光路偏振串扰误差对闭环光纤陀螺精度影响
2020-11-13宋昱寰管练武高延滨胡文彬
宋昱寰, 管练武, 高延滨, 胡文彬
(1.航空工业第一飞机设计研究院,陕西 西安 710089; 2.哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
由于光纤陀螺具有精度高、可靠性好等优点,相比于传统机械转子陀螺仪,其具有无转动部件、结构简单、成本低、便于批量生产等特性[1-2]。在军事和民用范围具有广泛的应用价值以及应用前景。光纤陀螺的硬件部分由光路和电路2部分组成。光路部分的光纤环作为敏感光纤陀螺角速率输出的重要元件,当环境温度发生变化时,光纤环的性能会受到影响[3],为降低温度变化导致的非互易性,一般采用对称绕法[4]。除此之外,在绕制光纤环时由于工艺原因还会在光路中引入应力双折射点,产生非互易性误差,导致光纤陀螺精度不能达到预期要求。文献[5]中建立光纤陀螺光路数学模型时,默认光纤环中仅存在一个偏振串扰点,故建立模型与实际光纤环有区别,与实际得到的相位误差不符。文献[6]在建立光纤陀螺光路的数学模型时未考虑不同温度情况下光路中器件的变化,与工程应用中的实际环境不符,不具有一般性。
本文充分考虑光路中的熔接点、光学器件参数,通过相干矩阵表示输入光信号特性、琼斯矩阵表示光学器件的传输特性以及熔接点。利用麦克尔逊干涉仪检测光纤环中偏振串扰点位置和强度。完善光纤陀螺光路模型,使之适用于工程环境下。为验证模型的准确性,本文通过理论仿真分析和实验结果分析温度对光纤陀螺静态零偏的影响,证实本文提出的方法能够作为光纤环质量评估手段。
1 光路部件及光纤陀螺光路建模
光纤陀螺误差源有2大部分:1)由于光路中各器件尾纤相接时,存在对轴误差角度,导致光信号传输至熔接点处时将发生偏振串扰现象;2)由于在绕环时工艺水平的限制以及操作不当引入的偏振串扰点。除此之外当温度环境发生变化时,这些偏振串扰点的位置和强度也随之变化。
对光纤陀螺光路中的光学器件进行建模[7],系统分析偏振串扰误差对光纤陀螺输出精度的影响。设定光波向光纤环传播的方向为顺时针,反之为逆时针,不考虑电路系统对光路的影响。光纤陀螺光路部分包括SLD宽带光源、光纤耦合器、光纤环、Y波导和PIN-FET探测器。根据光传播的途径对光学器件建模。文献[8]可以得到与光源偏振相关的光源相干矩阵模型;文献[9]可以得到光纤耦合器的琼斯矩阵;文献[10]可以得到与Y波导中起偏器的消光比ε相关的光纤偏振器琼斯矩阵模型以及加±π/2的相位调制时相位调制器的琼斯矩阵模型。
在目前相关的文献中,建立光纤环琼斯矩阵时,一般假设光纤环中仅存在一个串扰点[11],但在实际情况中光纤环内存在大量随机分布的偏振串扰点,且当环境温度变化时串扰点的位置和强度均发生变化。因此以往文献在通过光路模型分析光纤环静态零偏时与实际情况有所偏差。
本文通过麦克尔逊干涉仪测量光纤环中存在N个串扰点,并得到这些串扰点的位置和强度信息[12]。根据串扰点的位置信息,将2个串扰点之间的光纤长度等效为2个熔接点之间的尾纤长度;根据串扰点的强度信息等效为角度,将串扰点转化为熔接点。根据上述信息最终建立与温度相关的光纤环琼斯矩阵表达式:
(1)
(2)
式中:TCoil_CW和TCoil_CCW表示光信号在光纤环中顺时针和逆时针传播时的琼斯矩阵;Δn′(T)=-5.72×10-7T(t);结合图1所示,li表示第i个串扰点在光纤环中的位置,其中li+1-li=Li;ln表示光纤环中最后一个偏振串扰点到光纤尾端的位置;L表示光纤环长度;θi表示光纤环中第i个串扰点强度等效的对轴误差角度。式(1)和(2)中矩阵模型中各元素的值能够通过实验设备得到。
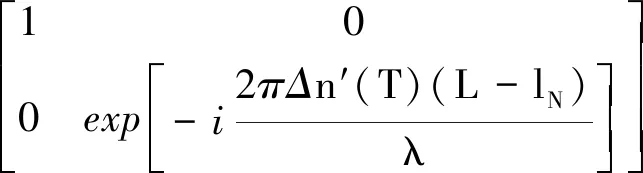
图1 光源偏振度与偏振串扰相位误差的关系Fig.1 Changes in the degree of polarization at the FOG output of the phase shift error
由干涉仪的工作原理可知在最大干涉条纹包络2侧对称位置各出现一个由两波列产生的干涉条纹,由此计算出偏振光的耦合强度为:
(3)
式中:Icm为干涉次峰包络的幅值;Im为干涉主峰包络的幅值。
且当麦克尔逊干涉仪补偿引入的相位误差后,对应的干涉包络,耦合强度分别为:
(4)
式中β表示起偏角度。当β=0时,干涉峰只剩下h1项,由式(4)可知,耦合光的强度是由对轴角度θ决定的,因此能够通过串扰强度得到光纤环内串扰点的对轴角度θ。
根据光纤陀螺光路原理图中光信号传输路径以及上述光路中串联的各光学器件的琼斯矩阵,建立光信号在光路中顺向和逆向传播时的琼斯矩阵分别为:
(5)
(6)
式中:φs表示Sagnac相移,光源和PIN-FET探测器之间的传输矩阵为:
G=GCW+GCCW=
(7)
则陀螺输出光信号的相干矩阵为:
J=GJsourceGH
(8)
探测器检测到光强为:
IOUT=Tr[JOUT]
(9)
若通过方波调制,即设置相位调制器施加±π/2相位。当光信号传播至相位调制器时,调制相位满足:
φm(t)-φm(t-τ)=±π/2
(10)
系统光路输出光强表示为:
Iout=I0+Nsinφs+Mcosφs=I0+IPsin(φs+φe)
(11)
式中:I0表示输出光强的常数项;Ip表示偏振串扰导致的光强变化;φe表示由偏振串扰导致的相位误差,根据式(11)偏振相位误差可以表示为:
(12)
2 各光学器件偏振串扰仿真及分析
本文以建立的光路模型为依据,结合式(11)和(12),分析各光学器件的性能对偏振相位误差的影响。
2.1 光源偏振度P与偏振相位误差
若不考虑部分损耗和耦合,设光纤耦合器分光比为1∶1,偏振器消光比ε=0.025,光源假定为线偏振光,椭圆方位角ψ=0.1 rad。光源偏振度P与偏振串扰相位误差φe的关系如图1所示。
根据图2仿真结果,当光源偏振度P=0时,对应相位误差φe=0,且相位误差φe与光源偏振度P呈近似正比的关系。为减小由于光源偏振度导致的相位误差可以考虑选用非偏振光源。

