基于单片机的智能语音分类垃圾桶的设计与实现
2020-11-16索忠祥董香丽
索忠祥 董香丽
摘要:随着我国经济的快速发展和人们消费水平的不断提高,垃圾产生的数量和种类变得越来越多。本文设计了一种基于STC89C52RC单片机的智能语音分类垃圾桶,本系统由STC89C52RC单片机、LD3320语音识别模块、HC-SR501人体红外传感器模块、SW-1801P震动开关模块、SG90舵机模块、DY-SV17F语音播报模块和HX711称重模块组成,采用了单片机技术、非特定人语音识别技术、传感器技术和舵机控制技术。
关键词:智能分类垃圾桶;LD3320;非特定人语音识别技术;语音播报
1系统组成
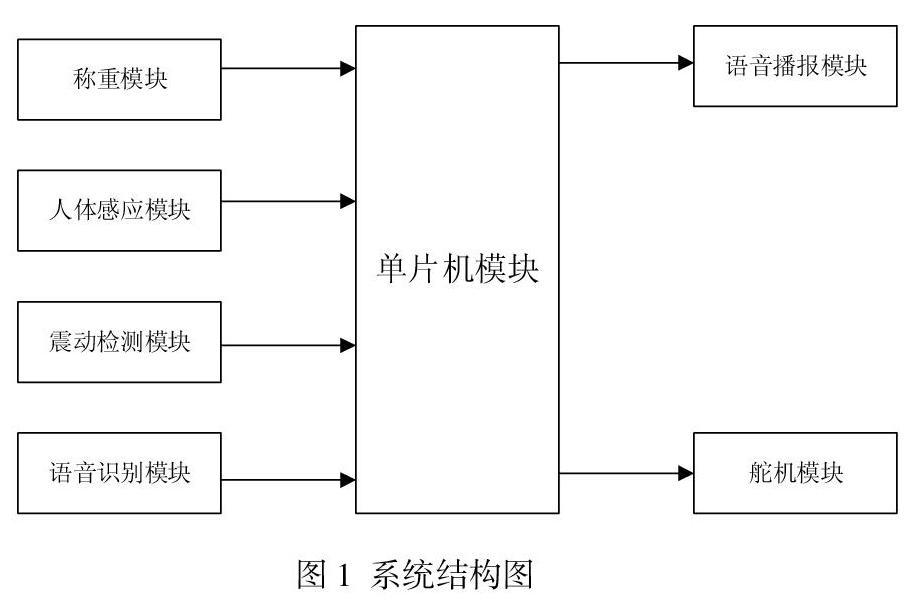
本系统采用单片机作为核心CPU,它的信号输入源是语音识别模块、人体感应模块、称重模块和震动模块。单片机对输入信号进行处理后,向语音播报模块和舵机模块发送相应的控制信号,控制相应模块开始工作。系统结构如下图1 所示。
2系统功能
具体功能实现如下:
(1) 通过语音识别模块获取扔垃圾者口述的语音信息,并且对其中的关键字进行识别和匹配,匹配成功后将此信号传送给单片机,单片机在收到信号后控制语音播报模块通过喇叭播报垃圾的种类,并且驱使相应垃圾种类的舵机转动,实现垃圾桶开关盖。
(2) 采用称重模块获取垃圾桶内的重量信息。单片机实时获取由称重模块传过来的重量信号,当单片机判断桶内垃圾重量达到预定的阈值时,控制语音播报模块播报相应的音频文件,提示垃圾桶满了。
(3) 采用人体感应模块检测垃圾桶前是否有人。人体感应模块检测到有人时,会产生相应的电压信号,当单片机获取到该电压信号时,控制语音播报模块播放响应的音频文件,同时也驱使舵机做开关盖动作。
(4) 采用震动检测模块检测是否产生踢桶的行为。震动检测模块检测到有震动感应产生时,会产生相应的电压信号,当单片机获取到该电压信号时,控制舵机模块做开关盖动作。
3系统设计
3.1 系统硬件设计
3.1.1 LD3320语音识别模块
LD3320芯片在通过麦克风接收到用户的音信息后,首先会将采集到的语音信息转化成数字信号,并且对数字信号进行分析,获取这段语音信息在频率分布上的特征,然后用芯片内部预存的关键词的特征和获取到的特征进行相似度匹配,匹配成功将最优的一条词语信息输出,匹配失败输出识别失败指令。
3.1.2 语音播报模块
根据系统功能设计,DY-SV17F只启用了前四个I/O口。DY-SV17F未接收到单片机的指令时它的I/O引脚保持高电平信号。当DY-SV17F接受到单片机的指令时,它会控制与单片机相连的I/O口产生不同的高低电平信号,不同的I/O口高低电平组合对应着不同的音频文件。单片机通过控制与DY-SV17F相连的I/O口组合产生不同的高低电平信号来表示想要播放的音频文件,DY-SV17F通过外连的扬声器播放音频,播放完毕后I/O口会变回为低电平。
3.1.3 称重模块
(1) 压力传感器
压力传感器具有R1、R2、R3和R4四个电阻应变片。当压力传感器收到外力时,会使R1、R2、R3和R4被挤压或者拉伸发生形变,它们的阻值会因此变大或者变小,产生出不同的电压值,从而可以将非电量转化为电量输出。
(2) HX711称重芯片
