以丘陵为主,海拔范围为68~316 m,地形起伏较大(地形坡度范围为0°~45°),且植被覆盖比较密集。无人机飞行高度为150 m,激光点云密度为100 点/m2,激光点云水平精度和垂直精度分别为20和10 cm。本研究获取的激光点云密度和精度均能够满足后期点云分类、树障检测和砍伐树木数量估算的需求。
2 研究方法
本文提出一种基于无人机激光点云的树障检测与砍伐树木数量估算方法。该方法首先通过对无人机激光点云进行去噪预处理、点云分类处理,实现植被点与电力线点的精细分离,然后通过树障检测确定树障隐患区域,最后对隐患区域树木进行单木分割,精确估算需要砍伐的树木数量,其总体技术流程图如图1。
2.1 激光点云去噪预处理
由于环境、设备、人为等因素影响,激光扫描数据通常存在噪声点,进而影响后续数据处理与应用[19-20]。相比信号激光点的聚集分布,噪声点分布比较离散且随机。鉴于激光信号点云和噪声点云的明显差异,本项目拟提出基于点云局部空间分布统计的去噪算法。首先基于原始激光雷达数据的点云密度进行分段处理,然后建立点云局部高程频率直方图,最后利用最大类间方差法设置自适应阈值实现激光信号点云与噪声点云的有效分离。
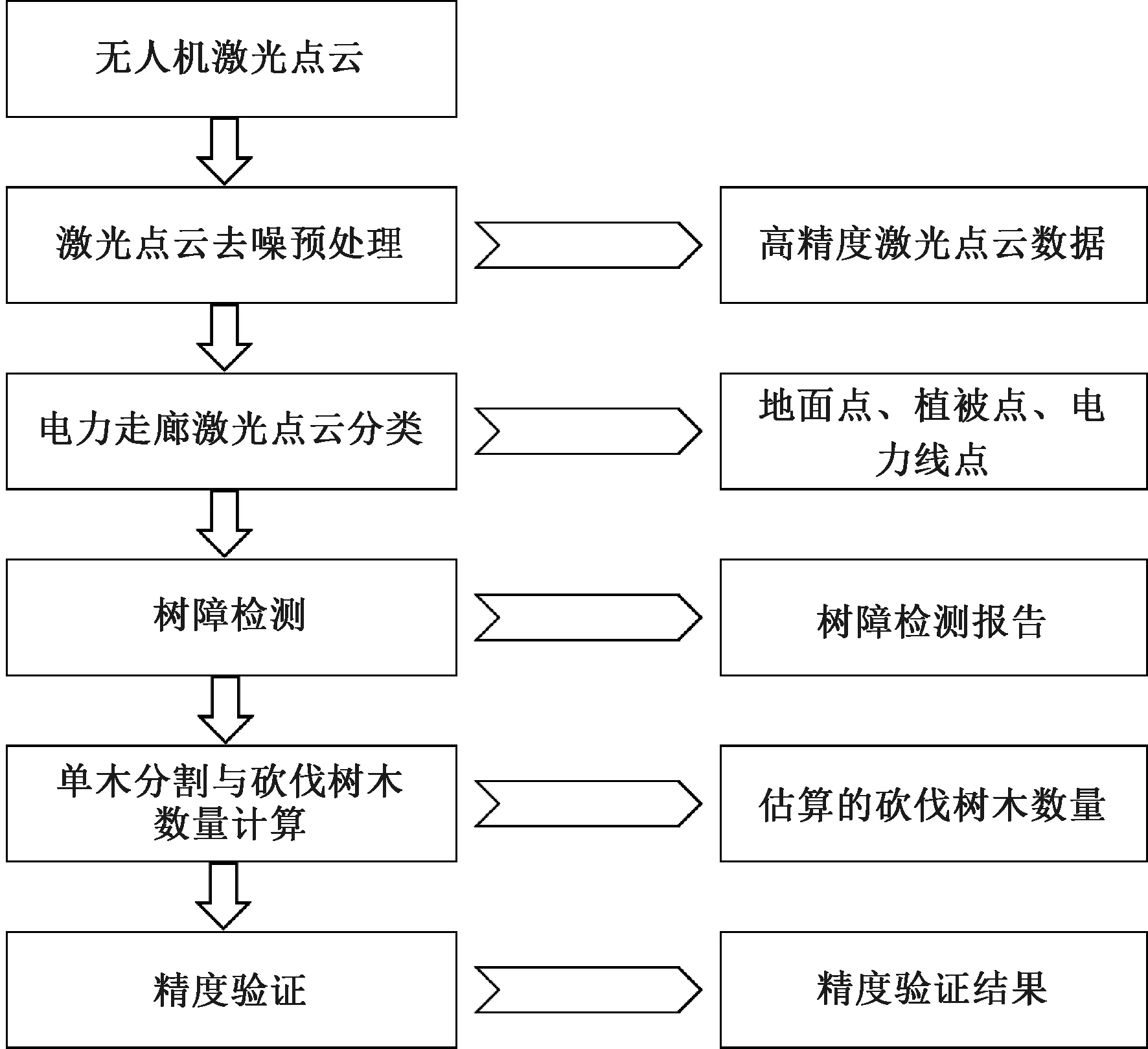
图1 算法总体技术流程图Fig.1 The overall flowchart of algorithm
2.2 激光点云分类
1)点云滤波
利用朱笑笑等[21]提出的多级移动曲面拟合的自适应阈值点云滤波方法快速实现地面点和非地面点的分离,此方法首先对去噪后的点云数据划分格网建立格网索引,初始格网大小根据研究区最大物体(比如建筑物)大小确定,然后利用每个格网中的最低点建立曲面方程,最终通过高程阈值分离地面点和非地面点。此方法基于真实高程与拟合高程的差值自动设置高程阈值,具有一定的自适应性,能够快速且准确地实现地面点和非地面点的分离(图2)。
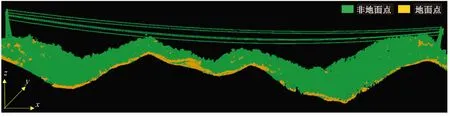
