汽车倒车雷达设计
2020-11-16吴敏
吴敏

摘要:倒车雷达是汽车驻车或者倒车时的安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员驻车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷。
关键词:汽车;倒车雷达;设计
一、倒车雷达相关技术
1) 抗同频干扰技术
在倒车雷达中,探头发射一定频率的超声波,接收的主要还是这个频率的信号。但在实际使用环境中会存在同频或倍频的信号,这样如果处理不当,就会误判,影响系统的正常工作,降低系统的可靠性。对此,可以采用独特的软件滤波方法,去除干扰信号,大幅度降低误判。在硬件设计上,可以将发射和接收信号电路设计在探头内部,使抗干扰性能得到根本性的突破。
2) 不探测地面技术
超声波发射器、接收器是压电陶瓷片材料,由于本身特性,发射时在水平方向上和垂直方向有一定角度(见图1),这样如果探头水平安装,行车中难免会收到地面的回波。因为路面可能凹凸不平,还有石头、木块等杂物,再者还与负载有关,探头与地面距离也不一样,增加回波的复杂性。通过与机构配合设计可使超声波在垂直方向上有效地克服探测到地面。
3) 抗共振技术
倒车雷达的探头传感器安装在车的保险杆上,这样探头传感器就和车一样经常在各种振动环境下工作。要使探头传感器能正常工作而不受颠簸影响,需要设计一种有效的吸振防料,要求其具有良好的弹性,能防止探头与保险杆形成共振,这样就可保证倒车时超声波均发送、接收不受车体振动的影响。
二、超声波发送模块设计
超声波发送模块包括超声波产生电路和超声波发射控制电路两个部分,超声波探头(又称超声波换能器)选用CSB40T,可采用软件发生法和硬件发生法产生超声波。软件发生法利用软件产生40kHz的超声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生超声波。这种方法的特点是充分利用软件,灵活性好,但需要设计一个驱动电流在100mA以上的驱动电路。硬件发生法是利用超声波专用发生电路或通用发生电路产生超声波信号,并直接驱动换能器产生超声波。这种方法的优点是无须驱动电路,但缺乏灵活性。
40kHz的超声波是利用555时基电路振荡产生的。其为保证555时基电路具有足够的驱动能力,宜采用+12V电源。CNT为超声波发射控制信号,由单片机进行控制。
三、超声波接收模块设计