图2 消光比ε与输出光强Iout的关系Fig.2 The relations between polarization extinction ratio and output light intensity
2.2 消光比与干涉光强
当不考虑光纤陀螺光路中耦合且假设各器件尾纤熔接点无失准角。由于实际情况下Y波导中集成偏振器的消光比ε不可能为零。假设φs表示不同转速下输出的Sagnac相移,当φs=π/6,π/3,π/2时,根据光路模型,消光比ε与干涉光强Iout在不同φs时的仿真曲线如图2所示。
如图2所示,在同一的转速下,消光比ε增大,输出光强Iout也增大且在ε逐渐增大的过程中Iout的增长速度变快。不同转速下,消光比ε与输出光强Iout变化规律大体相同。
2.3 光纤环内偏振串扰点等效
通过麦克尔逊干涉仪测量出光纤环中偏振串扰信息,当建立不同温度下光纤陀螺光路模型时,可以将光纤环中的偏振串扰点等效为纤与纤之间的熔接点,通过已知的偏振串扰强度计算两段光纤偏振面旋转角度即对轴角度θ,再根据偏振面旋转角度对偏振相位误差的影响进行分析,最终得到偏振相位误差与偏振串扰强度之间的关系。
通常情况下β=0,故式(3)中串扰强度主要由h1项组成,则h1项串扰强度和对轴角度α之间的关系如图3所示。

图3 偏振串扰强度和对轴角度之间的关系Fig.3 The relationship between coupling intensity and alignment angle
根据建立的光路模型和偏振相位误差表达式(12),推导出光纤环中偏振串扰强度等效的对轴角度θ与光纤陀螺偏振相位误差的关系如图4所示。

图4 偏振面旋转角与相位误差的关系Fig.4 Output error in FOG with the variation of the polarization plane rotation
图4中的曲线表明,陀螺输出相位误差随偏振串扰强度等效的对轴角度θ的变化,呈近似正比关系,当对轴角度θ=0时相位误差也为0,综上光纤环中的偏振串扰强度越小,陀螺输出偏振相位误差越小。
3 温度实验结果及分析
取实验室绕制的2个光纤环设置编号为#1和#2,进行高低温实验。参考GJB2 426 A-2004[13],得到在不同温度时光纤陀螺光路中由于偏振串扰相位误差而引起的陀螺零偏:
(13)