压力传感器产生电压信号后通过A通道将电压信号传送给HX711芯片,A通道可以将电压信号增强到128倍,HX711芯片接收到增强的电压信号后运用电压转换重量公式对其进行轉化计算,最后输出转化后的值。单片机通过读取HX711输出的数据就可以获取到现在垃圾桶重垃圾的重量。
3.1.4SG90舵机模块
单片机通过信号线向SG90的控制电路发出控制信号,SG90的控制电路在接收到后首先会让电机开始工作发生转动,同时促使齿轮组也开始转动,将动力传送到输出舵盘。舵机内部有一个反馈电位计,当舵盘受到动力转动时,同时反馈电位计也会转动,然后输出电压信号到控制电路板,代表着当前的位置,从而控制电路板可以确定当前电机的转速和方向,达到控制的效果。
SG90的控制信号是由单片机发出的PWM信号,它的脉宽0.5ms-2.5ms对应着控制SG90输出轴转角0-180度。SG90收到PWM控制信号后会控制它的输出轴转动到对应脉宽的角度上,直到它再次收到另一个脉宽的控制信号才会控制转动输出轴转动。
3.2系统软件设计
主程序对各个模块进行初始化后,调用子程序控制各个模块开始工作,子程序将输出的结果以指令的方式发送到主程序和舵机控制程序。主程序收到由各个子程序发送回来的指令信息后,通过switch语句对其进行循环判断,判断完成后再输出相应的指令到语音播报程序和舵机程序,从而达到播放相应的音频文件和控制相应的舵机转动的效果。
4系统测试与结果分析
经过对硬件和软件的不断调试,最终达成了系统设计的目标。本次系统设计满足以下要求:垃圾桶可以实现语音识别垃圾种类功能。扔垃圾者口述垃圾名称,垃圾桶识别成功后会在1 秒钟内播报出该垃圾名称所属的垃圾种类,并且相应垃圾种类的垃圾桶盖也会打开和闭合。垃圾桶可以实时检测桶内垃圾重量,达到阈值时可以会语音预警。当桶内垃圾超过1Kg时,垃圾桶会在1 秒种之内自动语音提示:“主人,垃圾桶满了”,提示垃圾桶需要清理,同时垃圾桶盖会自动打开和闭合。垃圾桶可以实现人体感应开盖功能。当有人在垃圾桶上方10厘米内伸手时,垃圾桶会1 秒种之内语音提示:“主人,有人靠近”,同时垃圾桶盖会自动打开和闭合。垃圾桶可以实现脚踢垃圾桶开盖功能。当有人用脚轻踢垃圾桶时,垃圾桶盖会自动打开和闭合。
5总结
随着社会的发展和科技的进步,智能语音分类垃圾桶很快便会普及到我们的日常生活中。
本次系统设计的目的是为了提高人们的垃圾分类回收意识和垃圾的回收利用率,从而减少垃圾对环境的污染和人们对资源的浪费,更好的为人们服务。
参考文献:
[1] 廖如珺,黄建忠,杨丹蓉.中国城市生活垃圾分类处理现状与对策[J].职业卫生与病伤,2012(1):30-34.
[2] 范立南,白志强.基于单片机的智能垃圾桶系统设计[J].仪器仪表用户,2008(06):16-17.
[3] 许杰,王黎明,赵美玉.基于51单片机的生活小区智能垃圾桶控制系统设计[J].江苏科技信息,2019,36(36):55-57+75.
[4] 路廖逢钗.采用信噪比判决的双LD3320语音识别控制系统的设计[J].三明学院学报,2018(6):46-52.
[5] 汪倩倩,汤煊琳.基于蓝牙的生命探测机器人控制系统设计[J].机电元件,2018(6):6-8.
作者简介:
索忠祥,男,物联网工程16-01,山东协和学院学生;
董香丽(1987-),女,硕士研究生,讲师,山东菏泽,研究方向为物联网应用技术。