图2 点云滤波结果Fig.2 The result of point cloud filtering
2)电力线点提取
滤波后的非地面点中含有电力线点和其他地物点,其中电力线是悬空状分布的,基于电力线点云的空间分布特征,可以粗提取电力线点云[11, 22-24],此时电力线点云中可能包含其他地物点,因此基于电力线点的投影分布特点,采用随机抽样一致性算法(random sample consensus, RANSAC)实现电力线点的精确提取。首先,基于电力线在水平面上的投影呈线性分布的特点,利用RANSAC直线拟合的线性检测方法剔除与电力线不在同一线上的噪点;然后基于电力线在垂直面上的投影呈抛物线分布的特点,采用RANSAC抛物线拟合剔除与高压线处于同一垂直面上的噪点;最终在剔除所有噪声点后实现电力线点云的精提取,提取精度高达98.1%,完全可以满足树障检测的要求(图3)。
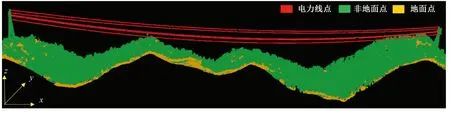
图3 电力线点提取结果Fig.3 Extraction results of power line points
3)植被点提取
电力线点提取后,非地面点仍旧包含植被点、杆塔点和建筑点。本文首先利用植被分布区域与杆塔分布区域的相对高度差异,设置一定的高度阈值去除非地面点中的杆塔点;然后根据树木和建筑物在几何形态上的巨大差异,实现植被点和建筑物点的精确分离。建筑表面平坦且局部面元的法向量趋向于竖直状态,不同面元的法向量之间也近似平行或呈现一定的规律性;而植被叶片方向随机分布,植被点局部法向量方向杂乱无序,不同法向量的夹角在[0,π]之间随机分布。因此本研究采用法向量分析法来分离植被点和建筑物点,进而实现植被点的精细提取。该方法首先基于局部点云计算每个点的局部面元法向量;然后比较目标点局部面元法向量与邻域内其他点的法向量,并计算法向量夹角的方差;接着建立法向量夹角方差的频率直方图;最终根据频率直方图呈现双峰分布,将双峰之间的波谷位置设置为阈值,将方差小于阈值的点判定为建筑物点,否则为植被点,植被点提取结果见图4。