超声波接收模块包括超声波接收探头、信号放大电路和波形变换电路3 部分。超声波接收探头必须采用与发射探头对应的型号,关键是频率要一致。由于经探头变换后的正弦波电信号非常弱,因此必须经放大电路放大。正弦波信号不能直接被单片机接收,因此必须进行波形变换。按照上面所讨论的原理,单片机需要的只是第一个回波的时刻。接收电路的设计既可采用专用接收电路,又可采用通用接收电路。
超声波在空气中传播时,其能量的衰减与距离成正比,即距离越近信号越强,距离越远信号越弱,通常在1mV~lV。当然,不同接收探头的输出信号强度存在差异。由于输入信号的范围较大,对放大电路的增益提出了两个要求:一是放大增益要大,以适应小信号时的需要;二是放大增益要能变化,以适应信号变化范围大的需要。
四、语音电路设计
语音报警是指当倒车雷达探测到的距离小于所设定的安全值时,发出声音提醒驾驶员。
M3720是单声一闪灯报警音效集成电路,芯片内存储一种报警音效,可直接驱动蜂鸣器发声或经外接功放三极管推动扬声器放音,同时还能驱动一只LED闪烁。该芯片各引脚功能为:5脚VDD、1脚VSS分别为电源输入端与负端,VDD电压为3~3.5V;8腳X和7 脚Y分别为芯片外接振荡电阻器端;6脚TG为触发控制端,低电平触发有效;3脚BZ和2 脚BB分别为报警音效输出端,可直接外接压电陶瓷蜂鸣器,如果驱动扬声器则由3 脚BZ端引出;4脚L为闪灯输出端,可直接驱动LED发光。
五、技术标准
在进行倒车雷达设计时,需满足以下技术标准:
1)电源技术标准
采用12V供电的产品,其工作电压范围为9.6~16V,消耗功率不超过1W。
2) 系统自检功能技术标准
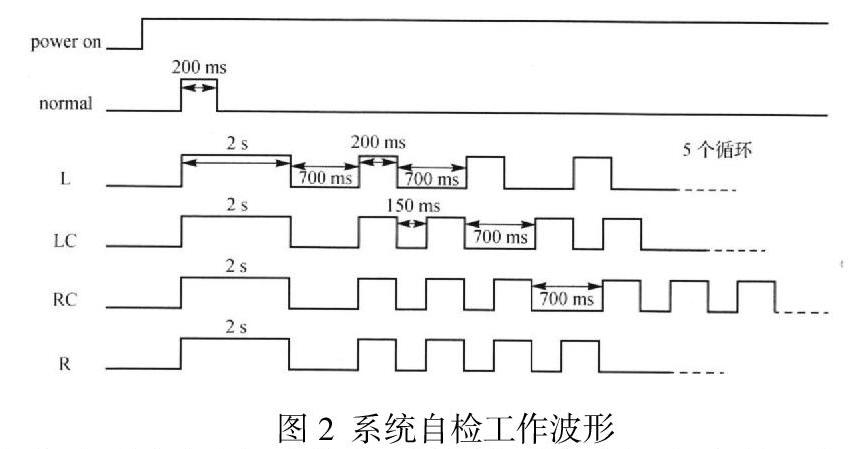
对于自检功能,当挂人倒车挡后,倒车雷达进行自检。当系统自检正常时,蜂鸣器响1 声,=200ms;当系统自检不正常时,蜂鸣器长鸣2s,然后报警故障探头。其工作波形如图2 所示。
注意:如果有多个探头故障,则连续报警每个探头,但循环次数改为3 次。最大探测距离为140cm。
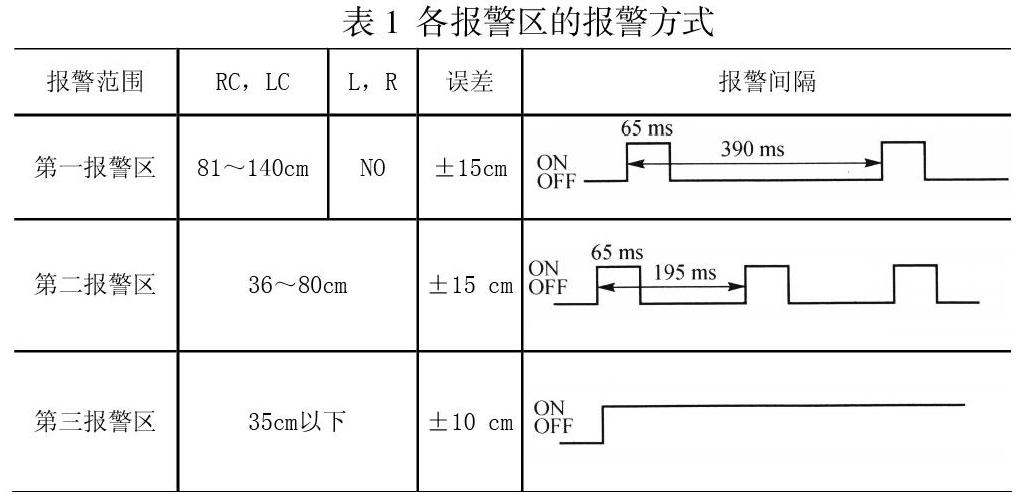
3) 探测报警区技术标准第一报警区:81~140cm第二报警区:36~80cm第三报警区:35cm以下各报警区的报警方式见表1
4) 测试条件技术标准
(1)正常测试条件。温度:15~35℃
相对湿度:25%-75%大气压力:86~106kPa
试验电压:(12±0.1)V(12V供电)
探头离地面高度:依实车安装高度
(2)极端测试条件。
温度:-30~85℃
相对湿度:测试箱内不出现过分凝结水
试验电压:(12±0.1)V(12V供电)
探头表面:低温时探头表面冰块或冷凝水应清理
探头离地面高度:依实车安装高度