3.1 偏振串扰测试系统及流程
将待测光纤环放置在温箱内,设置温度为-40 ℃~60 ℃匀速升温,每隔20 ℃,待温箱温度稳定后,通过麦克尔逊干涉仪测试并记录待测光纤环中偏振串扰点位置和强度。表1和表2为统计光纤环1#和2#在不同温度情况下偏振串扰强度的均值、最大值以及串扰强度大于-40 dB的个数。

表1 不同温度点下光纤环1#的偏振串扰
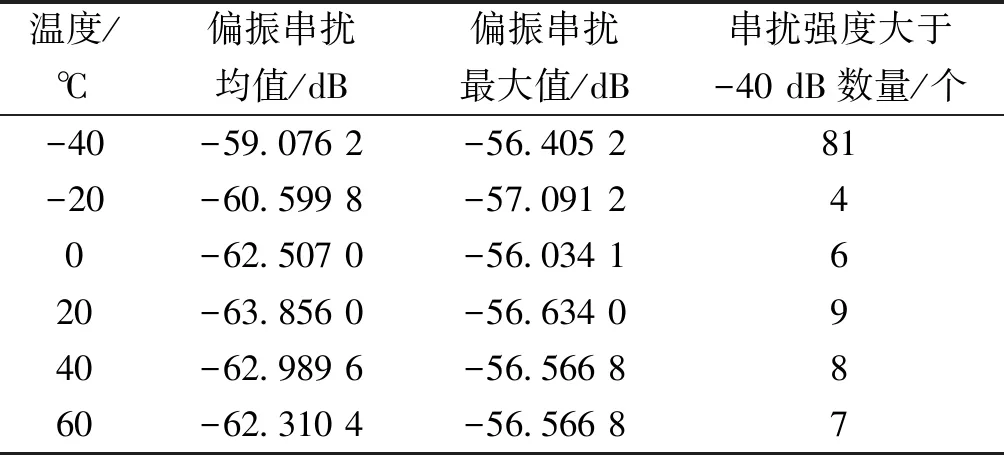
表2 不同温度点下光纤环2#的偏振串扰
对比表1和表2统计的测试结果,在不同温度点下光纤环1#和光纤环2#偏振串扰强度的均值和最大值均出现规律性变化,在温度范围端点光纤环中出现高串扰点的数目偏高,尤其在低温-40 ℃时,偏振串扰强度大于-40 dB的个数明显高于其他温度。出现该现象是由于,光纤环内部固胶在高温或低温情况下发生不可预测的体积变化,导致纤与纤之间出现挤压,光纤受到应力作用产生高串扰点。
除光纤环外,建立的光纤陀螺光路模型中各光学器件的琼斯矩阵中的元素,根据实验室用光纤陀螺的参数进行设置,光源偏振度P=1;输入光强度为1,Y波导中消光系数ε=0.025,消光比为35 dB;各器件间的尾纤为1 m;光源的波长为1 550 nm;设置光纤环偏振串扰测试温度为-40,-20,0,20,40,60,将测得的偏振串扰强度和位置的数据,代入光纤环琼斯矩阵中进行计算。
最终,根据模型得到光纤环1#和2#在不同温度点下的静态零偏预估值如表3所示,可以认为光纤环2#在全温下的性能优于1#。
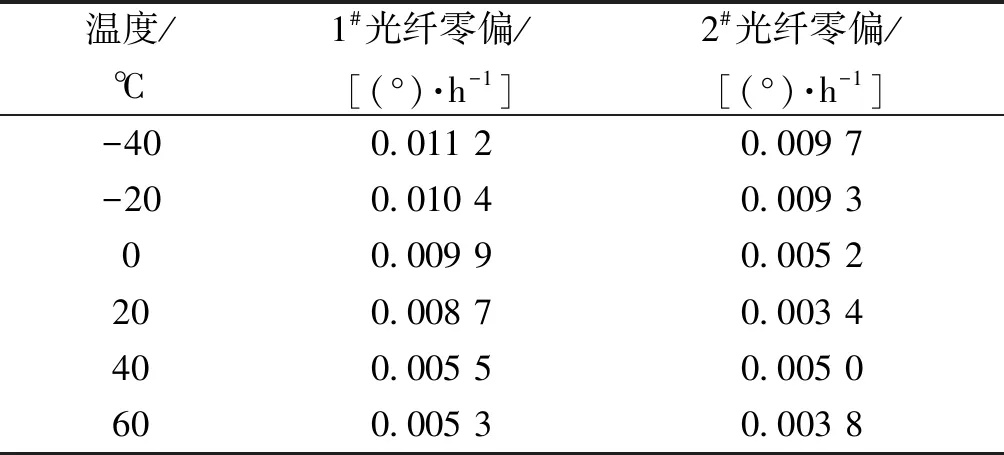
表3 全温下光纤环1#和2#静态零偏预估值
3.2 光纤陀螺静态温度实验
3.2.1 温度对陀螺性能的影响
为了验证温度对陀螺性能的影响,将光纤环1#和2#接入光纤陀螺系统。采集常温(20 ℃)状态下时陀螺的静态输出值,通过式(13)计算光纤环1#和2#的静态零偏。