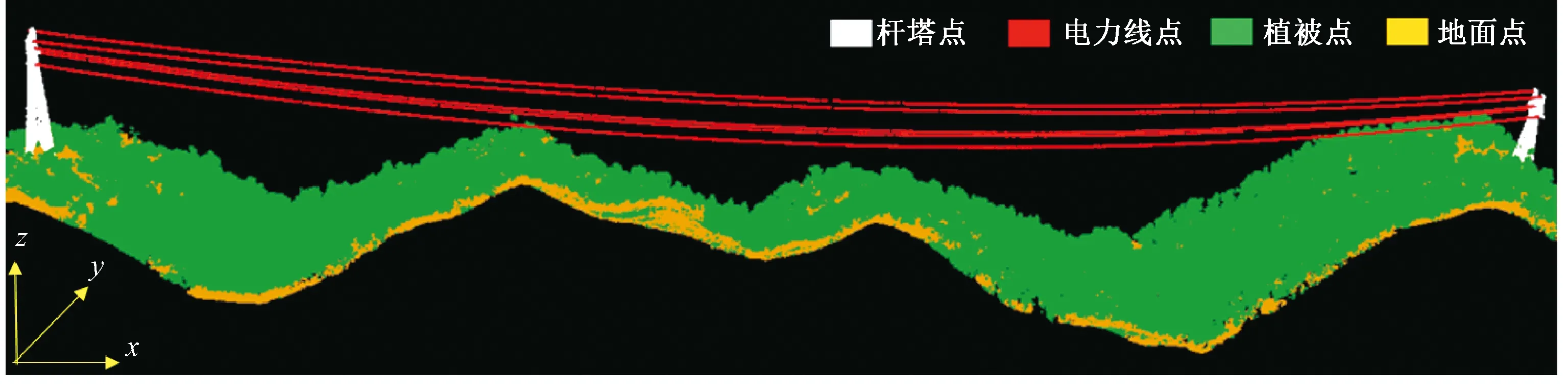
图4 植被点提取结果Fig.4 Extraction results of vegetation points
2.3 树障检测
点云数据分类完成后,可以通过判断导线与植被之间的距离是否超过安全规范实现树障检测。目前最常用的树障检测方法是分别计算每一个电力线点到每个植被点的距离,从而分析是否超过电力线安全运行所规定的安全距离阈值,如果超过安全距离,则将该植被点当成树障点。该类方法能够有效检测树障位置和范围,但是该算法复杂度高、计算量大,难以满足快速检测的需求。为了提高树障检测的效率,本文首先将电力线点沿x方向进行分段,通过实验发现分段间距为1 m时,计算效率和精度均很高。对每段电力线点,找出其所在x范围内的所有植被点,并计算该段所有植被点到电力线点的水平、垂直和净空距离,然后与安全距离进行比较分析,最终精确检测出树障点,并确定树障隐患区域的位置和范围。
2.4 单木分割与砍伐树木数量估算
本文单木分割与砍伐树木数量估算方法通过对树障隐患区域的植被点进行单木分割,从而确定砍伐树木的数量,主要包括单木分割、砍伐树木数量估算和精度验证3个部分。
1)单木分割算法
分别利用基于冠层高度模型(canopy height model, CHM)和无人机激光点云的单木分割方法实现单木点云的精确分离[25-26]。基于CHM分割使用分水岭分割算法,首先分别基于地面点和植被点生成数字高程模型(digital elevation model, DEM)和数字表面模型(digital surface model, DSM);然后DSM减去DEM可以得到CHM,把CHM模型的局部最大值认为是冠顶,低点是冠层底部,从而利用分水岭的原理实现单木的高精度分割;基于点云的单木分割采用归一化分割(normalized cut, Ncut)方法[25-26],该方法首先提取点云的局部最大值作为初始树顶,然后利用Ncut方法进行初始单木分割,接着进行迭代约束进一步探测冠层中下层单木,进而尽可能识别所有的单木。
2)砍伐树木数量估算方法
在树障隐患区域,对植被点进行单木分割,经分割后可以获取每木的位置、树高、冠幅等信息,然后重新计算分割后每棵树木到电力线的水平距离、垂直距离和净空距离,最后统计超出安全距离范围的单木数量,进而精确确定需要砍伐树木的数量。
3)精度验证
电力走廊单木分割和树木砍伐数量估算精度评价采用人工实地验证,以人工实地勘测确定的砍伐树木作为真值进行精度评价。本研究将采用召回率R、正确率P、总体精度F3个指标来评价精度。其中R是正确砍伐的单木数量与真实需要砍伐树木数量的比值,P是正确砍伐的单木数量占提取单木数量的比例,F表示综合考虑R和P的总体精度。因此,F可描述如下
(1)
3 实验结果分析与讨论
1)树障检测
利用无人机激光雷达数据对该试验区进行树障检测,其中一段电力线的树障检测结果如图5所示。由图5可知,总共检测出树障隐患区域2处。每处树障隐患的相关信息,包括位置、距离等均以树障检测报告的形式输出,如表1所示。为了验证本文树障检测方法的有效性,采用两种不同的方法进行树障结果的检验。第1种方法是对植被点和电力线点进行手工距离量测,利用“点云魔方”软件中的距离量测工具,手动测量植被点与电力线点的水平和垂直距离,结果共发现两处树障隐患区域。通过测量树障隐患所在的位置及其与电力线的水平距离、垂直距离等,可以发现通过手工量测的树障结果与本文提出树障检测算法结果基本一致。第2种方法是通过实地勘测,同样发现存在两处隐患,并且隐患区域的位置和范围与树障结果同样呈现一致性。
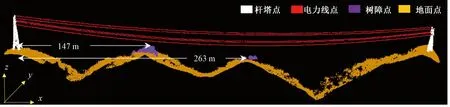
图5 危险点分布图Fig.5 Distribution of dangerous points

表1 树障检测报告Table 1 Danger tree detection report
2)单木分割与砍伐树木数量估算
本研究分别利用基于CHM和点云的分割方法对树障隐患区域进行单木分割,其中基于点云的单木分割结果如图6所示。结果表明,基于点云的单木分割方法能有效地分割单木点云,不仅可以识别大的单木,还可以分割中下层单木,而基于CHM的分割方法仅能识别大的单木。