表4 光纤环1#和2#的静态零偏
设置温箱温度变化范围-40 ℃~60 ℃~-40 ℃,变化速率为20 ℃/h。图6表示温度匀速变化的情况下陀螺输出数据随温度变化的曲线,通过实验证明随着温度的变化陀螺输出呈趋势性变化。
对比表4陀螺静态零偏,在变温情况下2个光纤环的静态零偏明显高于常温情况下。通过温度实验证明在建立光纤环琼斯矩阵模型时,引入温度变化量是正确且必要的。

图5 陀螺变温下静态输出曲线Fig.5 The relationship between FOG output and temperature variation
3.2.2 全温度下光纤陀螺静态输出采集
设置起始温度为-40 ℃,每升温20 ℃待温箱温度稳定后,采集该温度下2 h的光纤陀螺静态输出数据,直至升温到60 ℃。根据获得的陀螺输出数据计算出光纤环1#和2#接入的陀螺系统的静态零偏,如表5所示。
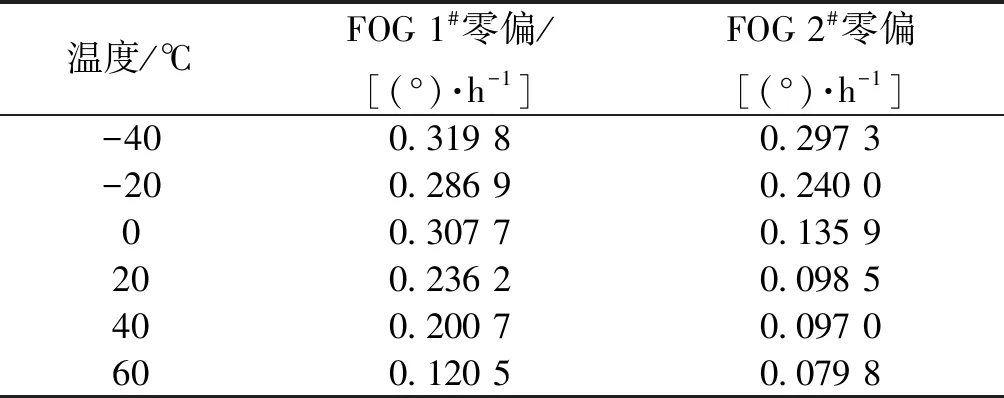
表5 全温下光纤环1#和2#零偏稳定性实测值
对比表3和表5的数据,光纤环1#和2#预估静态零偏值和实验测试静态零偏值,说明根据建立的光路模型能够得到与实验测试静态零偏较为一致的数据。因此认为根据建立的光路模型得到的预估结果能够大致反映光纤环接入系统后的实际测试结果,证明了模型具有合理性。根据光纤陀螺温度实验得到的数据,光纤环中偏振串扰的均值低,高串扰点少,由此光纤环组成的光纤陀螺静态性能好,反之静态性能差。考虑到在光纤陀螺系统中,由于偏振串扰导致的相位误差仅仅是导致零偏的一部分,预估值小于实测值是合理的。
4 结论
1)光纤陀螺静态性能在温度范围的端点会有所降低;通过光路模型解得的预估值与通过温度实验得到的测量值,结果具有线性关系。本文中提到的光纤环琼斯矩阵模型不仅仅适用于光纤陀螺用光纤环,其他领域用光纤环同样适用。
2)由于光纤环测量技术的限制,局限于在固定温度下测量光纤环,因此本文仅针对固定温度点下光纤陀螺零偏进行分析。缺少光纤陀螺在温度变化时,由于偏振串扰点位置和强度的变化对陀螺精度的影响分析。
3)建立的光路模型具有准确性和适用性,在实际工程中可以作为一种预先筛选光纤环的手段,用以提高光纤陀螺精度。
4)实验结论该模型具有准确性和通用性能够成为评估和优化光纤陀螺静态性能的理论依据。而要改进光纤环性能,则需选择保偏光纤、改进绕环技术等方向努力。