利用上述两种方法分割之后,统计分析树障隐患区域内的单木数量,对砍伐树木数量进行估算,最终采用实测数据对单木分割与砍伐树木数量估算方法进行精度评估,其结果见表2。由表2可知,两种方法均能够识别需要砍伐的树木,其砍伐树木数量的估算精度达到90%,一定程度上表明本文提出的方法能够适用于确定树障隐患区的砍伐树木数量。此外,结果还表明相比基于CHM的方法,基于点云的方法能够更好地估算砍伐树木的数量,这是因为基于CHM的单木分割方法无法有效检测下层低矮树木,而基于点云的单木分割采用Ncut方法,能够进一步探测中下层树木,从而提高砍伐树木数量估算精度。
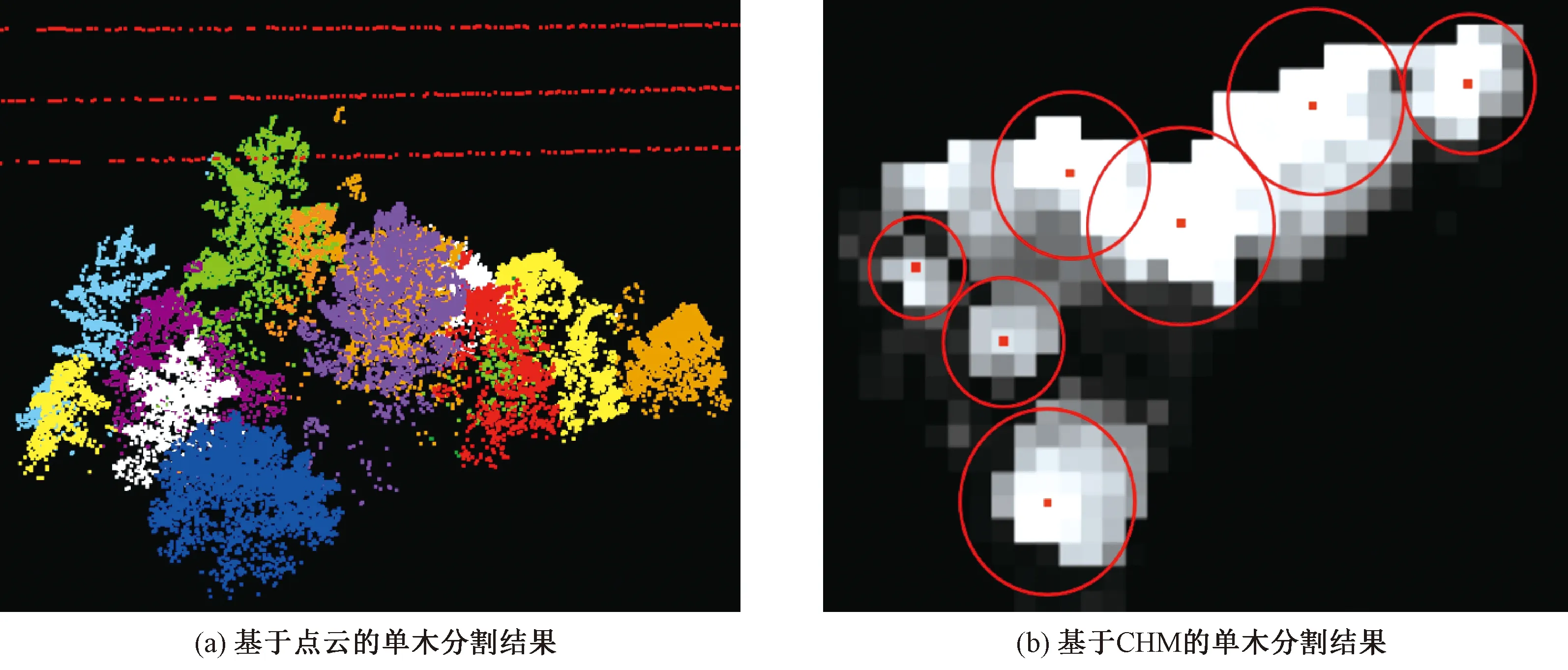
图6 单木分割结果Fig.6 The results of tree segmentation

表2 单木分割与砍伐树木数量估算方法精度验证结果Table 2 The validation of individual tree segmention and danger tree number estimation
虽然本文提出的砍伐树木数量估算方法具有比较高的估算精度,但仍存在一定的误差,这极可能是由于单木分割引起的,基于点云的单木分割算法能一定程度地实现单木的有效分离,但仍存在过分割与欠分割的问题,进而给砍伐树木数量估算带来不确定性。
4 结论
本文提出一种基于无人机激光雷达点云数据的树障检测与砍伐树木数量估算方法。该方法通过点云精细分类、树障检测分析以及单木分割等步骤,有效检测出树障的具体位置和区域范围,并实现砍伐树木数量的精确估算。总之,本文研究为电力线安全提供了遥感技术支持,同时为电力基层单位制定砍伐计划提供了重要的参考依据。然而本文的研究着重分析当前工况下树障检测与砍伐树木数量估算,无法实现树障的预警分析,也无法明确未来时期树木的砍伐计划。未来研究将着重树木的智能生长模型研究,从而进行树障预警分析,并结合机载激光点云数据制订更为科学的巡检频率与砍伐计划。
